 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Accurate Mapping for Autonomous Racing
Mar 12, 2020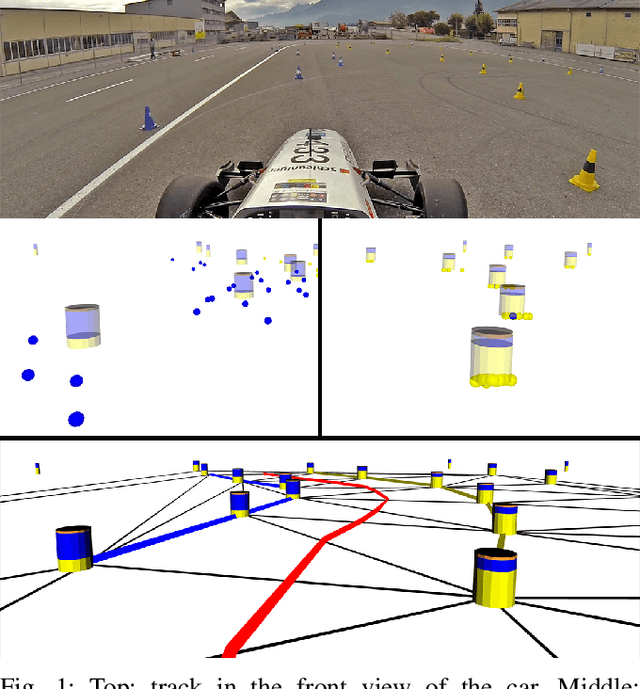
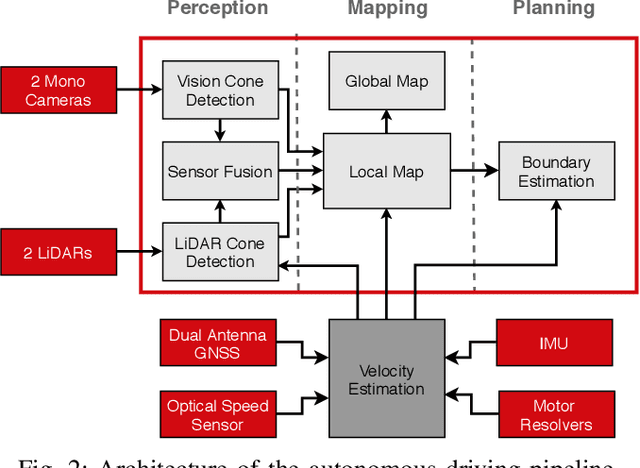
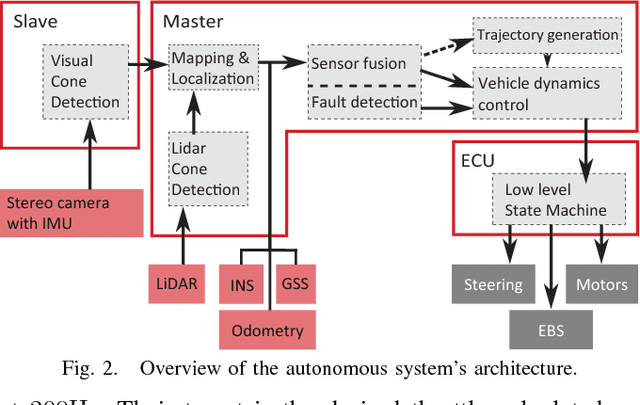
This paper presents the perception, mapping, and planning pipeline implemented on an autonomous race car. It was developed by the 2019 AMZ driverless team for the Formula Student Germany (FSG) 2019 driverless competition, where it won 1st place overall. The presented solution combines early fusion of camera and LiDAR data, a layered mapping approach, and a planning approach that uses Bayesian filtering to achieve high-speed driving on unknown race tracks while creating accurate maps. We benchmark the method against our team's previous solution, which won FSG 2018, and show improved accuracy when driving at the same speeds. Furthermore, the new pipeline makes it possible to reliably raise the maximum driving speed in unknown environments from 3~m/s to 12~m/s while still mapping with an acceptable RMSE of 0.29~m.
Deep Unsupervised Common Representation Learning for LiDAR and Camera Data using Double Siamese Networks
Jan 03, 2020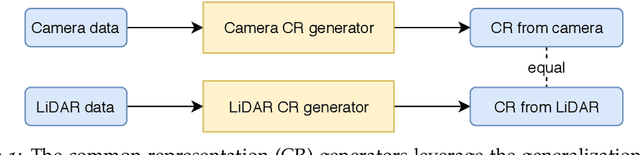
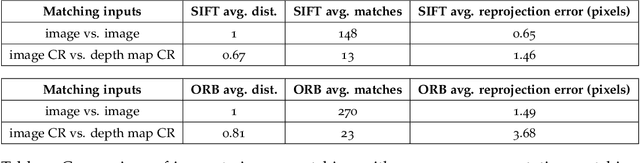
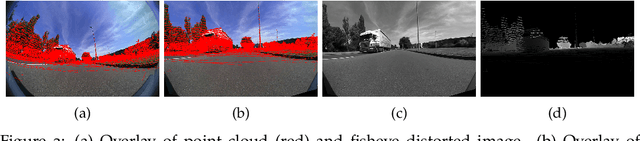
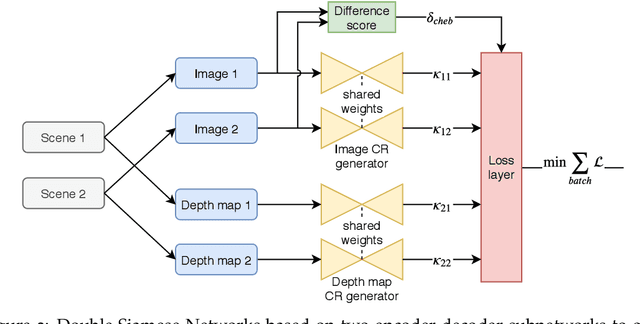
Domain gaps of sensor modalities pose a challenge for the design of autonomous robots. Taking a step towards closing this gap, we propose two unsupervised training frameworks for finding a common representation of LiDAR and camera data. The first method utilizes a double Siamese training structure to ensure consistency in the results. The second method uses a Canny edge image guiding the networks towards a desired representation. All networks are trained in an unsupervised manner, leaving room for scalability. The results are evaluated using common computer vision applications, and the limitations of the proposed approaches are outlined.
OREOS: Oriented Recognition of 3D Point Clouds in Outdoor Scenarios
Mar 19, 2019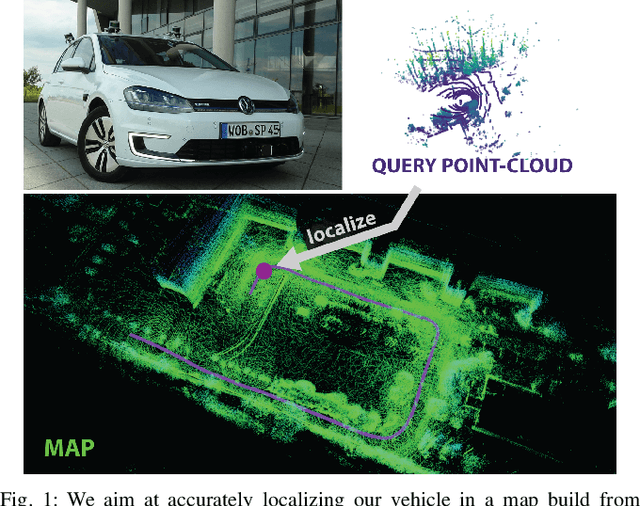

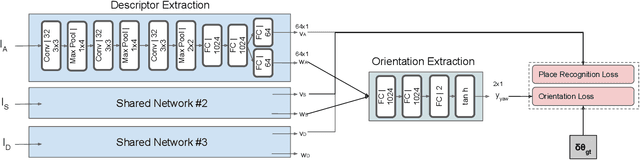
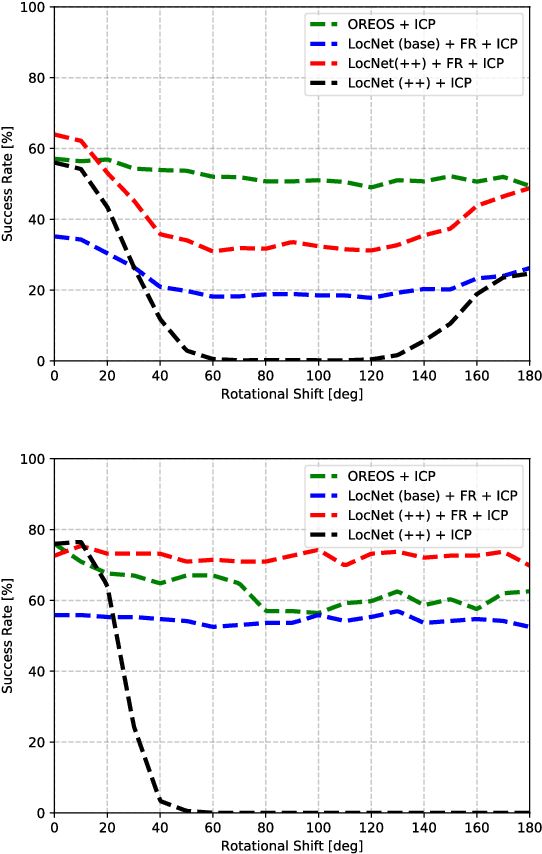
We introduce a novel method for oriented place recognition with 3D LiDAR scans. A Convolutional Neural Network is trained to extract compact descriptors from single 3D LiDAR scans. These can be used both to retrieve near-by place candidates from a map, and to estimate the yaw discrepancy needed for bootstrapping local registration methods. We employ a triplet loss function for training and use a hard-negative mining strategy to further increase the performance of our descriptor extractor. In an evaluation on the NCLT and KITTI datasets, we demonstrate that our method outperforms related state-of-the-art approaches based on both data-driven and handcrafted data representation in challenging long-term outdoor conditions.
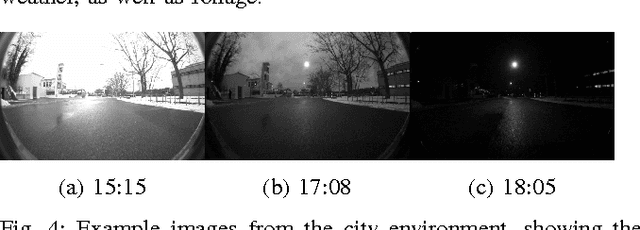
VIZARD: Reliable Visual Localization for Autonomous Vehicles in Urban Outdoor Environments
Feb 12, 2019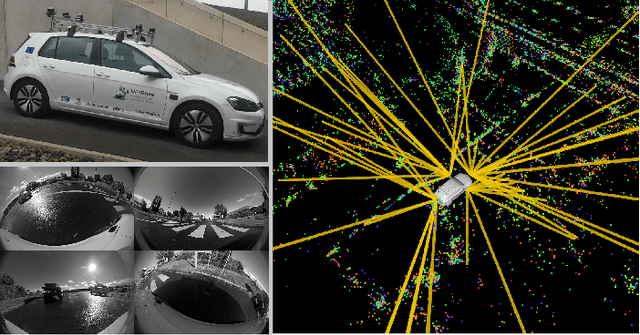
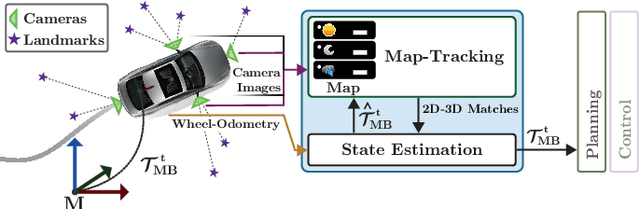
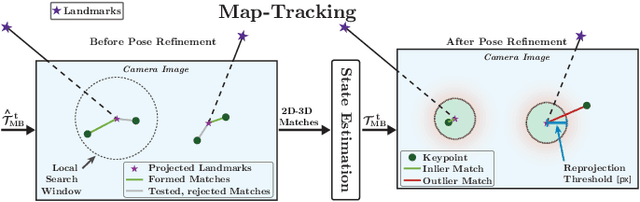
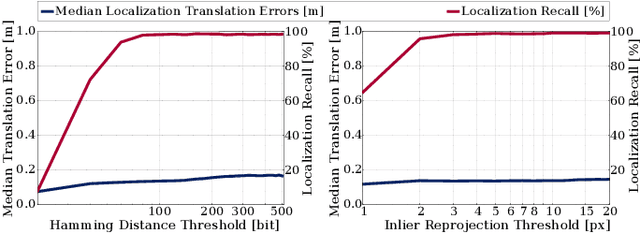
Changes in appearance is one of the main sources of failure in visual localization systems in outdoor environments. To address this challenge, we present VIZARD, a visual localization system for urban outdoor environments. By combining a local localization algorithm with the use of multi-session maps, a high localization recall can be achieved across vastly different appearance conditions. The fusion of the visual localization constraints with wheel-odometry in a state estimation framework further guarantees smooth and accurate pose estimates. In an extensive experimental evaluation on several hundreds of driving kilometers in challenging urban outdoor environments, we analyze the recall and accuracy of our localization system, investigate its key parameters and boundary conditions, and compare different types of feature descriptors. Our results show that VIZARD is able to achieve nearly 100% recall with a localization accuracy below 0.5m under varying outdoor appearance conditions, including at night-time.
Redundant Perception and State Estimation for Reliable Autonomous Racing
Sep 26, 2018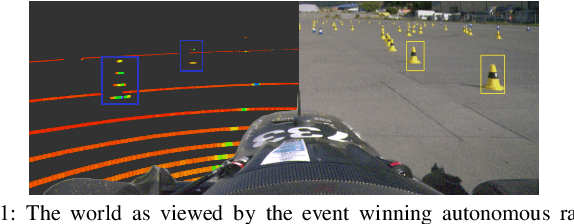
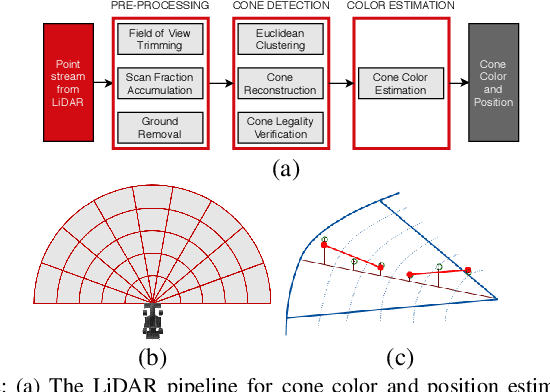
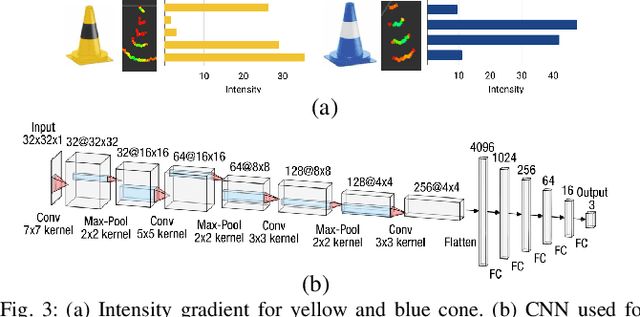
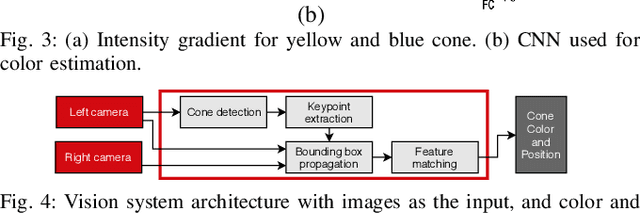
In autonomous racing, vehicles operate close to the limits of handling and a sensor failure can have critical consequences. To limit the impact of such failures, this paper presents the redundant perception and state estimation approaches developed for an autonomous race car. Redundancy in perception is achieved by estimating the color and position of the track delimiting objects using two sensor modalities independently. Specifically, learning-based approaches are used to generate color and pose estimates, from LiDAR and camera data respectively. The redundant perception inputs are fused by a particle filter based SLAM algorithm that operates in real-time. Velocity is estimated using slip dynamics, with reliability being ensured through a probabilistic failure detection algorithm. The sub-modules are extensively evaluated in real-world racing conditions using the autonomous race car "gotthard driverless", achieving lateral accelerations up to 1.7G and a top speed of 90km/h.
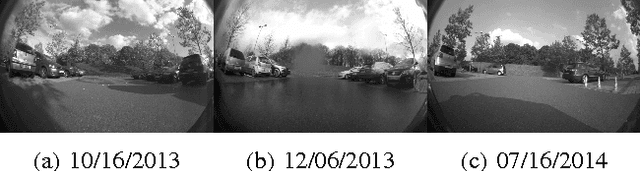
Map Management for Efficient Long-Term Visual Localization in Outdoor Environments
Aug 08, 2018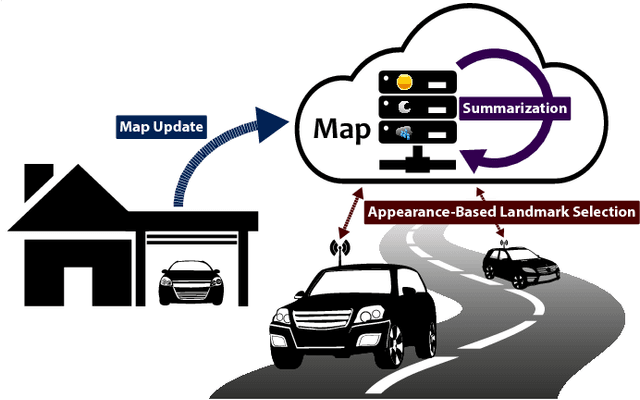
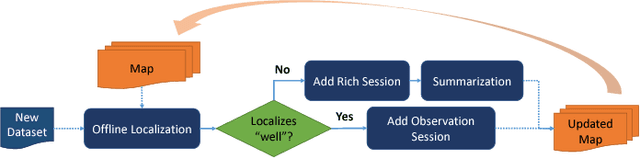
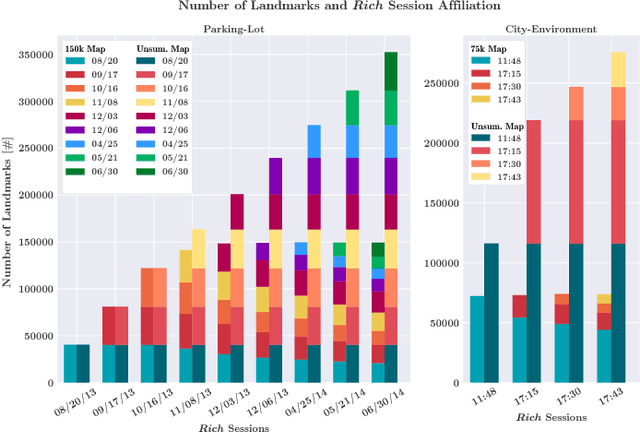
We present a complete map management process for a visual localization system designed for multi-vehicle long- term operations in resource constrained outdoor environments. Outdoor visual localization generates large amounts of data that need to be incorporated into a lifelong visual map in order to allow localization at all times and under all appearance conditions. Processing these large quantities of data is non- trivial, as it is subject to limited computational and storage capabilities both on the vehicle and on the mapping backend. We address this problem with a two-fold map update paradigm capable of, either, adding new visual cues to the map, or updating co-observation statistics. The former, in combination with offline map summarization techniques, allows enhancing the appearance coverage of the lifelong map while keeping the map size limited. On the other hand, the latter is able to significantly boost the appearance-based landmark selection for efficient online localization without incurring any additional computational or storage burden. Our evaluation in challenging outdoor conditions shows that our proposed map management process allows building and maintaining maps for precise visual localization over long time spans in a tractable and scalable fashion.
Appearance-Based Landmark Selection for Efficient Long-Term Visual Localization
Aug 08, 2018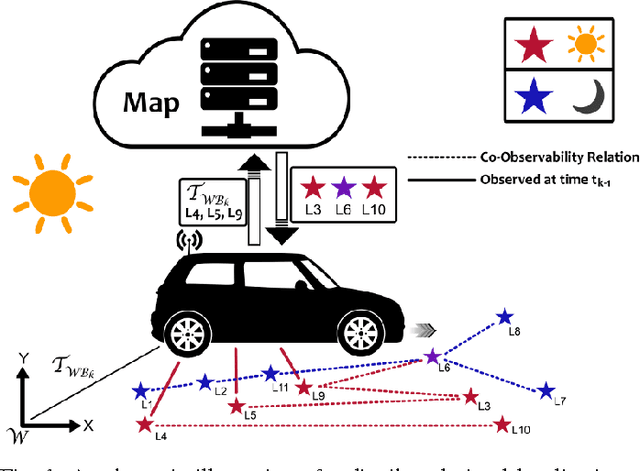
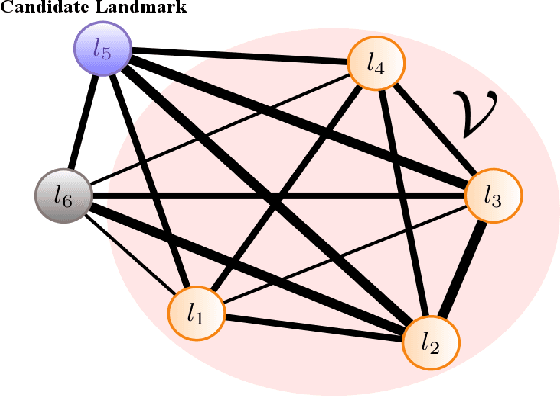
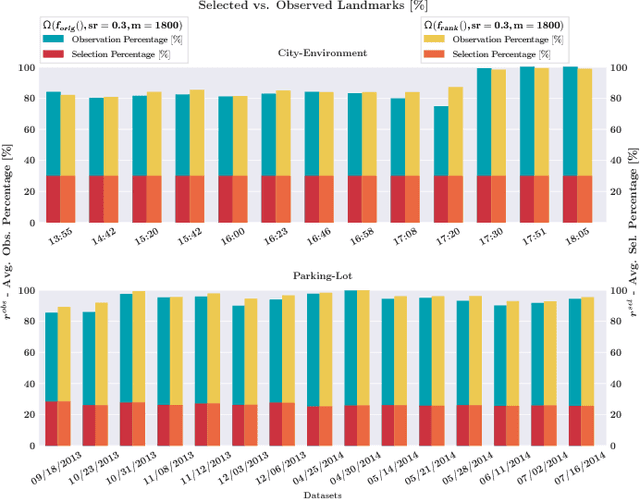
We present an online landmark selection method for distributed long-term visual localization systems in bandwidth-constrained environments. Sharing a common map for online localization provides a fleet of au- tonomous vehicles with the possibility to maintain and access a consistent map source, and therefore reduce redundancy while increasing efficiency. However, connectivity over a mobile network imposes strict bandwidth constraints and thus the need to minimize the amount of exchanged data. The wide range of varying appearance conditions encountered during long-term visual localization offers the potential to reduce data usage by extracting only those visual cues which are relevant at the given time. Motivated by this, we propose an unsupervised method of adaptively selecting landmarks according to how likely these landmarks are to be observable under the prevailing appear- ance condition. The ranking function this selection is based upon exploits landmark co-observability statistics collected in past traversals through the mapped area. Evaluation is per- formed over different outdoor environments, large time-scales and varying appearance conditions, including the extreme tran- sition from day-time to night-time, demonstrating that with our appearance-dependent selection method, we can significantly reduce the amount of landmarks used for localization while maintaining or even improving the localization performance.
Design of an Autonomous Racecar: Perception, State Estimation and System Integration
Apr 09, 2018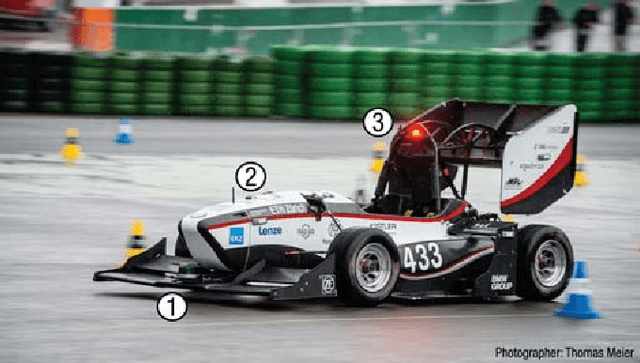
This paper introduces fl\"uela driverless: the first autonomous racecar to win a Formula Student Driverless competition. In this competition, among other challenges, an autonomous racecar is tasked to complete 10 laps of a previously unknown racetrack as fast as possible and using only onboard sensing and computing. The key components of fl\"uela's design are its modular redundant sub-systems that allow robust performance despite challenging perceptual conditions or partial system failures. The paper presents the integration of key components of our autonomous racecar, i.e., system design, EKF-based state estimation, LiDAR-based perception, and particle filter-based SLAM. We perform an extensive experimental evaluation on real-world data, demonstrating the system's effectiveness by outperforming the next-best ranking team by almost half the time required to finish a lap. The autonomous racecar reaches lateral and longitudinal accelerations comparable to those achieved by experienced human drivers.