 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormalizing and Guaranteeing* Human-Robot Interaction
Jun 30, 2020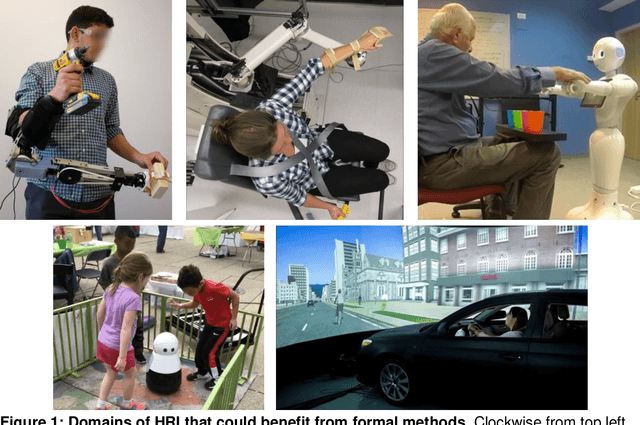
Robot capabilities are maturing across domains, from self-driving cars, to bipeds and drones. As a result, robots will soon no longer be confined to safety-controlled industrial settings; instead, they will directly interact with the general public. The growing field of Human-Robot Interaction (HRI) studies various aspects of this scenario - from social norms to joint action to human-robot teams and more. Researchers in HRI have made great strides in developing models, methods, and algorithms for robots acting with and around humans, but these "computational HRI" models and algorithms generally do not come with formal guarantees and constraints on their operation. To enable human-interactive robots to move from the lab to real-world deployments, we must address this gap. This article provides an overview of verification, validation and synthesis techniques used to create demonstrably trustworthy systems, describes several HRI domains that could benefit from such techniques, and provides a roadmap for the challenges and the research needed to create formalized and guaranteed human-robot interaction.
A Deformable Interface for Human Touch Recognition using Stretchable Carbon Nanotube Dielectric Elastomer Sensors and Deep Neural Networks
Mar 24, 2018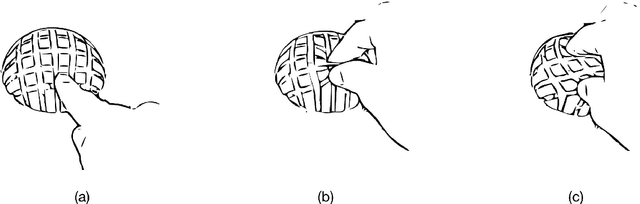
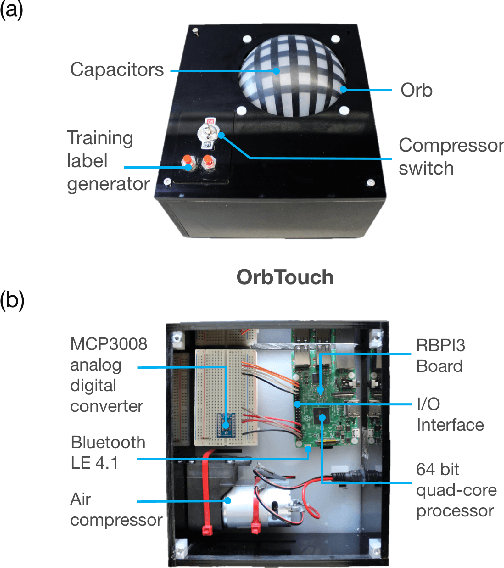
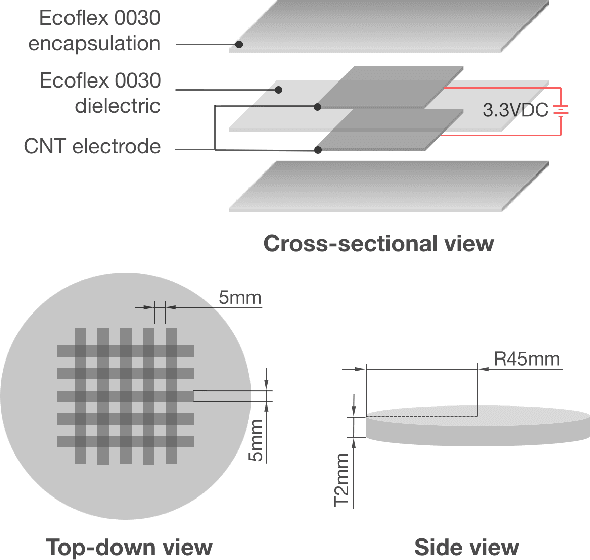
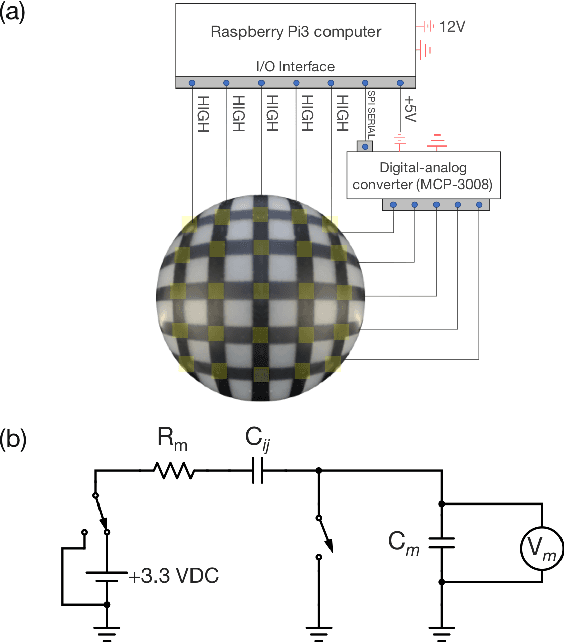
User interfaces provide an interactive window between physical and virtual environments. A new concept in the field of human-computer interaction is a soft user interface; a compliant surface that facilitates touch interaction through deformation. Despite the potential of these interfaces, they currently lack a signal processing framework that can efficiently extract information from their deformation. Here we present OrbTouch, a device that uses statistical learning algorithms, based on convolutional neural networks, to map deformations from human touch to categorical labels (i.e., gestures) and touch location using stretchable capacitor signals as inputs. We demonstrate this approach by using the device to control the popular game Tetris. OrbTouch provides a modular, robust framework to interpret deformation in soft media, laying a foundation for new modes of human computer interaction through shape changing solids.