 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSegMatch: Segment based loop-closure for 3D point clouds
Jan 15, 2019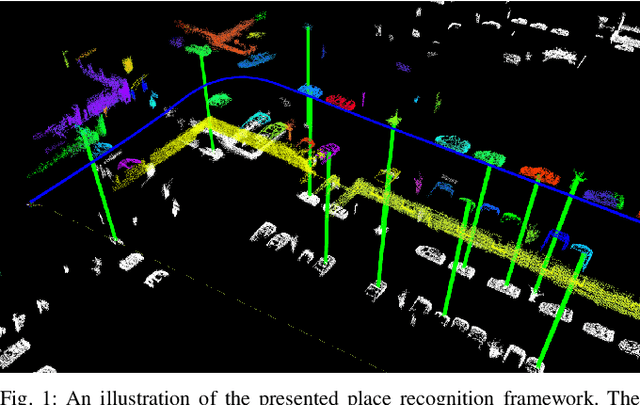
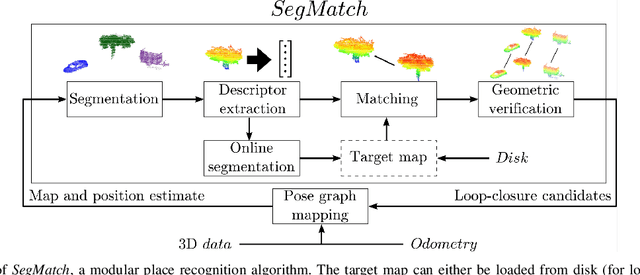
Loop-closure detection on 3D data is a challenging task that has been commonly approached by adapting image-based solutions. Methods based on local features suffer from ambiguity and from robustness to environment changes while methods based on global features are viewpoint dependent. We propose SegMatch, a reliable loop-closure detection algorithm based on the matching of 3D segments. Segments provide a good compromise between local and global descriptions, incorporating their strengths while reducing their individual drawbacks. SegMatch does not rely on assumptions of "perfect segmentation", or on the existence of "objects" in the environment, which allows for reliable execution on large scale, unstructured environments. We quantitatively demonstrate that SegMatch can achieve accurate localization at a frequency of 1Hz on the largest sequence of the KITTI odometry dataset. We furthermore show how this algorithm can reliably detect and close loops in real-time, during online operation. In addition, the source code for the SegMatch algorithm will be made available after publication.
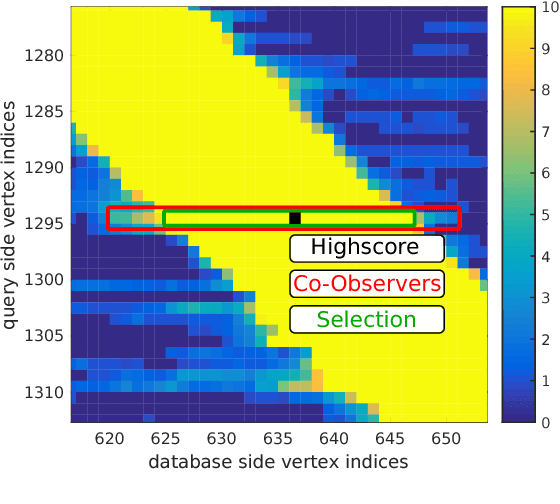
Appearance-Based Landmark Selection for Efficient Long-Term Visual Localization
Aug 08, 2018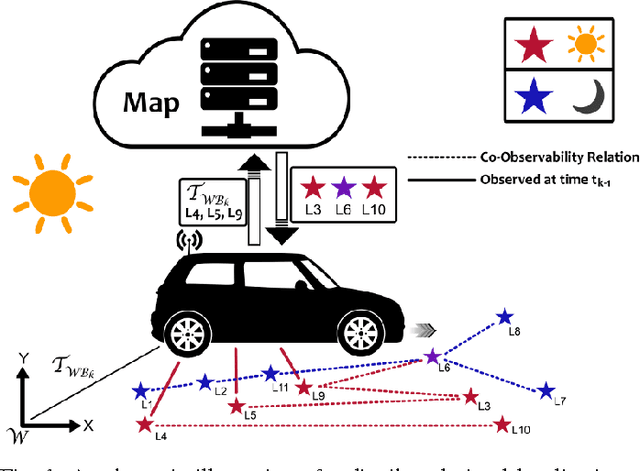
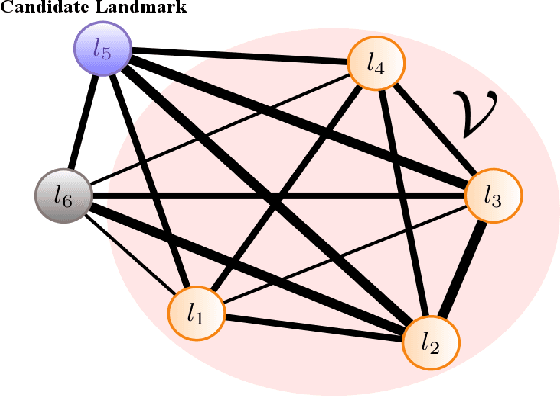
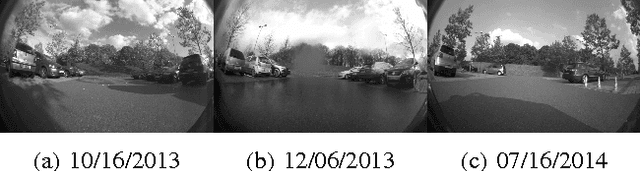
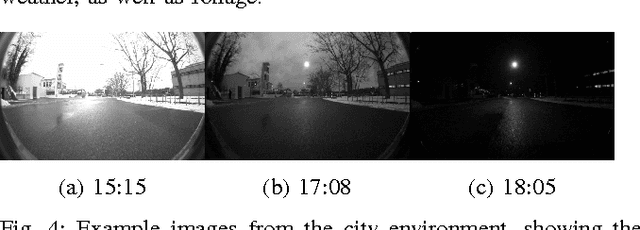
We present an online landmark selection method for distributed long-term visual localization systems in bandwidth-constrained environments. Sharing a common map for online localization provides a fleet of au- tonomous vehicles with the possibility to maintain and access a consistent map source, and therefore reduce redundancy while increasing efficiency. However, connectivity over a mobile network imposes strict bandwidth constraints and thus the need to minimize the amount of exchanged data. The wide range of varying appearance conditions encountered during long-term visual localization offers the potential to reduce data usage by extracting only those visual cues which are relevant at the given time. Motivated by this, we propose an unsupervised method of adaptively selecting landmarks according to how likely these landmarks are to be observable under the prevailing appear- ance condition. The ranking function this selection is based upon exploits landmark co-observability statistics collected in past traversals through the mapped area. Evaluation is per- formed over different outdoor environments, large time-scales and varying appearance conditions, including the extreme tran- sition from day-time to night-time, demonstrating that with our appearance-dependent selection method, we can significantly reduce the amount of landmarks used for localization while maintaining or even improving the localization performance.
Visual Place Recognition with Probabilistic Vertex Voting
Jun 07, 2018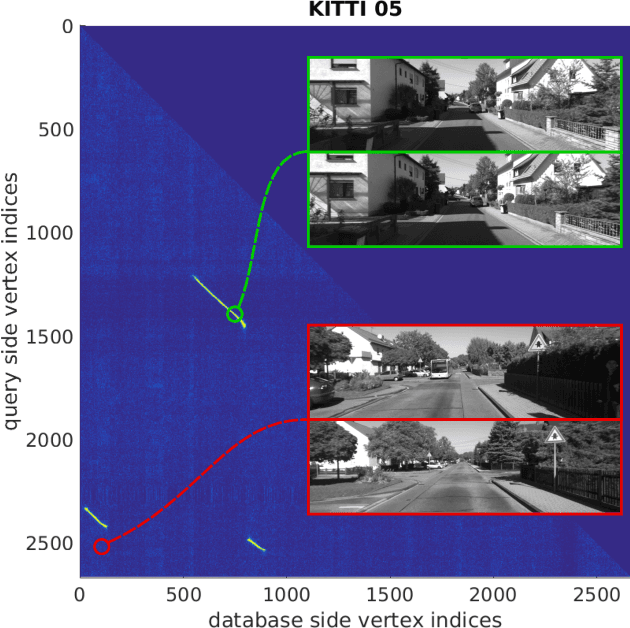
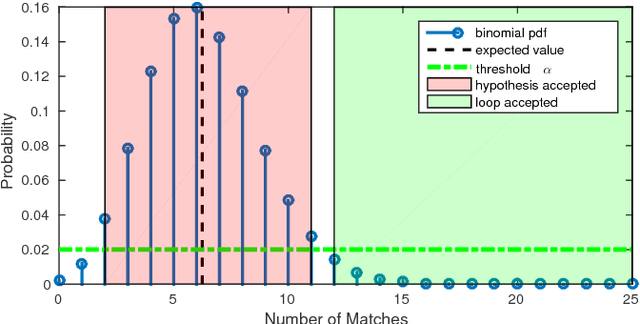
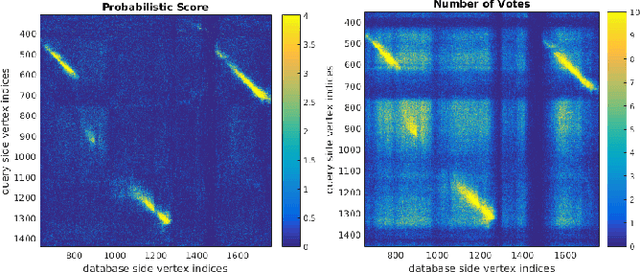
We propose a novel scoring concept for visual place recognition based on nearest neighbor descriptor voting and demonstrate how the algorithm naturally emerges from the problem formulation. Based on the observation that the number of votes for matching places can be evaluated using a binomial distribution model, loop closures can be detected with high precision. By casting the problem into a probabilistic framework, we not only remove the need for commonly employed heuristic parameters but also provide a powerful score to classify matching and non-matching places. We present methods for both a 2D-2D pose-graph vertex matching and a 2D-3D landmark matching based on the above scoring. The approach maintains accuracy while being efficient enough for online application through the use of compact (low dimensional) descriptors and fast nearest neighbor retrieval techniques. The proposed methods are evaluated on several challenging datasets in varied environments, showing state-of-the-art results with high precision and high recall.
* 8 pages