 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePBP: Path-based Trajectory Prediction for Autonomous Driving
Sep 07, 2023



Trajectory prediction plays a crucial role in the autonomous driving stack by enabling autonomous vehicles to anticipate the motion of surrounding agents. Goal-based prediction models have gained traction in recent years for addressing the multimodal nature of future trajectories. Goal-based prediction models simplify multimodal prediction by first predicting 2D goal locations of agents and then predicting trajectories conditioned on each goal. However, a single 2D goal location serves as a weak inductive bias for predicting the whole trajectory, often leading to poor map compliance, i.e., part of the trajectory going off-road or breaking traffic rules. In this paper, we improve upon goal-based prediction by proposing the Path-based prediction (PBP) approach. PBP predicts a discrete probability distribution over reference paths in the HD map using the path features and predicts trajectories in the path-relative Frenet frame. We applied the PBP trajectory decoder on top of the HiVT scene encoder and report results on the Argoverse dataset. Our experiments show that PBP achieves competitive performance on the standard trajectory prediction metrics, while significantly outperforming state-of-the-art baselines in terms of map compliance.
Improving Motion Forecasting for Autonomous Driving with the Cycle Consistency Loss
Oct 31, 2022Robust motion forecasting of the dynamic scene is a critical component of an autonomous vehicle. It is a challenging problem due to the heterogeneity in the scene and the inherent uncertainties in the problem. To improve the accuracy of motion forecasting, in this work, we identify a new consistency constraint in this task, that is an agent's future trajectory should be coherent with its history observations and visa versa. To leverage this property, we propose a novel cycle consistency training scheme and define a novel cycle loss to encourage this consistency. In particular, we reverse the predicted future trajectory backward in time and feed it back into the prediction model to predict the history and compute the loss as an additional cycle loss term. Through our experiments on the Argoverse dataset, we demonstrate that cycle loss can improve the performance of competitive motion forecasting models.
Importance is in your attention: agent importance prediction for autonomous driving
Apr 19, 2022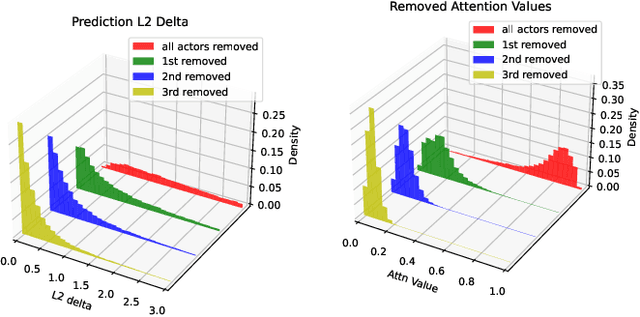
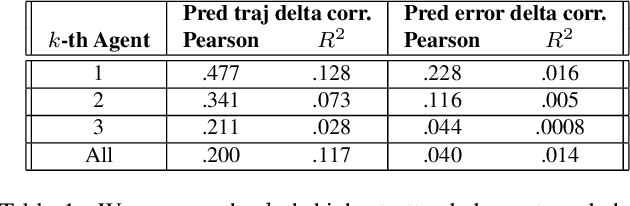
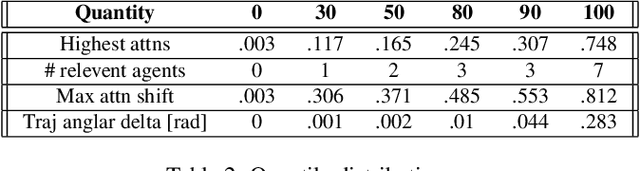
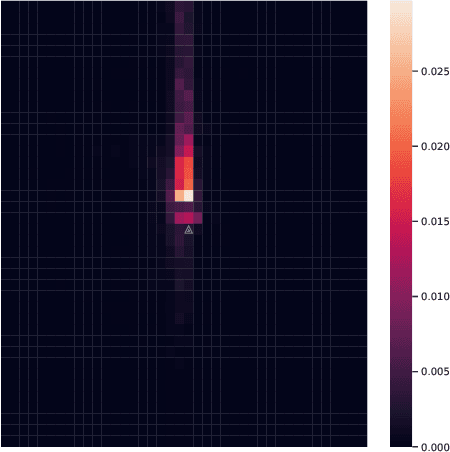
Trajectory prediction is an important task in autonomous driving. State-of-the-art trajectory prediction models often use attention mechanisms to model the interaction between agents. In this paper, we show that the attention information from such models can also be used to measure the importance of each agent with respect to the ego vehicle's future planned trajectory. Our experiment results on the nuPlans dataset show that our method can effectively find and rank surrounding agents by their impact on the ego's plan.