 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Vision-Based Magnetic Microrobotic Pushing of Micro-Objects and Cells
May 09, 2025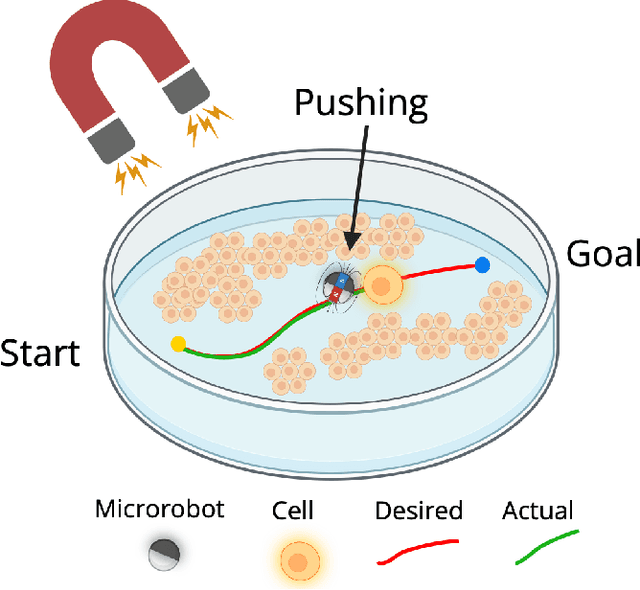
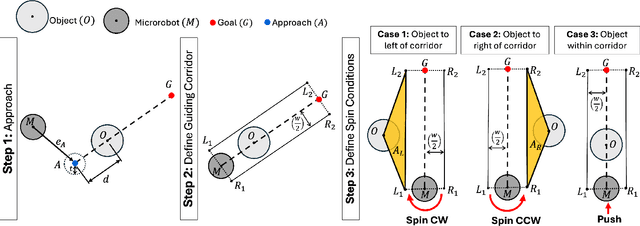
Accurate and autonomous transportation of micro-objects and biological cells can enable significant advances in a wide variety of research disciplines. Here, we present a novel, vision-based, model-free microrobotic pushing algorithm for the autonomous manipulation of micro objects and biological cells. The algorithm adjusts the axis of a rotating magnetic field that in turn controls the heading angle and spin axis of a spherical Janus rolling microrobot. We introduce the concept of a microrobotic guiding corridor to constrain the object and to avoid pushing failures. We then show that employing only two simple conditions, the microrobot is able to successfully and autonomously push microscale objects along predefined trajectories. We evaluate the performance of the algorithm by measuring the mean absolute error and completion time relative to a desired path at different actuation frequencies and guiding corridor widths. Finally, we demonstrate biomedical applicability by autonomously transporting a single biological cell, highlighting the methods potential for applications in tissue engineering, drug delivery and synthetic biology.
Control of Microrobots Using Model Predictive Control and Gaussian Processes for Disturbance Estimation
Jun 04, 2024



This paper presents a control framework for magnetically actuated micron-scale robots ($\mu$bots) designed to mitigate disturbances and improve trajectory tracking. To address the challenges posed by unmodeled dynamics and environmental variability, we combine data-driven modeling with model-based control to accurately track desired trajectories using a relatively small amount of data. The system is represented with a simple linear model, and Gaussian Processes (GP) are employed to capture and estimate disturbances. This disturbance-enhanced model is then integrated into a Model Predictive Controller (MPC). Our approach demonstrates promising performance in both simulation and experimental setups, showcasing its potential for precise and reliable microrobot control in complex environments.
Learning for Control of Rolling ubots
Dec 01, 2022



Micron-scale robots (ubots) have recently shown great promise for emerging medical applications, and accurate control of ubots is a critical next step to deploying them in real systems. In this work, we develop the idea of a nonlinear mismatch controller to compensate for the mismatch between the disturbed unicycle model of a rolling ubot and trajectory data collected during an experiment. We exploit the differential flatness property of the rolling ubot model to generate a mapping from the desired state trajectory to nominal control actions. Due to model mismatch and parameter estimation error, the nominal control actions will not exactly reproduce the desired state trajectory. We employ a Gaussian Process (GP) to learn the model mismatch as a function of the desired control actions, and correct the nominal control actions using a least-squares optimization. We demonstrate the performance of our online learning algorithm in simulation, where we show that the model mismatch makes some desired states unreachable. Finally, we validate our approach in an experiment and show that the error metrics are reduced by up to 40%.
Learning Spatio-Temporal Specifications for Dynamical Systems
Dec 20, 2021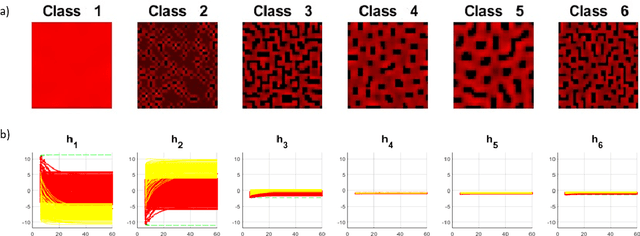
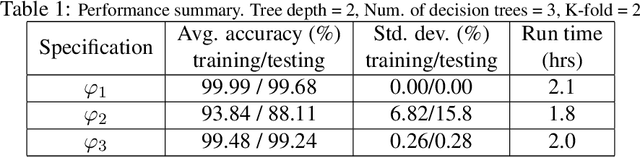

Learning dynamical systems properties from data provides important insights that help us understand such systems and mitigate undesired outcomes. In this work, we propose a framework for learning spatio-temporal (ST) properties as formal logic specifications from data. We introduce SVM-STL, an extension of Signal Signal Temporal Logic (STL), capable of specifying spatial and temporal properties of a wide range of dynamical systems that exhibit time-varying spatial patterns. Our framework utilizes machine learning techniques to learn SVM-STL specifications from system executions given by sequences of spatial patterns. We present methods to deal with both labeled and unlabeled data. In addition, given system requirements in the form of SVM-STL specifications, we provide an approach for parameter synthesis to find parameters that maximize the satisfaction of such specifications. Our learning framework and parameter synthesis approach are showcased in an example of a reaction-diffusion system.
Scikit-learn: Machine Learning in Python
Jun 05, 2018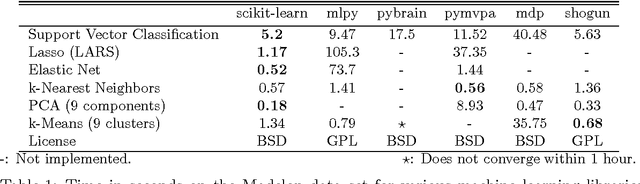
Scikit-learn is a Python module integrating a wide range of state-of-the-art machine learning algorithms for medium-scale supervised and unsupervised problems. This package focuses on bringing machine learning to non-specialists using a general-purpose high-level language. Emphasis is put on ease of use, performance, documentation, and API consistency. It has minimal dependencies and is distributed under the simplified BSD license, encouraging its use in both academic and commercial settings. Source code, binaries, and documentation can be downloaded from http://scikit-learn.org.
* Update authors list and URLs
Affinity Weighted Embedding
Jan 17, 2013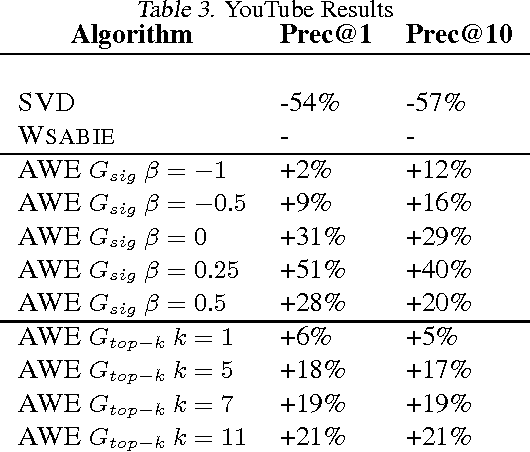
Supervised (linear) embedding models like Wsabie and PSI have proven successful at ranking, recommendation and annotation tasks. However, despite being scalable to large datasets they do not take full advantage of the extra data due to their linear nature, and typically underfit. We propose a new class of models which aim to provide improved performance while retaining many of the benefits of the existing class of embedding models. Our new approach works by iteratively learning a linear embedding model where the next iteration's features and labels are reweighted as a function of the previous iteration. We describe several variants of the family, and give some initial results.
Latent Collaborative Retrieval
Jun 18, 2012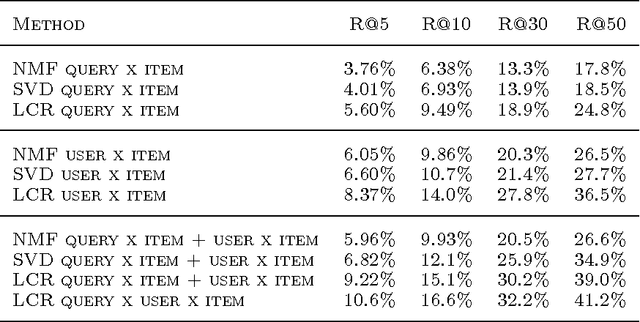

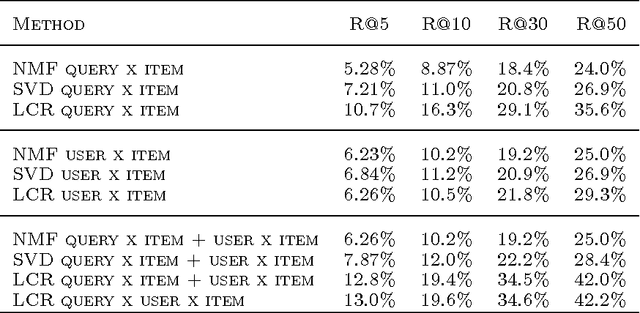
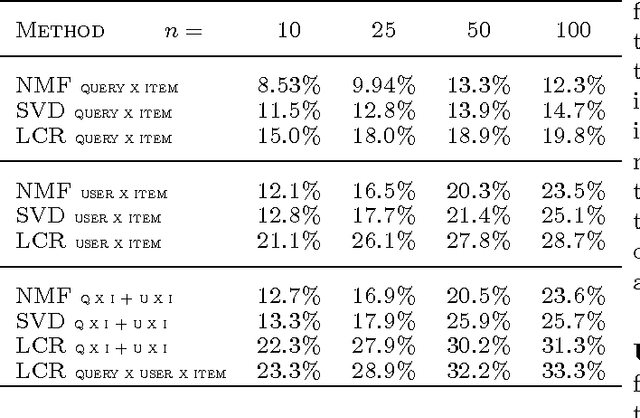
Retrieval tasks typically require a ranking of items given a query. Collaborative filtering tasks, on the other hand, learn to model user's preferences over items. In this paper we study the joint problem of recommending items to a user with respect to a given query, which is a surprisingly common task. This setup differs from the standard collaborative filtering one in that we are given a query x user x item tensor for training instead of the more traditional user x item matrix. Compared to document retrieval we do have a query, but we may or may not have content features (we will consider both cases) and we can also take account of the user's profile. We introduce a factorized model for this new task that optimizes the top-ranked items returned for the given query and user. We report empirical results where it outperforms several baselines.