 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Accurate Mapping for Autonomous Racing
Paper and Code
Mar 12, 2020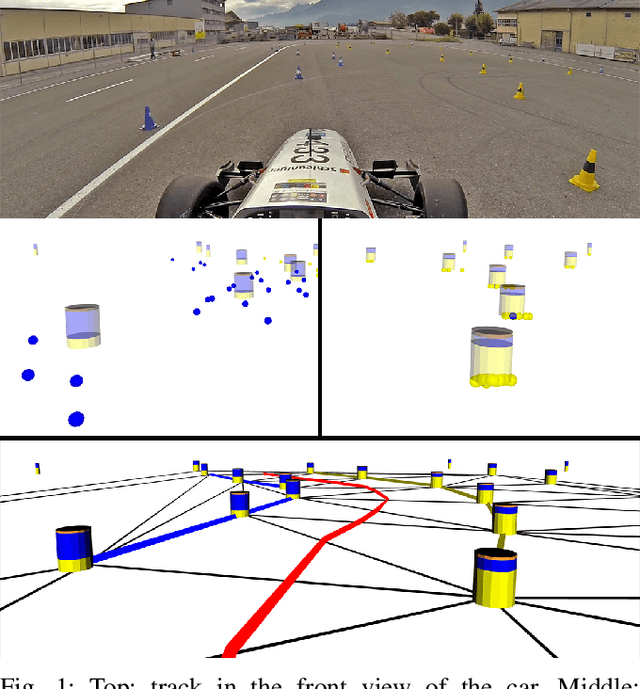
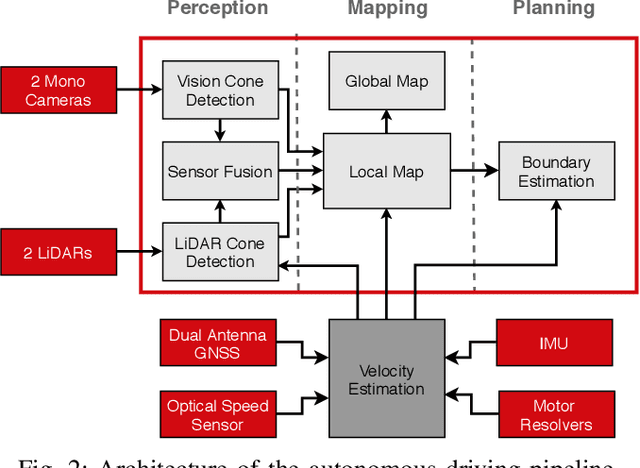
This paper presents the perception, mapping, and planning pipeline implemented on an autonomous race car. It was developed by the 2019 AMZ driverless team for the Formula Student Germany (FSG) 2019 driverless competition, where it won 1st place overall. The presented solution combines early fusion of camera and LiDAR data, a layered mapping approach, and a planning approach that uses Bayesian filtering to achieve high-speed driving on unknown race tracks while creating accurate maps. We benchmark the method against our team's previous solution, which won FSG 2018, and show improved accuracy when driving at the same speeds. Furthermore, the new pipeline makes it possible to reliably raise the maximum driving speed in unknown environments from 3~m/s to 12~m/s while still mapping with an acceptable RMSE of 0.29~m.