 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning for Control of Rolling ubots
Dec 01, 2022



Micron-scale robots (ubots) have recently shown great promise for emerging medical applications, and accurate control of ubots is a critical next step to deploying them in real systems. In this work, we develop the idea of a nonlinear mismatch controller to compensate for the mismatch between the disturbed unicycle model of a rolling ubot and trajectory data collected during an experiment. We exploit the differential flatness property of the rolling ubot model to generate a mapping from the desired state trajectory to nominal control actions. Due to model mismatch and parameter estimation error, the nominal control actions will not exactly reproduce the desired state trajectory. We employ a Gaussian Process (GP) to learn the model mismatch as a function of the desired control actions, and correct the nominal control actions using a least-squares optimization. We demonstrate the performance of our online learning algorithm in simulation, where we show that the model mismatch makes some desired states unreachable. Finally, we validate our approach in an experiment and show that the error metrics are reduced by up to 40%.
Learning Spatio-Temporal Specifications for Dynamical Systems
Dec 20, 2021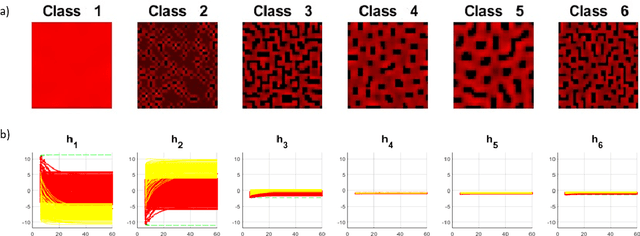
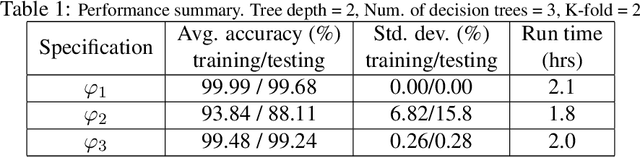

Learning dynamical systems properties from data provides important insights that help us understand such systems and mitigate undesired outcomes. In this work, we propose a framework for learning spatio-temporal (ST) properties as formal logic specifications from data. We introduce SVM-STL, an extension of Signal Signal Temporal Logic (STL), capable of specifying spatial and temporal properties of a wide range of dynamical systems that exhibit time-varying spatial patterns. Our framework utilizes machine learning techniques to learn SVM-STL specifications from system executions given by sequences of spatial patterns. We present methods to deal with both labeled and unlabeled data. In addition, given system requirements in the form of SVM-STL specifications, we provide an approach for parameter synthesis to find parameters that maximize the satisfaction of such specifications. Our learning framework and parameter synthesis approach are showcased in an example of a reaction-diffusion system.
Neural Network-based Control for Multi-Agent Systems from Spatio-Temporal Specifications
Apr 06, 2021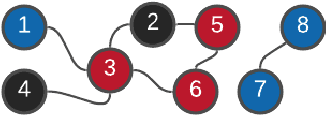
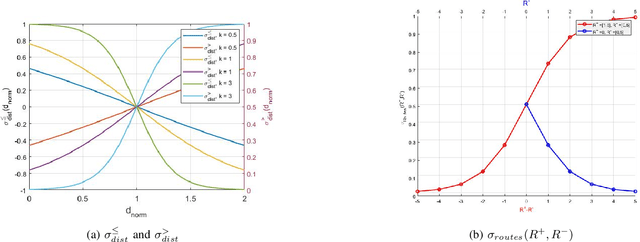
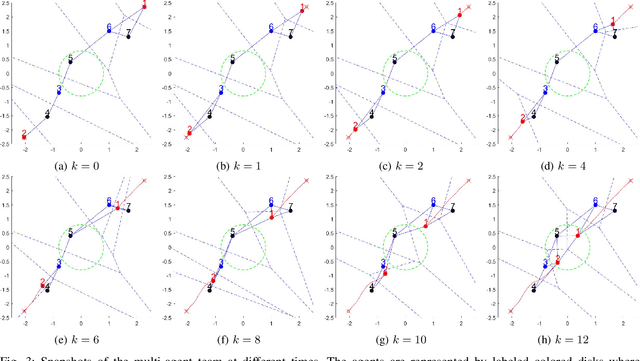
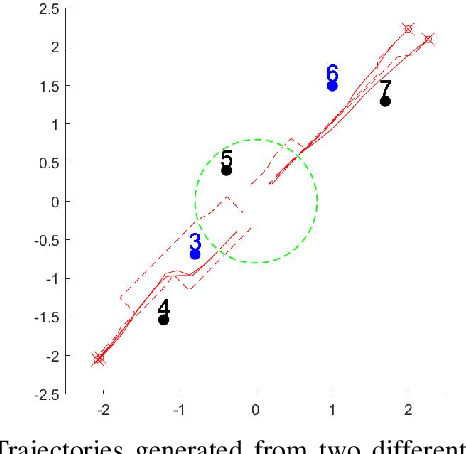
We propose a framework for solving control synthesis problems for multi-agent networked systems required to satisfy spatio-temporal specifications. We use Spatio-Temporal Reach and Escape Logic (STREL) as a specification language. For this logic, we define smooth quantitative semantics, which captures the degree of satisfaction of a formula by a multi-agent team. We use the novel quantitative semantics to map control synthesis problems with STREL specifications to optimization problems and propose a combination of heuristic and gradient-based methods to solve such problems. As this method might not meet the requirements of a real-time implementation, we develop a machine learning technique that uses the results of the off-line optimizations to train a neural network that gives the control inputs at current states. We illustrate the effectiveness of the proposed framework by applying it to a model of a robotic team required to satisfy a spatial-temporal specification under communication constraints.