 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMap Management for Efficient Long-Term Visual Localization in Outdoor Environments
Paper and Code
Aug 08, 2018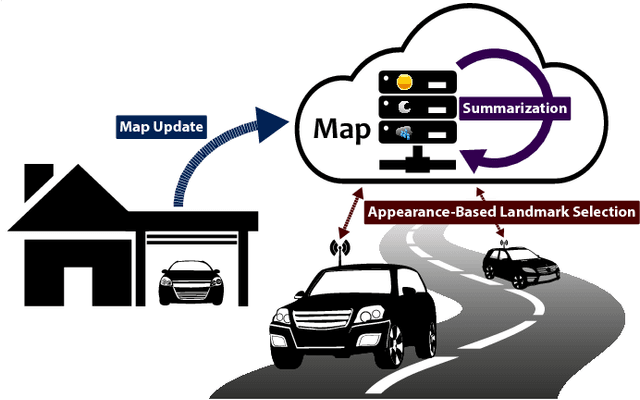
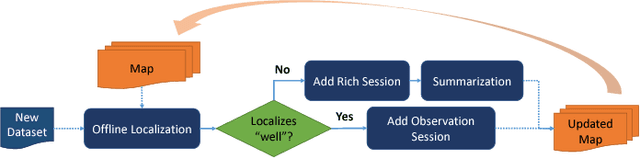
We present a complete map management process for a visual localization system designed for multi-vehicle long- term operations in resource constrained outdoor environments. Outdoor visual localization generates large amounts of data that need to be incorporated into a lifelong visual map in order to allow localization at all times and under all appearance conditions. Processing these large quantities of data is non- trivial, as it is subject to limited computational and storage capabilities both on the vehicle and on the mapping backend. We address this problem with a two-fold map update paradigm capable of, either, adding new visual cues to the map, or updating co-observation statistics. The former, in combination with offline map summarization techniques, allows enhancing the appearance coverage of the lifelong map while keeping the map size limited. On the other hand, the latter is able to significantly boost the appearance-based landmark selection for efficient online localization without incurring any additional computational or storage burden. Our evaluation in challenging outdoor conditions shows that our proposed map management process allows building and maintaining maps for precise visual localization over long time spans in a tractable and scalable fashion.