 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn RLS-Based Instantaneous Velocity Estimator for Extended Radar Tracking
Feb 24, 2020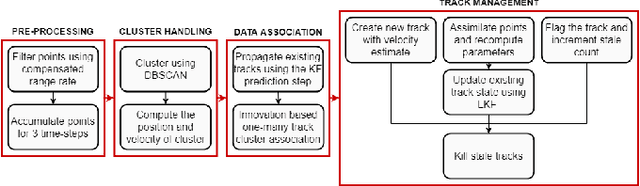
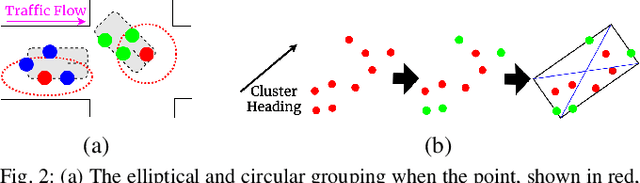
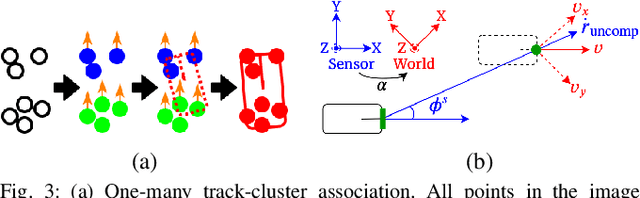
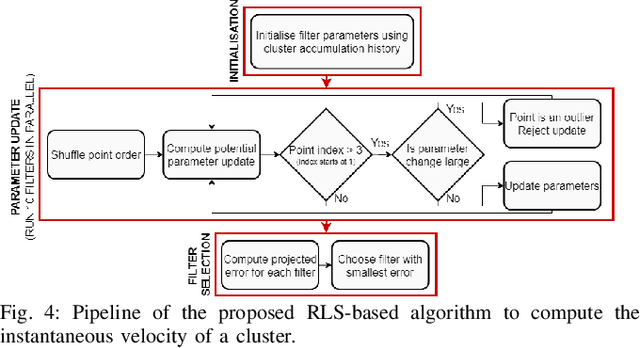
Radar sensors have become an important part of the perception sensor suite due to their long range and their ability to work in adverse weather conditions. However, several shortcomings such as large amounts of noise and extreme sparsity of the point cloud result in them not being used to their full potential. In this paper, we present a novel Recursive Least Squares (RLS) based approach to estimate the instantaneous velocity of dynamic objects in real-time that is capable of handling large amounts of noise in the input data stream. We also present an end-to-end pipeline to track extended objects in real-time that uses the computed velocity estimates for data association and track initialisation. The approaches are evaluated using several real-world inspired driving scenarios that test the limits of these algorithms. It is also experimentally proven that our approaches run in real-time with frame execution time not exceeding 30 ms even in dense traffic scenarios, thus allowing for their direct implementation on autonomous vehicles.
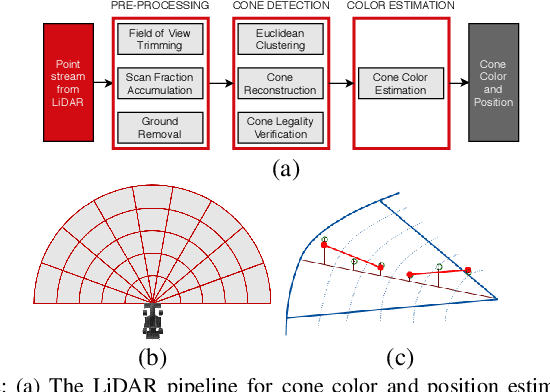
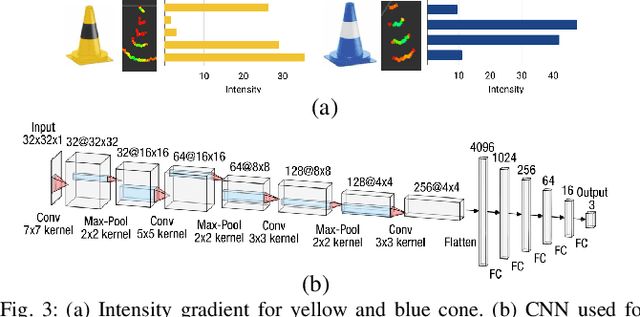
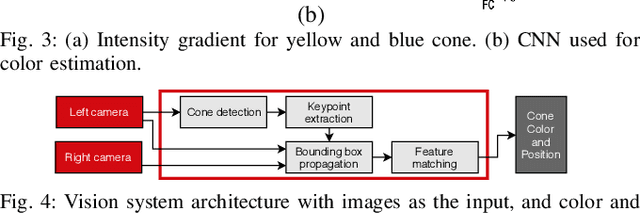
Redundant Perception and State Estimation for Reliable Autonomous Racing
Sep 26, 2018
In autonomous racing, vehicles operate close to the limits of handling and a sensor failure can have critical consequences. To limit the impact of such failures, this paper presents the redundant perception and state estimation approaches developed for an autonomous race car. Redundancy in perception is achieved by estimating the color and position of the track delimiting objects using two sensor modalities independently. Specifically, learning-based approaches are used to generate color and pose estimates, from LiDAR and camera data respectively. The redundant perception inputs are fused by a particle filter based SLAM algorithm that operates in real-time. Velocity is estimated using slip dynamics, with reliability being ensured through a probabilistic failure detection algorithm. The sub-modules are extensively evaluated in real-world racing conditions using the autonomous race car "gotthard driverless", achieving lateral accelerations up to 1.7G and a top speed of 90km/h.