 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards learning-based planning:The nuPlan benchmark for real-world autonomous driving
Mar 07, 2024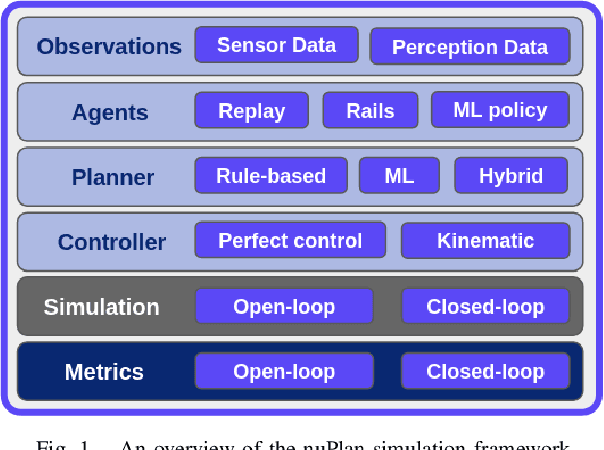
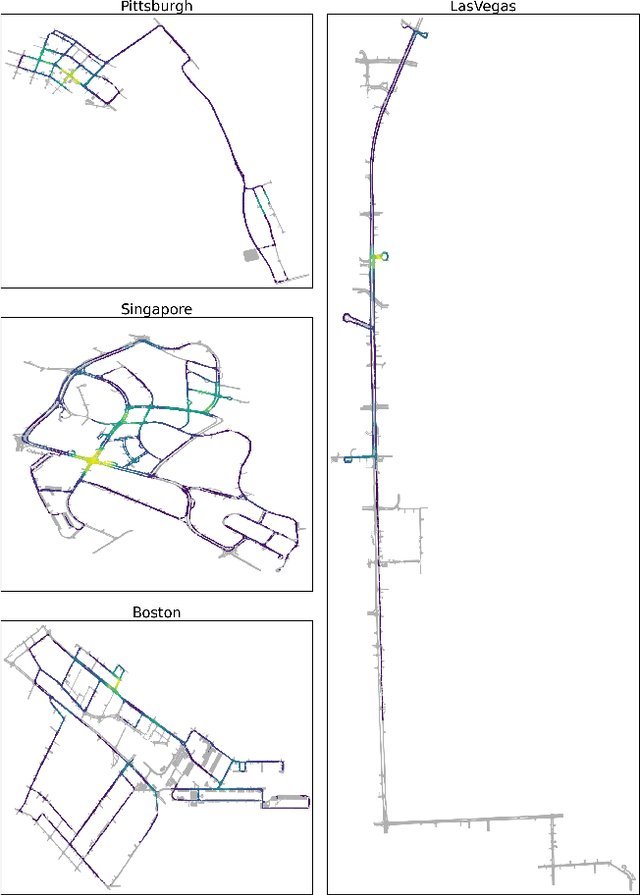
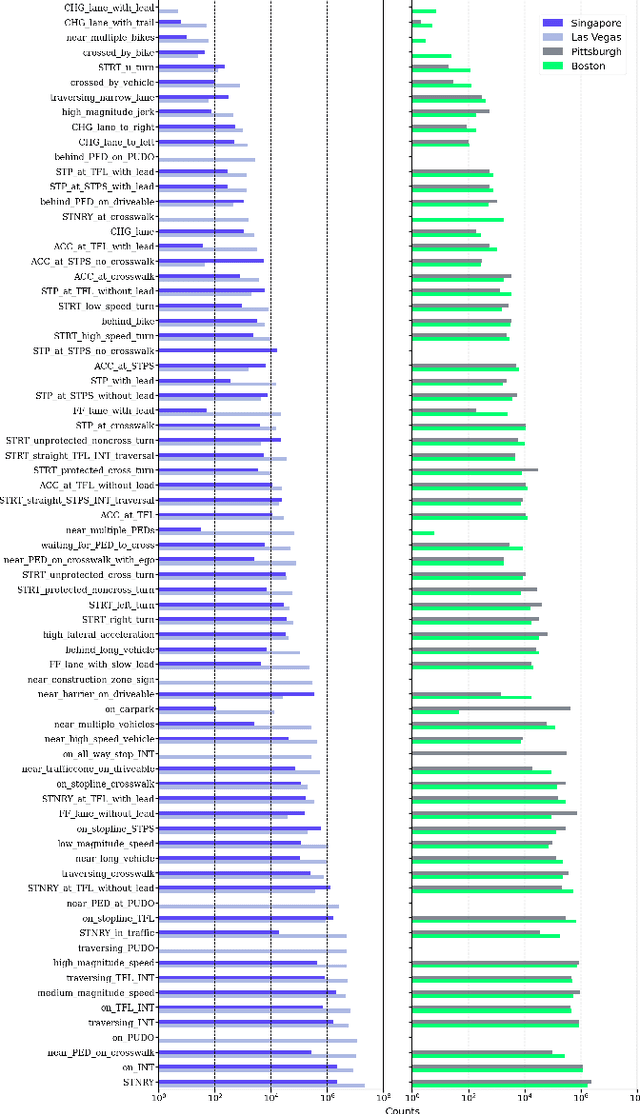
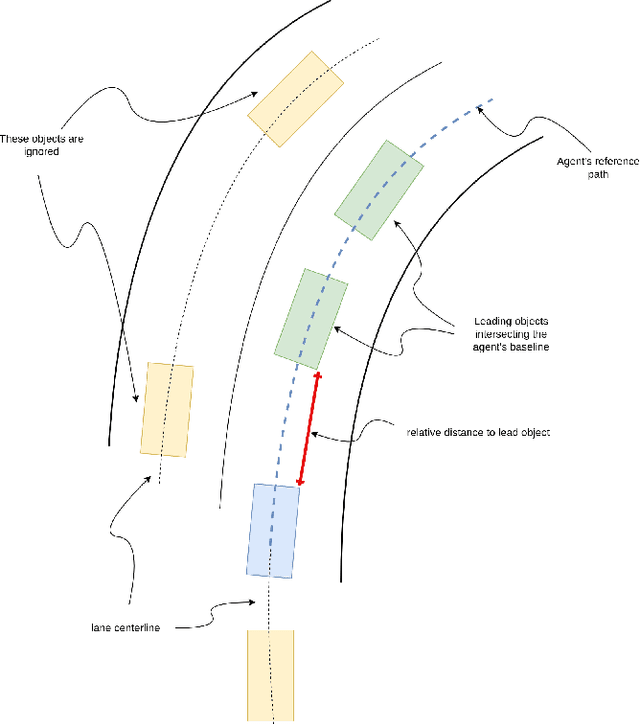
Machine Learning (ML) has replaced traditional handcrafted methods for perception and prediction in autonomous vehicles. Yet for the equally important planning task, the adoption of ML-based techniques is slow. We present nuPlan, the world's first real-world autonomous driving dataset, and benchmark. The benchmark is designed to test the ability of ML-based planners to handle diverse driving situations and to make safe and efficient decisions. To that end, we introduce a new large-scale dataset that consists of 1282 hours of diverse driving scenarios from 4 cities (Las Vegas, Boston, Pittsburgh, and Singapore) and includes high-quality auto-labeled object tracks and traffic light data. We exhaustively mine and taxonomize common and rare driving scenarios which are used during evaluation to get fine-grained insights into the performance and characteristics of a planner. Beyond the dataset, we provide a simulation and evaluation framework that enables a planner's actions to be simulated in closed-loop to account for interactions with other traffic participants. We present a detailed analysis of numerous baselines and investigate gaps between ML-based and traditional methods. Find the nuPlan dataset and code at nuplan.org.
The Reasonable Crowd: Towards evidence-based and interpretable models of driving behavior
Jul 28, 2021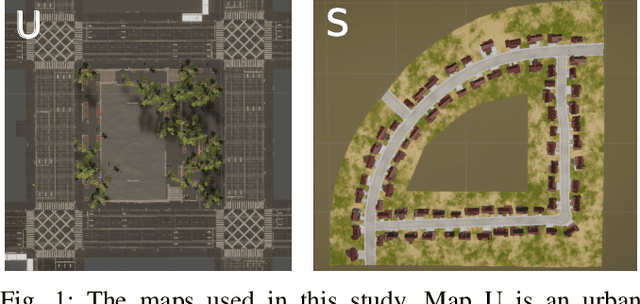
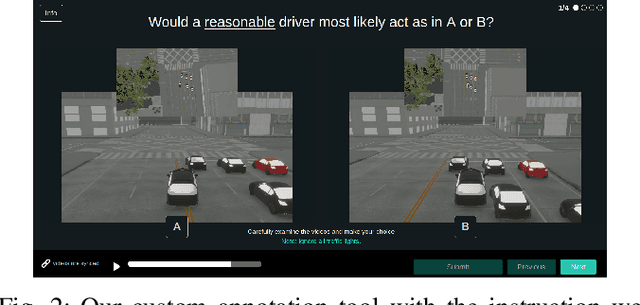
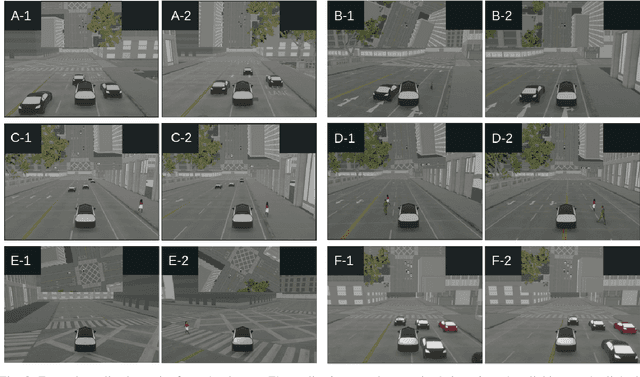
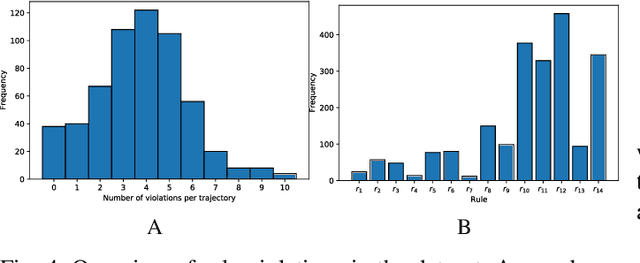
Autonomous vehicles must balance a complex set of objectives. There is no consensus on how they should do so, nor on a model for specifying a desired driving behavior. We created a dataset to help address some of these questions in a limited operating domain. The data consists of 92 traffic scenarios, with multiple ways of traversing each scenario. Multiple annotators expressed their preference between pairs of scenario traversals. We used the data to compare an instance of a rulebook, carefully hand-crafted independently of the dataset, with several interpretable machine learning models such as Bayesian networks, decision trees, and logistic regression trained on the dataset. To compare driving behavior, these models use scores indicating by how much different scenario traversals violate each of 14 driving rules. The rules are interpretable and designed by subject-matter experts. First, we found that these rules were enough for these models to achieve a high classification accuracy on the dataset. Second, we found that the rulebook provides high interpretability without excessively sacrificing performance. Third, the data pointed to possible improvements in the rulebook and the rules, and to potential new rules. Fourth, we explored the interpretability vs performance trade-off by also training non-interpretable models such as a random forest. Finally, we make the dataset publicly available to encourage a discussion from the wider community on behavior specification for AVs. Please find it at github.com/bassam-motional/Reasonable-Crowd.
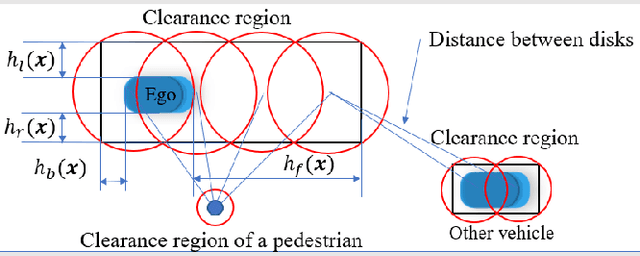
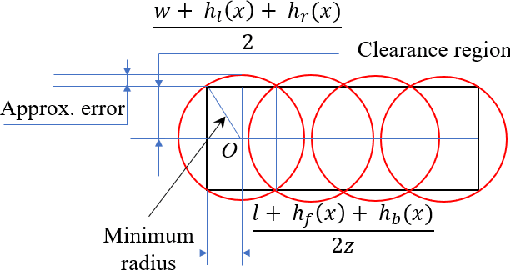
Rule-based Evaluation and Optimal Control for Autonomous Driving
Jul 15, 2021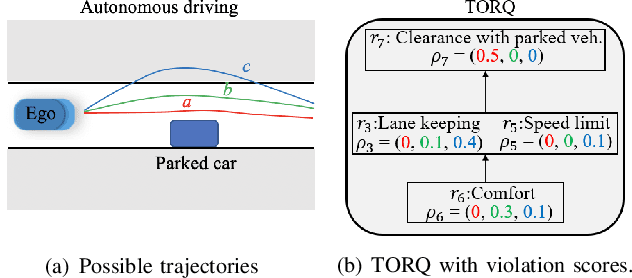
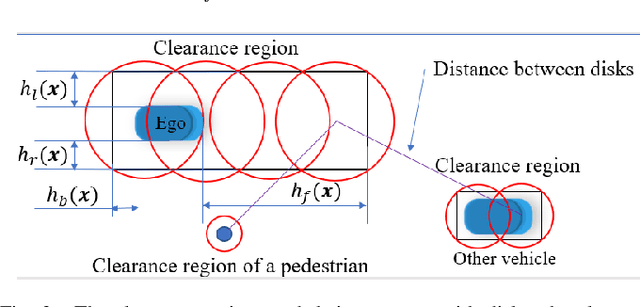
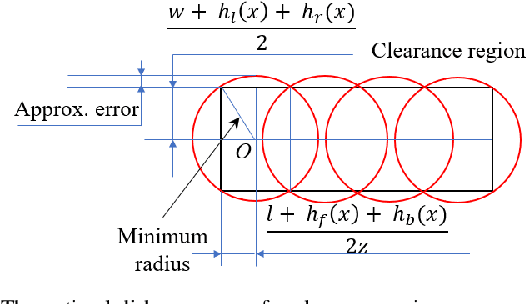
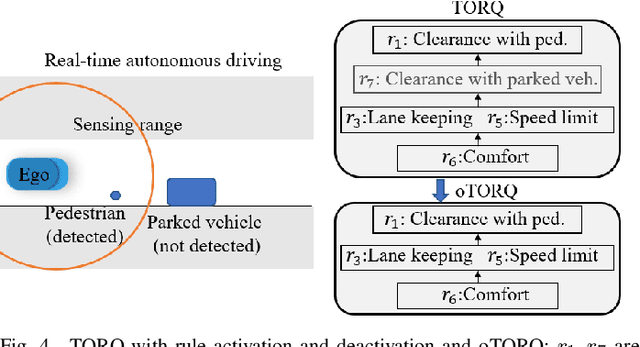
We develop optimal control strategies for autonomous vehicles (AVs) that are required to meet complex specifications imposed as rules of the road (ROTR) and locally specific cultural expectations of reasonable driving behavior. We formulate these specifications as rules, and specify their priorities by constructing a priority structure, called \underline{T}otal \underline{OR}der over e\underline{Q}uivalence classes (TORQ). We propose a recursive framework, in which the satisfaction of the rules in the priority structure are iteratively relaxed in reverse order of priority. Central to this framework is an optimal control problem, where convergence to desired states is achieved using Control Lyapunov Functions (CLFs) and clearance with other road users is enforced through Control Barrier Functions (CBFs). We present offline and online approaches to this problem. In the latter, the AV has limited sensing range that affects the activation of the rules, and the control is generated using a receding horizon (Model Predictive Control, MPC) approach. We also show how the offline method can be used for after-the-fact (offline) pass/fail evaluation of trajectories - a given trajectory is rejected if we can find a controller producing a trajectory that leads to less violation of the rule priority structure. We present case studies with multiple driving scenarios to demonstrate the effectiveness of the algorithms, and to compare the offline and online versions of our proposed framework.
Neural Network-based Control for Multi-Agent Systems from Spatio-Temporal Specifications
Apr 06, 2021
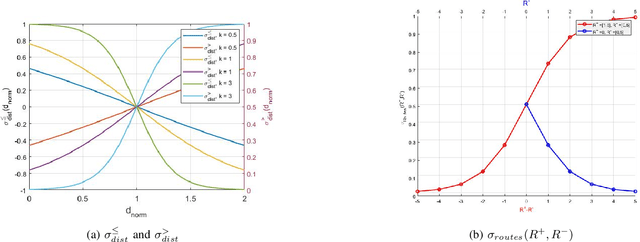
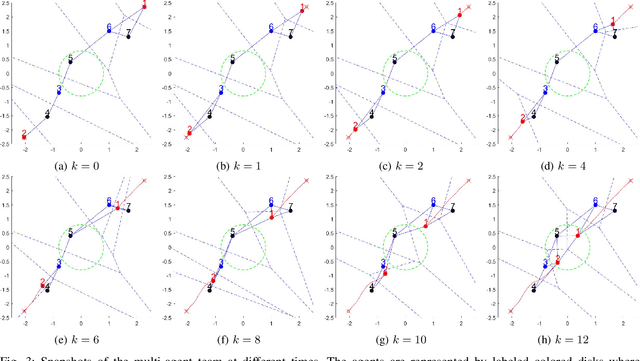
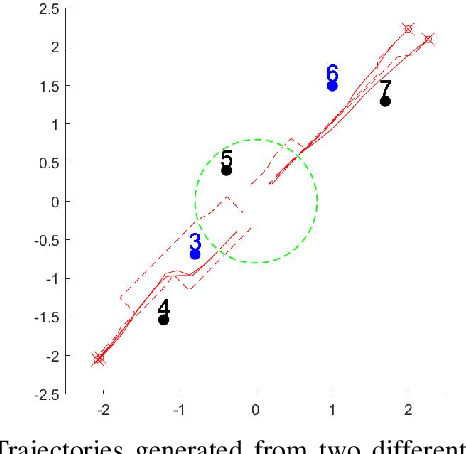
We propose a framework for solving control synthesis problems for multi-agent networked systems required to satisfy spatio-temporal specifications. We use Spatio-Temporal Reach and Escape Logic (STREL) as a specification language. For this logic, we define smooth quantitative semantics, which captures the degree of satisfaction of a formula by a multi-agent team. We use the novel quantitative semantics to map control synthesis problems with STREL specifications to optimization problems and propose a combination of heuristic and gradient-based methods to solve such problems. As this method might not meet the requirements of a real-time implementation, we develop a machine learning technique that uses the results of the off-line optimizations to train a neural network that gives the control inputs at current states. We illustrate the effectiveness of the proposed framework by applying it to a model of a robotic team required to satisfy a spatial-temporal specification under communication constraints.
Rule-based Optimal Control for Autonomous Driving
Jan 14, 2021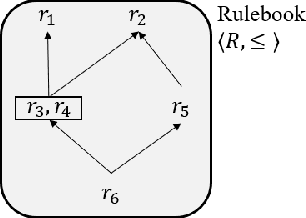
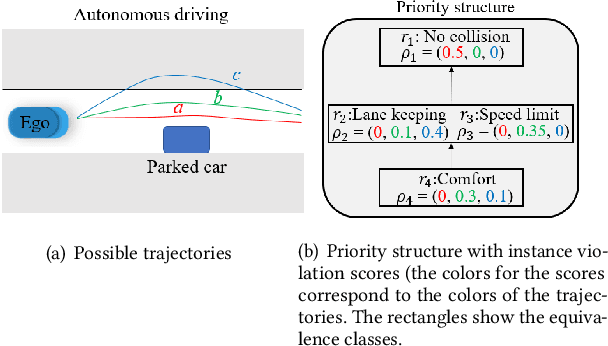
We develop optimal control strategies for Autonomous Vehicles (AVs) that are required to meet complex specifications imposed by traffic laws and cultural expectations of reasonable driving behavior. We formulate these specifications as rules, and specify their priorities by constructing a priority structure. We propose a recursive framework, in which the satisfaction of the rules in the priority structure are iteratively relaxed based on their priorities. Central to this framework is an optimal control problem, where convergence to desired states is achieved using Control Lyapunov Functions (CLFs), and safety is enforced through Control Barrier Functions (CBFs). We also show how the proposed framework can be used for after-the-fact, pass / fail evaluation of trajectories - a given trajectory is rejected if we can find a controller producing a trajectory that leads to less violation of the rule priority structure. We present case studies with multiple driving scenarios to demonstrate the effectiveness of the proposed framework.
Recurrent Neural Network Controllers for Signal Temporal Logic Specifications Subject to Safety Constraints
Sep 24, 2020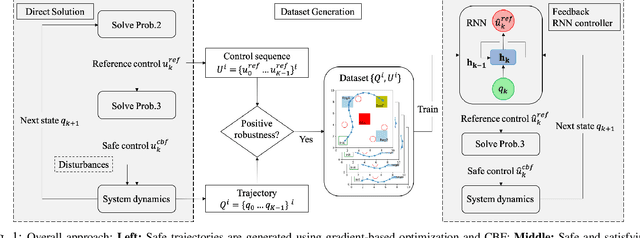
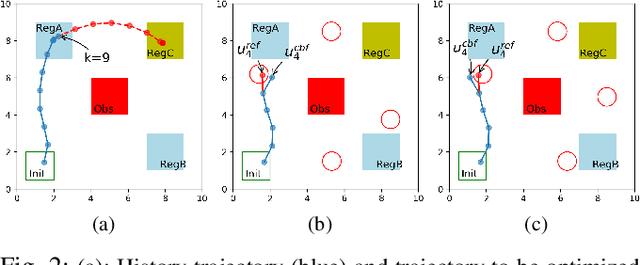
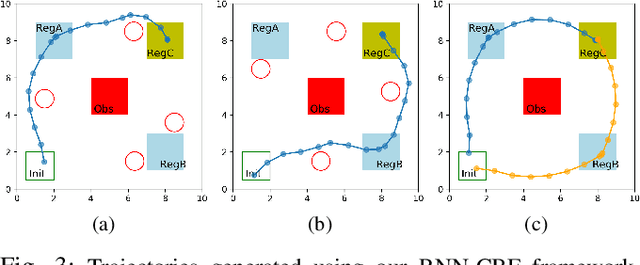
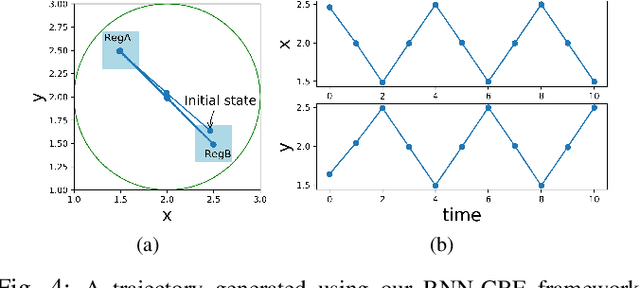
We propose a framework based on Recurrent Neural Networks (RNNs) to determine an optimal control strategy for a discrete-time system that is required to satisfy specifications given as Signal Temporal Logic (STL) formulae. RNNs can store information of a system over time, thus, enable us to determine satisfaction of the dynamic temporal requirements specified in STL formulae. Given a STL formula, a dataset of satisfying system executions and corresponding control policies, we can use RNNs to predict a control policy at each time based on the current and previous states of system. We use Control Barrier Functions (CBFs) to guarantee the safety of the predicted control policy. We validate our theoretical formulation and demonstrate its performance in an optimal control problem subject to partially unknown safety constraints through simulations.
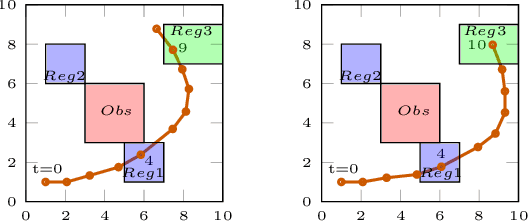
Average-based Robustness for Continuous-Time Signal Temporal Logic
Sep 03, 2019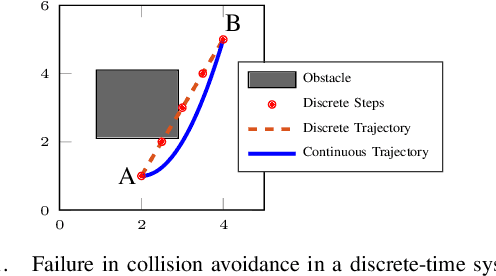
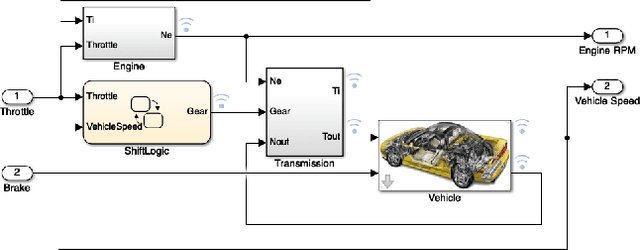
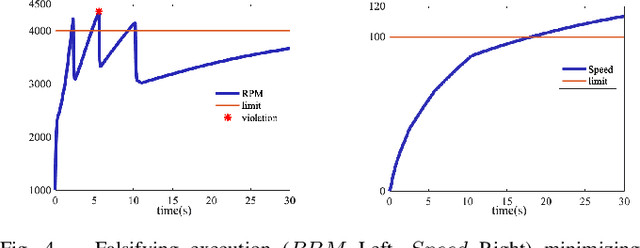
We propose a new robustness score for continuous-time Signal Temporal Logic (STL) specifications. Instead of considering only the most severe point along the evolution of the signal, we use average scores to extract more information from the signal, emphasizing robust satisfaction of all the specifications' subformulae over their entire time interval domains. We demonstrate the advantages of this new score in falsification and control synthesis problems in systems with complex dynamics and multi-agent systems.
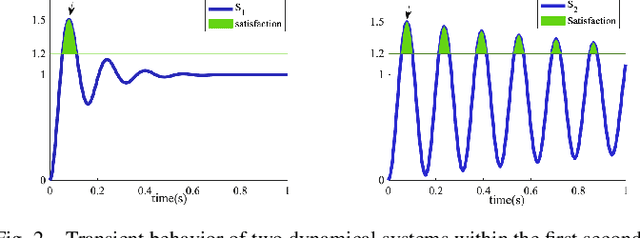
Arithmetic-Geometric Mean Robustness for Control from Signal Temporal Logic Specifications
Mar 12, 2019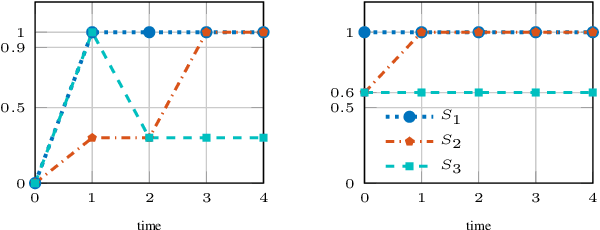
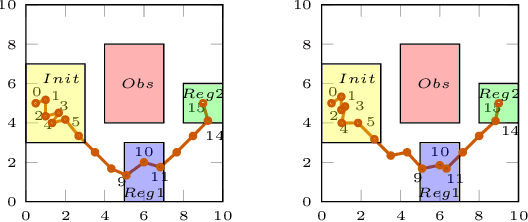
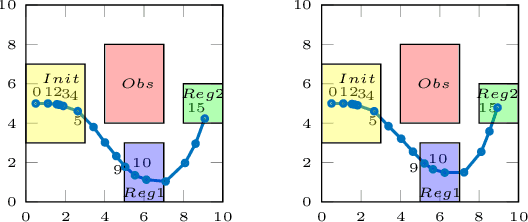
We present a new average-based robustness score for Signal Temporal Logic (STL) and a framework for optimal control of a dynamical system under STL constraints. By averaging the scores of different specifications or subformulae at different time points, our new definition highlights the frequency of satisfaction, as well as how robustly each specification is satisfied at each time point. We show that this definition provides a better score for how well a specification is satisfied. Its usefulness in monitoring and control synthesis problems is illustrated through case studies.