 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Accurate Mapping for Autonomous Racing
Mar 12, 2020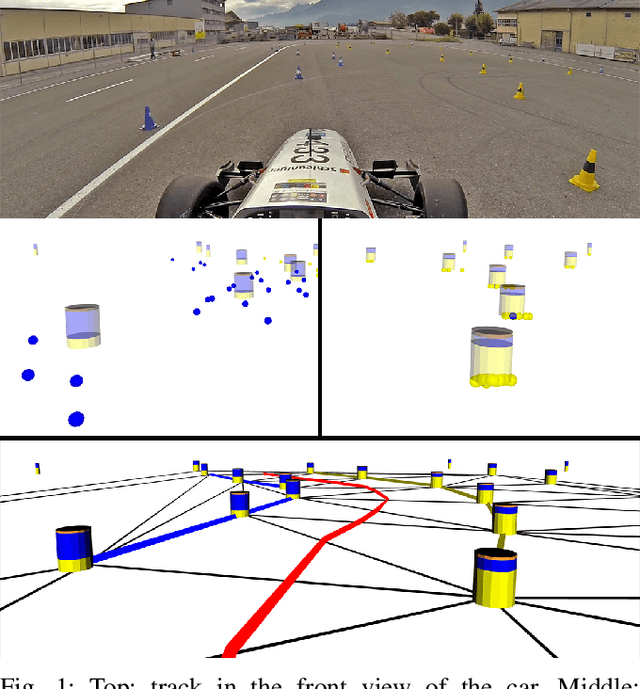
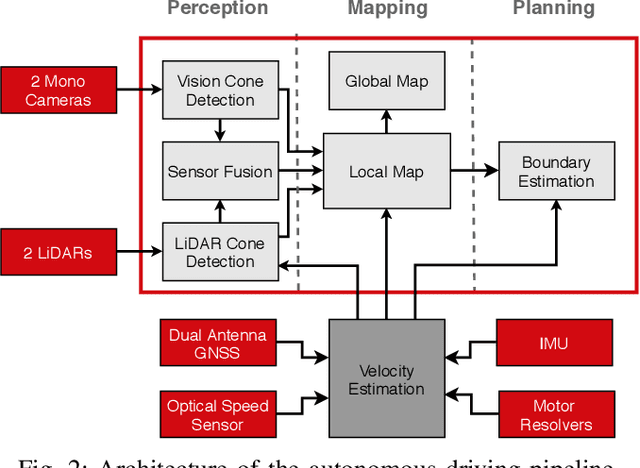
This paper presents the perception, mapping, and planning pipeline implemented on an autonomous race car. It was developed by the 2019 AMZ driverless team for the Formula Student Germany (FSG) 2019 driverless competition, where it won 1st place overall. The presented solution combines early fusion of camera and LiDAR data, a layered mapping approach, and a planning approach that uses Bayesian filtering to achieve high-speed driving on unknown race tracks while creating accurate maps. We benchmark the method against our team's previous solution, which won FSG 2018, and show improved accuracy when driving at the same speeds. Furthermore, the new pipeline makes it possible to reliably raise the maximum driving speed in unknown environments from 3~m/s to 12~m/s while still mapping with an acceptable RMSE of 0.29~m.
Project AutoVision: Localization and 3D Scene Perception for an Autonomous Vehicle with a Multi-Camera System
Mar 05, 2019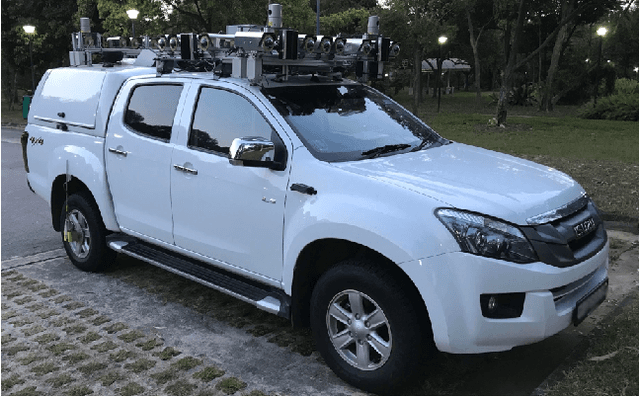
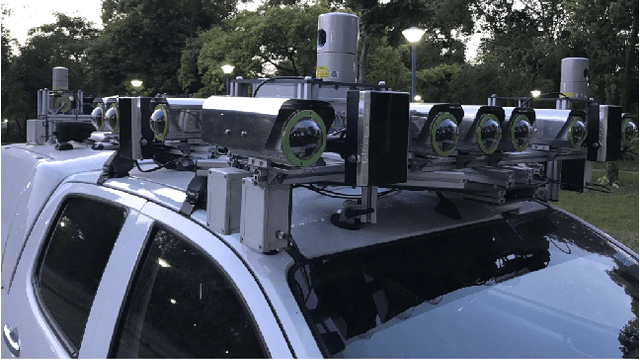

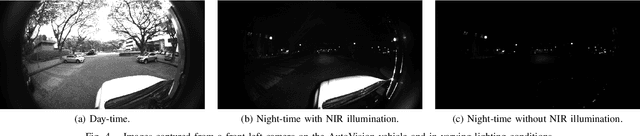
Project AutoVision aims to develop localization and 3D scene perception capabilities for a self-driving vehicle. Such capabilities will enable autonomous navigation in urban and rural environments, in day and night, and with cameras as the only exteroceptive sensors. The sensor suite employs many cameras for both 360-degree coverage and accurate multi-view stereo; the use of low-cost cameras keeps the cost of this sensor suite to a minimum. In addition, the project seeks to extend the operating envelope to include GNSS-less conditions which are typical for environments with tall buildings, foliage, and tunnels. Emphasis is placed on leveraging multi-view geometry and deep learning to enable the vehicle to localize and perceive in 3D space. This paper presents an overview of the project, and describes the sensor suite and current progress in the areas of calibration, localization, and perception.