 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis and Perspectives on the ANA Avatar XPRIZE Competition
Jan 10, 2024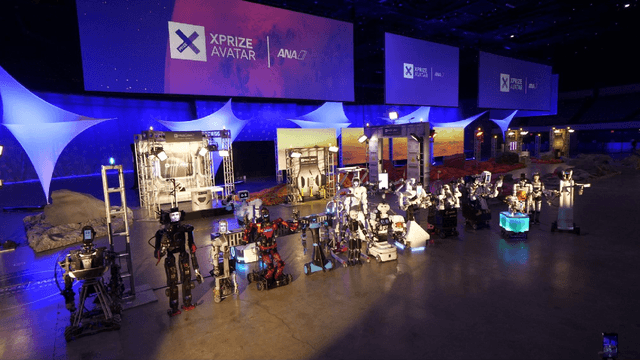
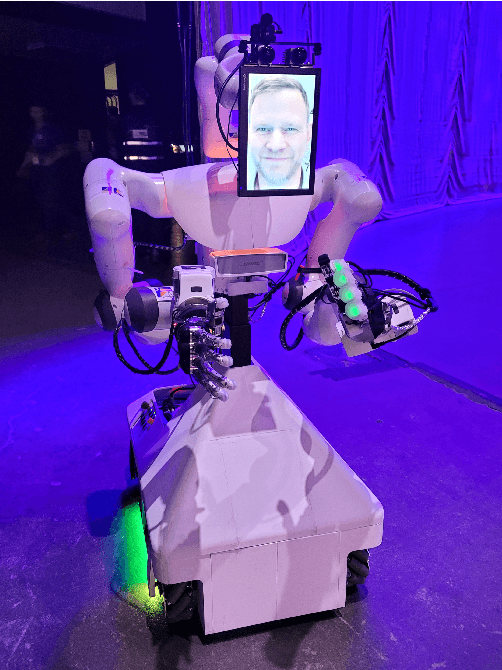
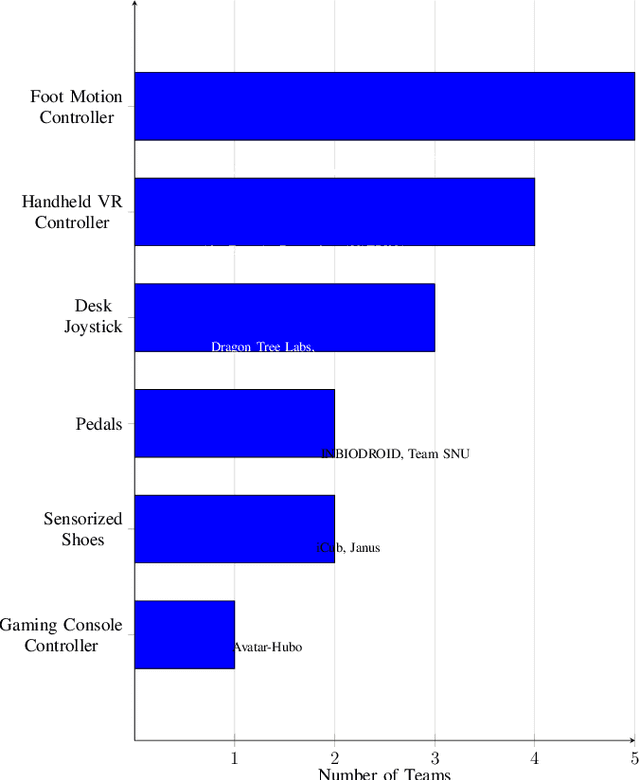
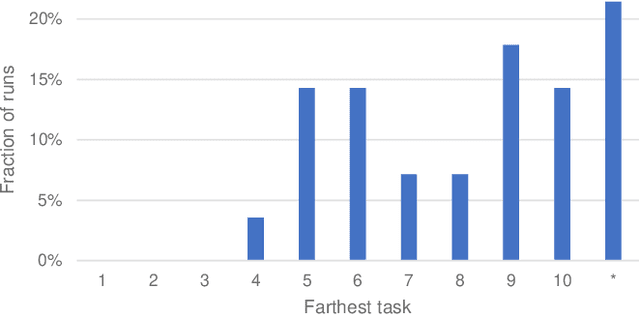
The ANA Avatar XPRIZE was a four-year competition to develop a robotic "avatar" system to allow a human operator to sense, communicate, and act in a remote environment as though physically present. The competition featured a unique requirement that judges would operate the avatars after less than one hour of training on the human-machine interfaces, and avatar systems were judged on both objective and subjective scoring metrics. This paper presents a unified summary and analysis of the competition from technical, judging, and organizational perspectives. We study the use of telerobotics technologies and innovations pursued by the competing teams in their avatar systems, and correlate the use of these technologies with judges' task performance and subjective survey ratings. It also summarizes perspectives from team leads, judges, and organizers about the competition's execution and impact to inform the future development of telerobotics and telepresence.
Privacy-Preserving Pose Estimation for Human-Robot Interaction
Nov 14, 2020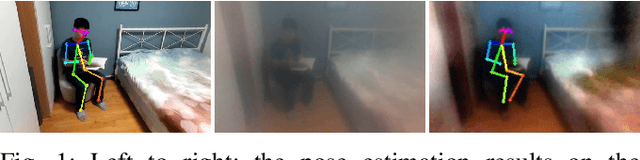
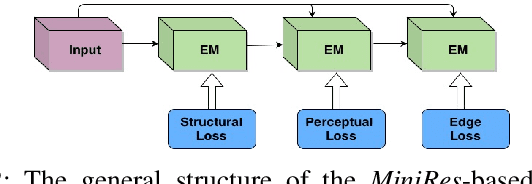

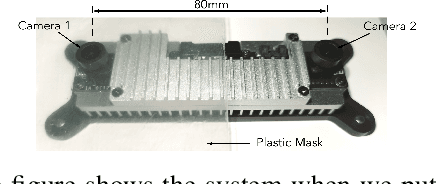
Pose estimation is an important technique for nonverbal human-robot interaction. That said, the presence of a camera in a person's space raises privacy concerns and could lead to distrust of the robot. In this paper, we propose a privacy-preserving camera-based pose estimation method. The proposed system consists of a user-controlled translucent filter that covers the camera and an image enhancement module designed to facilitate pose estimation from the filtered (shadow) images, while never capturing clear images of the user. We evaluate the system's performance on a new filtered image dataset, considering the effects of distance from the camera, background clutter, and film thickness. Based on our findings, we conclude that our system can protect humans' privacy while detecting humans' pose information effectively.
Analytical Inverse Kinematics for a 5-DoF Robotic Arm with a Prismatic Joint
Nov 14, 2020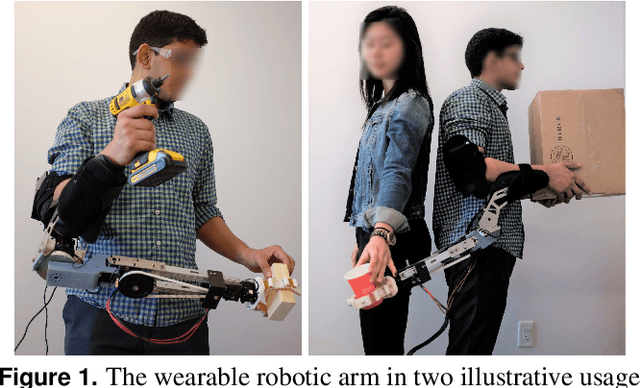

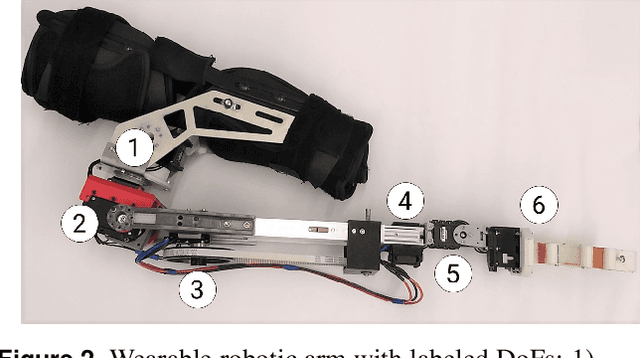
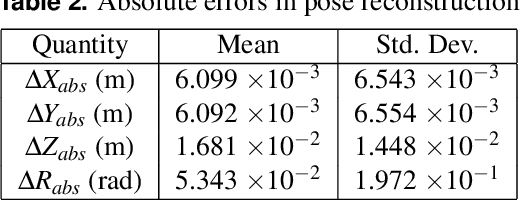
We present an analytical solution for the inverse kinematics (IK) of a robotic arm with one prismatic joint and four revolute joints. This 5-DoF design is a result of minimizing weight while preserving functionality of the device in a wearable usage context. Generally, the IK problem for a 5-DoF robot does not guarantee solutions due to the system being over-constrained. We obtain an analytical solution by applying geometric projections and limiting the ranges of motion for each DoF. We validate this solution by reconstructing randomly sampled end-effector poses, and find position errors below 2 cm and orientation errors below 4 degrees.
Face-work for Human-Agent Joint Decision-Making
Nov 03, 2020

We propose a method to integrate face-work, a common social ritual related to trust, into a decision-making agent that works collaboratively with a human. Face-work is a set of trust-building behaviors designed to "save face" or prevent others from "losing face." This paper describes the design of a decision-making process that explicitly considers face-work as part of its action selection. We also present a simulated robot arm deployed in an online environment that can be used to evaluate the proposed method.
Formalizing and Guaranteeing* Human-Robot Interaction
Jun 30, 2020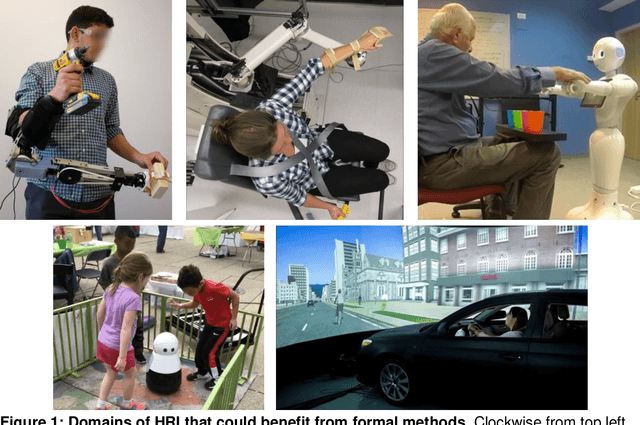
Robot capabilities are maturing across domains, from self-driving cars, to bipeds and drones. As a result, robots will soon no longer be confined to safety-controlled industrial settings; instead, they will directly interact with the general public. The growing field of Human-Robot Interaction (HRI) studies various aspects of this scenario - from social norms to joint action to human-robot teams and more. Researchers in HRI have made great strides in developing models, methods, and algorithms for robots acting with and around humans, but these "computational HRI" models and algorithms generally do not come with formal guarantees and constraints on their operation. To enable human-interactive robots to move from the lab to real-world deployments, we must address this gap. This article provides an overview of verification, validation and synthesis techniques used to create demonstrably trustworthy systems, describes several HRI domains that could benefit from such techniques, and provides a roadmap for the challenges and the research needed to create formalized and guaranteed human-robot interaction.
Software architecture for YOLO, a creativity-stimulating robot
Sep 24, 2019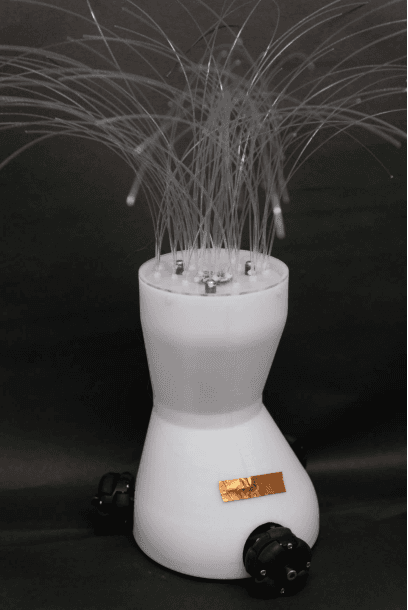
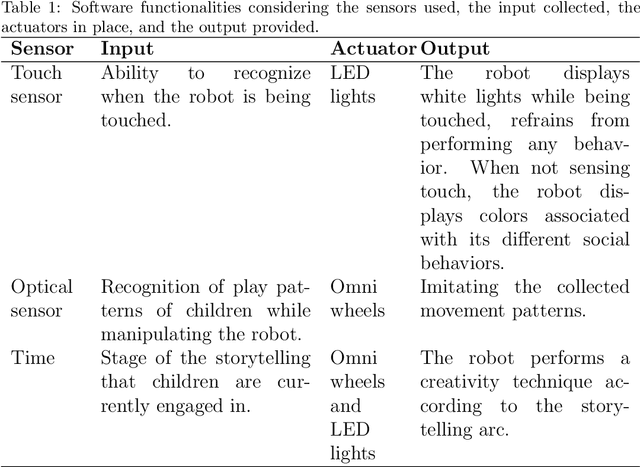
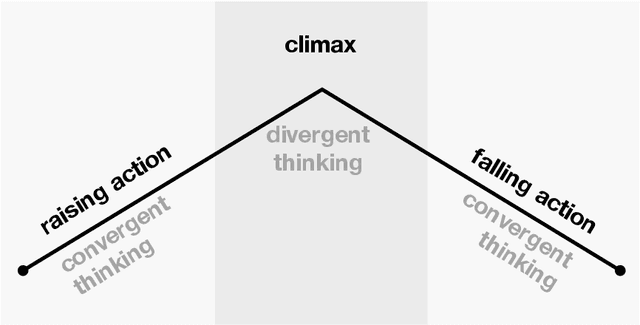

YOLO is a social robot designed and developed to stimulate creativity in children through storytelling activities. Children use it as a character in their stories. This article details the artificial intelligence software developed for YOLO. The implemented software schedules through several Creativity Behaviors to find the ones that stimulate creativity more effectively. YOLO can choose between convergent and divergent thinking techniques, two important processes of creative thought. These techniques were developed based on the psychological theories of creativity development and on research from creativity experts who work with children. Additionally, this software allows the creation of Social Behaviors that enable the robot to behave as a believable character. On top of our framework, we built 3 main social behavior parameters: Exuberant, Aloof, and Harmonious. These behaviors are meant to ease immersive play and the process of character creation. The 3 social behaviors were based on psychological theories of personality and developed using children's input during co-design studies. Overall, this work presents an attempt to design, develop, and deploy social robots that nurture intrinsic human abilities, such as the ability to be creative.