 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning for Blind Stair Climbing with Legged and Wheeled-Legged Robots
Feb 09, 2024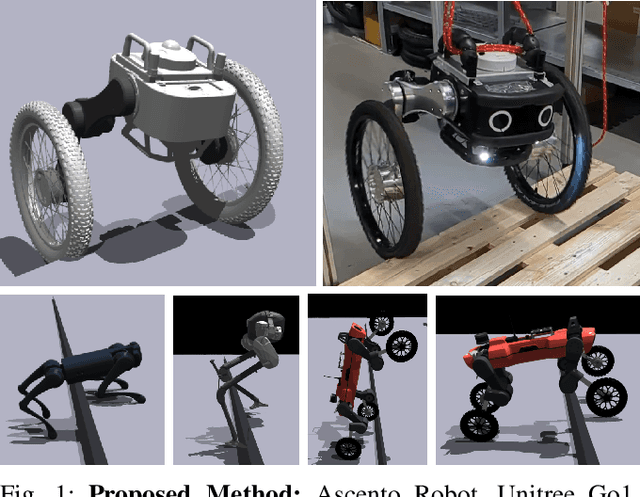
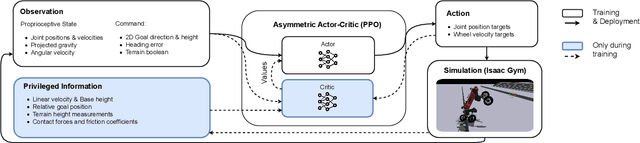
In recent years, legged and wheeled-legged robots have gained prominence for tasks in environments predominantly created for humans across various domains. One significant challenge faced by many of these robots is their limited capability to navigate stairs, which hampers their functionality in multi-story environments. This study proposes a method aimed at addressing this limitation, employing reinforcement learning to develop a versatile controller applicable to a wide range of robots. In contrast to the conventional velocity-based controllers, our approach builds upon a position-based formulation of the RL task, which we show to be vital for stair climbing. Furthermore, the methodology leverages an asymmetric actor-critic structure, enabling the utilization of privileged information from simulated environments during training while eliminating the reliance on exteroceptive sensors during real-world deployment. Another key feature of the proposed approach is the incorporation of a boolean observation within the controller, enabling the activation or deactivation of a stair-climbing mode. We present our results on different quadrupeds and bipedal robots in simulation and showcase how our method allows the balancing robot Ascento to climb 15cm stairs in the real world, a task that was previously impossible for this robot.
AMZ Driverless: The Full Autonomous Racing System
May 13, 2019
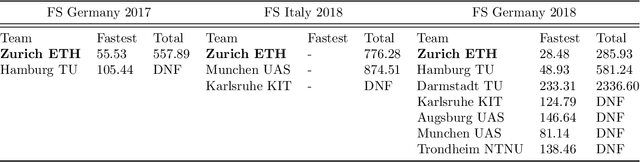
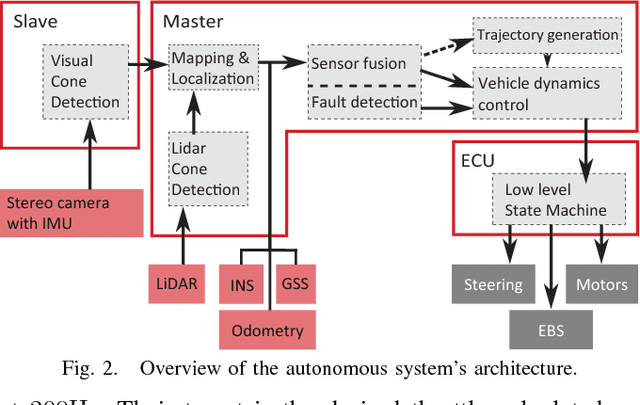
This paper presents the algorithms and system architecture of an autonomous racecar. The introduced vehicle is powered by a software stack designed for robustness, reliability, and extensibility. In order to autonomously race around a previously unknown track, the proposed solution combines state of the art techniques from different fields of robotics. Specifically, perception, estimation, and control are incorporated into one high-performance autonomous racecar. This complex robotic system, developed by AMZ Driverless and ETH Zurich, finished 1st overall at each competition we attended: Formula Student Germany 2017, Formula Student Italy 2018 and Formula Student Germany 2018. We discuss the findings and learnings from these competitions and present an experimental evaluation of each module of our solution.
Design of an Autonomous Racecar: Perception, State Estimation and System Integration
Apr 09, 2018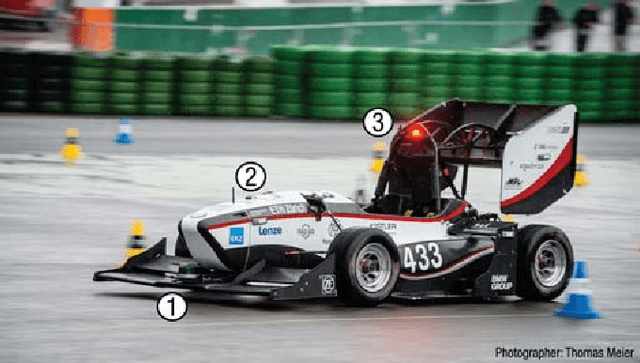
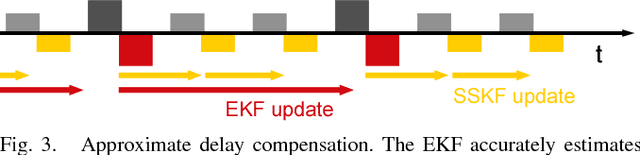
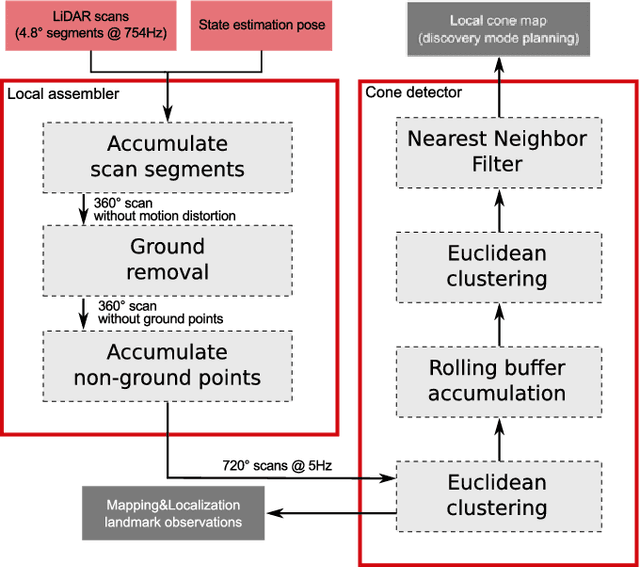
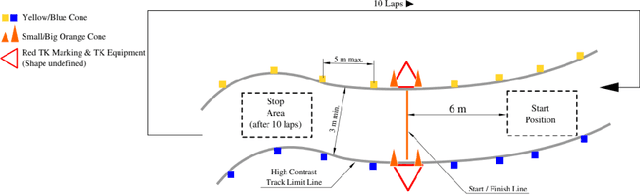
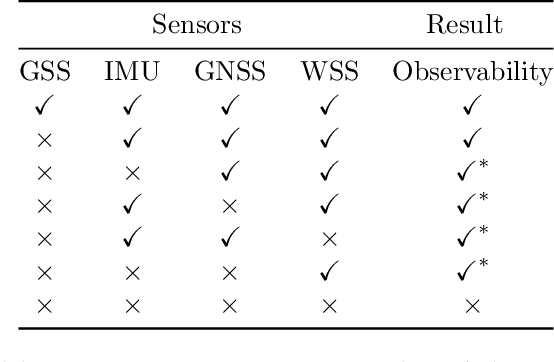
This paper introduces fl\"uela driverless: the first autonomous racecar to win a Formula Student Driverless competition. In this competition, among other challenges, an autonomous racecar is tasked to complete 10 laps of a previously unknown racetrack as fast as possible and using only onboard sensing and computing. The key components of fl\"uela's design are its modular redundant sub-systems that allow robust performance despite challenging perceptual conditions or partial system failures. The paper presents the integration of key components of our autonomous racecar, i.e., system design, EKF-based state estimation, LiDAR-based perception, and particle filter-based SLAM. We perform an extensive experimental evaluation on real-world data, demonstrating the system's effectiveness by outperforming the next-best ranking team by almost half the time required to finish a lap. The autonomous racecar reaches lateral and longitudinal accelerations comparable to those achieved by experienced human drivers.