 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEMOTION: Expressive Motion Sequence Generation for Humanoid Robots with In-Context Learning
Oct 30, 2024



This paper introduces a framework, called EMOTION, for generating expressive motion sequences in humanoid robots, enhancing their ability to engage in humanlike non-verbal communication. Non-verbal cues such as facial expressions, gestures, and body movements play a crucial role in effective interpersonal interactions. Despite the advancements in robotic behaviors, existing methods often fall short in mimicking the diversity and subtlety of human non-verbal communication. To address this gap, our approach leverages the in-context learning capability of large language models (LLMs) to dynamically generate socially appropriate gesture motion sequences for human-robot interaction. We use this framework to generate 10 different expressive gestures and conduct online user studies comparing the naturalness and understandability of the motions generated by EMOTION and its human-feedback version, EMOTION++, against those by human operators. The results demonstrate that our approach either matches or surpasses human performance in generating understandable and natural robot motions under certain scenarios. We also provide design implications for future research to consider a set of variables when generating expressive robotic gestures.
Privacy-Preserving Pose Estimation for Human-Robot Interaction
Nov 14, 2020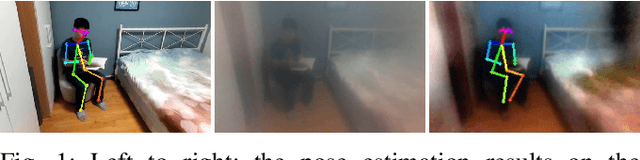
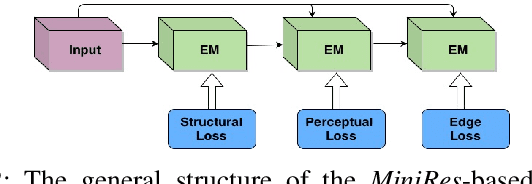

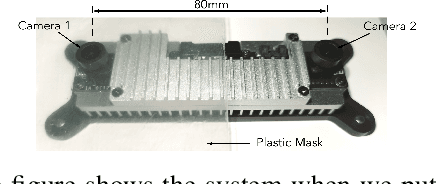
Pose estimation is an important technique for nonverbal human-robot interaction. That said, the presence of a camera in a person's space raises privacy concerns and could lead to distrust of the robot. In this paper, we propose a privacy-preserving camera-based pose estimation method. The proposed system consists of a user-controlled translucent filter that covers the camera and an image enhancement module designed to facilitate pose estimation from the filtered (shadow) images, while never capturing clear images of the user. We evaluate the system's performance on a new filtered image dataset, considering the effects of distance from the camera, background clutter, and film thickness. Based on our findings, we conclude that our system can protect humans' privacy while detecting humans' pose information effectively.