 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgenuReality: A VR environment for research of pedestrian and autonomous vehicle interactions
Jan 12, 2022
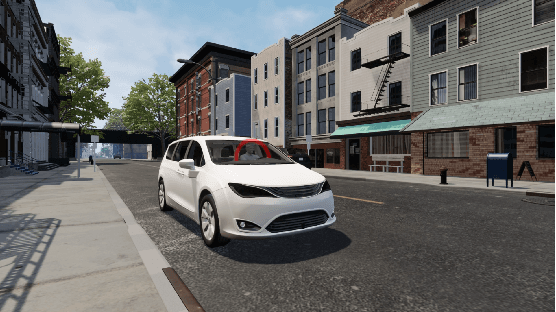


We present nuReality, a virtual reality 'VR' environment designed to test the efficacy of vehicular behaviors to communicate intent during interactions between autonomous vehicles 'AVs' and pedestrians at urban intersections. In this project we focus on expressive behaviors as a means for pedestrians to readily recognize the underlying intent of the AV's movements. VR is an ideal tool to use to test these situations as it can be immersive and place subjects into these potentially dangerous scenarios without risk. nuReality provides a novel and immersive virtual reality environment that includes numerous visual details (road and building texturing, parked cars, swaying tree limbs) as well as auditory details (birds chirping, cars honking in the distance, people talking). In these files we present the nuReality environment, its 10 unique vehicle behavior scenarios, and the Unreal Engine and Autodesk Maya source files for each scenario. The files are publicly released as open source at www.nuReality.org, to support the academic community studying the critical AV-pedestrian interaction.
Face-work for Human-Agent Joint Decision-Making
Nov 03, 2020

We propose a method to integrate face-work, a common social ritual related to trust, into a decision-making agent that works collaboratively with a human. Face-work is a set of trust-building behaviors designed to "save face" or prevent others from "losing face." This paper describes the design of a decision-making process that explicitly considers face-work as part of its action selection. We also present a simulated robot arm deployed in an online environment that can be used to evaluate the proposed method.