 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProject AutoVision: Localization and 3D Scene Perception for an Autonomous Vehicle with a Multi-Camera System
Mar 05, 2019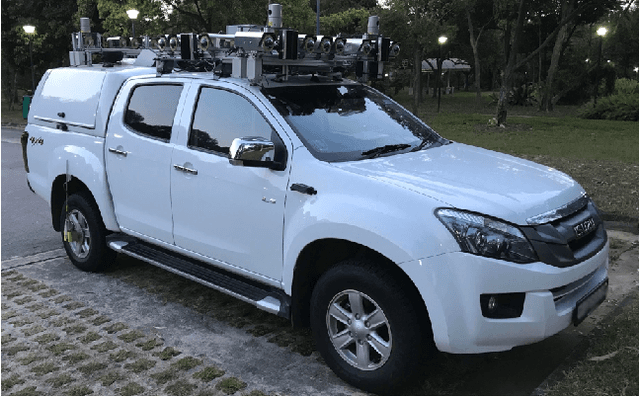
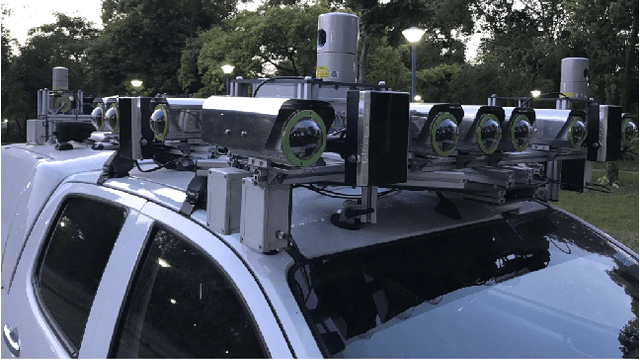

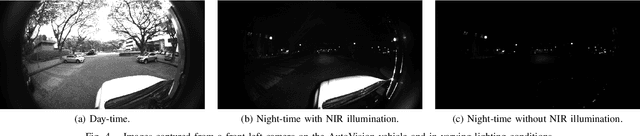
Project AutoVision aims to develop localization and 3D scene perception capabilities for a self-driving vehicle. Such capabilities will enable autonomous navigation in urban and rural environments, in day and night, and with cameras as the only exteroceptive sensors. The sensor suite employs many cameras for both 360-degree coverage and accurate multi-view stereo; the use of low-cost cameras keeps the cost of this sensor suite to a minimum. In addition, the project seeks to extend the operating envelope to include GNSS-less conditions which are typical for environments with tall buildings, foliage, and tunnels. Emphasis is placed on leveraging multi-view geometry and deep learning to enable the vehicle to localize and perceive in 3D space. This paper presents an overview of the project, and describes the sensor suite and current progress in the areas of calibration, localization, and perception.
Real-Time Dense Mapping for Self-driving Vehicles using Fisheye Cameras
Sep 17, 2018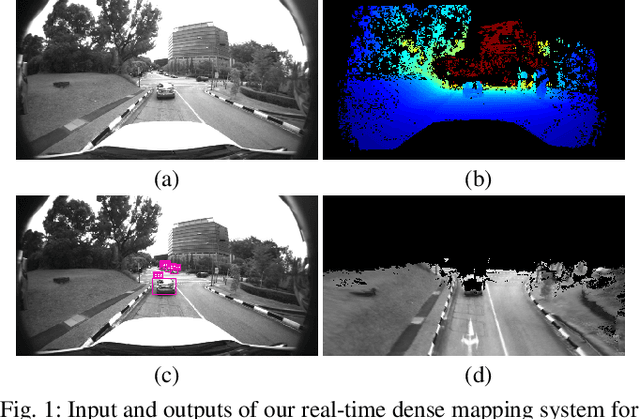
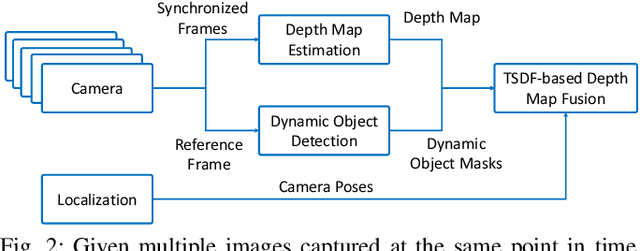

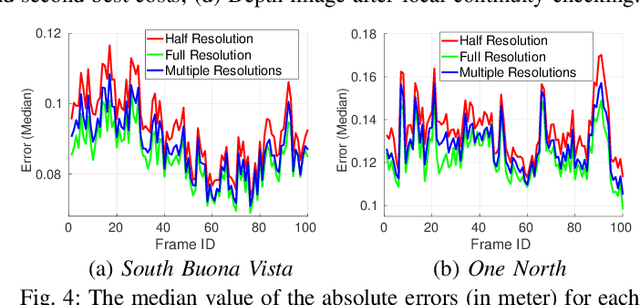
We present a real-time dense geometric mapping algorithm for large-scale environments. Unlike existing methods which use pinhole cameras, our implementation is based on fisheye cameras which have larger field of view and benefit some other tasks including Visual-Inertial Odometry, localization and object detection around vehicles. Our algorithm runs on in-vehicle PCs at 15 Hz approximately, enabling vision-only 3D scene perception for self-driving vehicles. For each synchronized set of images captured by multiple cameras, we first compute a depth map for a reference camera using plane-sweeping stereo. To maintain both accuracy and efficiency, while accounting for the fact that fisheye images have a rather low resolution, we recover the depths using multiple image resolutions. We adopt the fast object detection framework YOLOv3 to remove potentially dynamic objects. At the end of the pipeline, we fuse the fisheye depth images into the truncated signed distance function (TSDF) volume to obtain a 3D map. We evaluate our method on large-scale urban datasets, and results show that our method works well even in complex environments.