 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScenicRules: An Autonomous Driving Benchmark with Multi-Objective Specifications and Abstract Scenarios
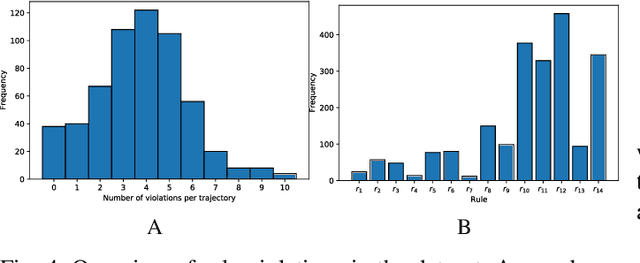
Feb 17, 2026Developing autonomous driving systems for complex traffic environments requires balancing multiple objectives, such as avoiding collisions, obeying traffic rules, and making efficient progress. In many situations, these objectives cannot be satisfied simultaneously, and explicit priority relations naturally arise. Also, driving rules require context, so it is important to formally model the environment scenarios within which such rules apply. Existing benchmarks for evaluating autonomous vehicles lack such combinations of multi-objective prioritized rules and formal environment models. In this work, we introduce ScenicRules, a benchmark for evaluating autonomous driving systems in stochastic environments under prioritized multi-objective specifications. We first formalize a diverse set of objectives to serve as quantitative evaluation metrics. Next, we design a Hierarchical Rulebook framework that encodes multiple objectives and their priority relations in an interpretable and adaptable manner. We then construct a compact yet representative collection of scenarios spanning diverse driving contexts and near-accident situations, formally modeled in the Scenic language. Experimental results show that our formalized objectives and Hierarchical Rulebooks align well with human driving judgments and that our benchmark effectively exposes agent failures with respect to the prioritized objectives. Our benchmark can be accessed at https://github.com/BerkeleyLearnVerify/ScenicRules/.
Incorporating System-level Safety Requirements in Perception Models via Reinforcement Learning
Dec 04, 2024



Perception components in autonomous systems are often developed and optimized independently of downstream decision-making and control components, relying on established performance metrics like accuracy, precision, and recall. Traditional loss functions, such as cross-entropy loss and negative log-likelihood, focus on reducing misclassification errors but fail to consider their impact on system-level safety, overlooking the varying severities of system-level failures caused by these errors. To address this limitation, we propose a novel training paradigm that augments the perception component with an understanding of system-level safety objectives. Central to our approach is the translation of system-level safety requirements, formally specified using the rulebook formalism, into safety scores. These scores are then incorporated into the reward function of a reinforcement learning framework for fine-tuning perception models with system-level safety objectives. Simulation results demonstrate that models trained with this approach outperform baseline perception models in terms of system-level safety.
GENESIS-RL: GEnerating Natural Edge-cases with Systematic Integration of Safety considerations and Reinforcement Learning
Mar 27, 2024



In the rapidly evolving field of autonomous systems, the safety and reliability of the system components are fundamental requirements. These components are often vulnerable to complex and unforeseen environments, making natural edge-case generation essential for enhancing system resilience. This paper presents GENESIS-RL, a novel framework that leverages system-level safety considerations and reinforcement learning techniques to systematically generate naturalistic edge cases. By simulating challenging conditions that mimic the real-world situations, our framework aims to rigorously test entire system's safety and reliability. Although demonstrated within the autonomous driving application, our methodology is adaptable across diverse autonomous systems. Our experimental validation, conducted on high-fidelity simulator underscores the overall effectiveness of this framework.
Formal Methods for Autonomous Systems
Nov 02, 2023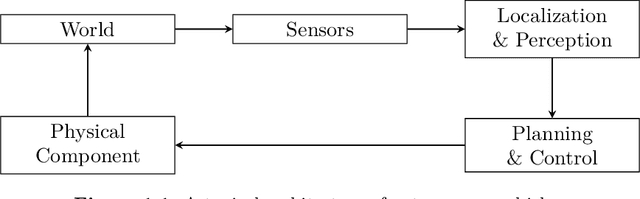
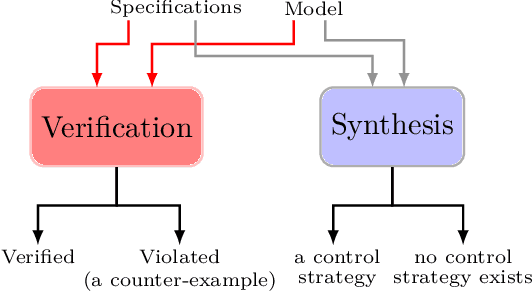
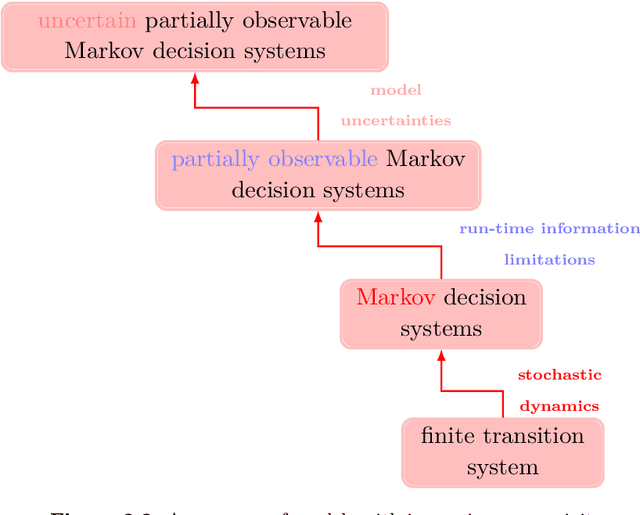
Formal methods refer to rigorous, mathematical approaches to system development and have played a key role in establishing the correctness of safety-critical systems. The main building blocks of formal methods are models and specifications, which are analogous to behaviors and requirements in system design and give us the means to verify and synthesize system behaviors with formal guarantees. This monograph provides a survey of the current state of the art on applications of formal methods in the autonomous systems domain. We consider correct-by-construction synthesis under various formulations, including closed systems, reactive, and probabilistic settings. Beyond synthesizing systems in known environments, we address the concept of uncertainty and bound the behavior of systems that employ learning using formal methods. Further, we examine the synthesis of systems with monitoring, a mitigation technique for ensuring that once a system deviates from expected behavior, it knows a way of returning to normalcy. We also show how to overcome some limitations of formal methods themselves with learning. We conclude with future directions for formal methods in reinforcement learning, uncertainty, privacy, explainability of formal methods, and regulation and certification.
Evaluation Metrics for Object Detection for Autonomous Systems
Oct 19, 2022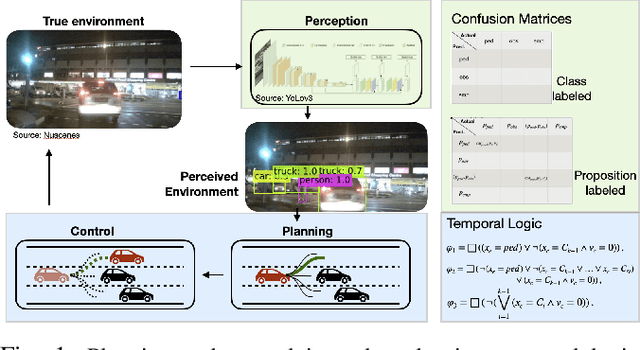
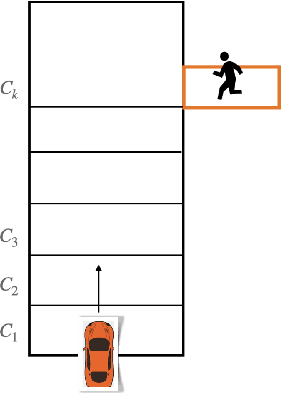
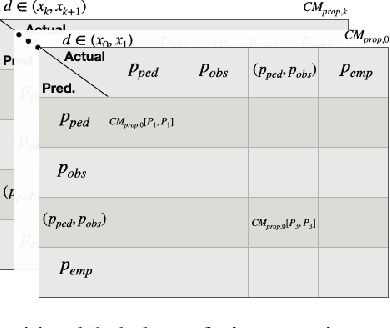
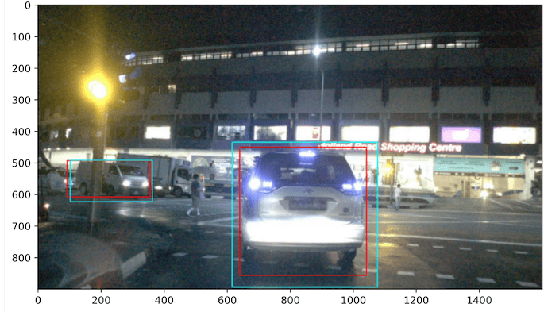
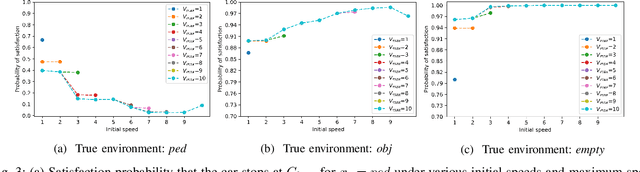
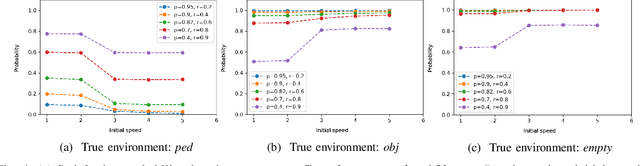
This paper studies the evaluation of learning-based object detection models in conjunction with model-checking of formal specifications defined on an abstract model of an autonomous system and its environment. In particular, we define two metrics -- \emph{proposition-labeled} and \emph{class-labeled} confusion matrices -- for evaluating object detection, and we incorporate these metrics to compute the satisfaction probability of system-level safety requirements. While confusion matrices have been effective for comparative evaluation of classification and object detection models, our framework fills two key gaps. First, we relate the performance of object detection to formal requirements defined over downstream high-level planning tasks. In particular, we provide empirical results that show that the choice of a good object detection algorithm, with respect to formal requirements on the overall system, significantly depends on the downstream planning and control design. Secondly, unlike the traditional confusion matrix, our metrics account for variations in performance with respect to the distance between the ego and the object being detected. We demonstrate this framework on a car-pedestrian example by computing the satisfaction probabilities for safety requirements formalized in Linear Temporal Logic (LTL).
The Reasonable Crowd: Towards evidence-based and interpretable models of driving behavior
Jul 28, 2021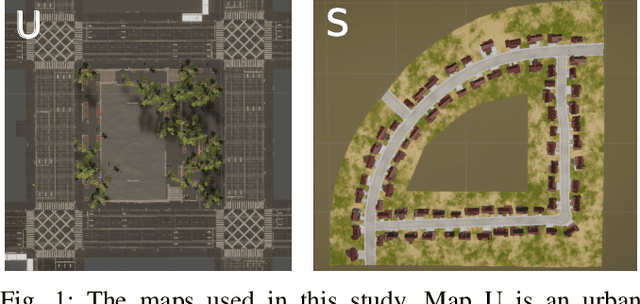
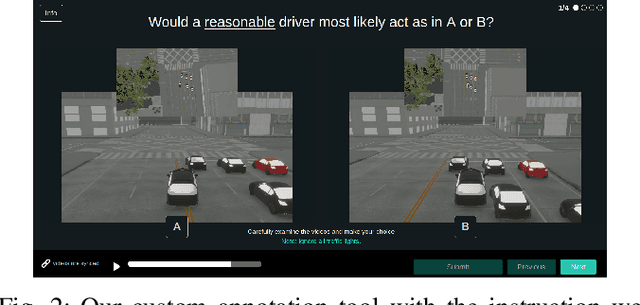
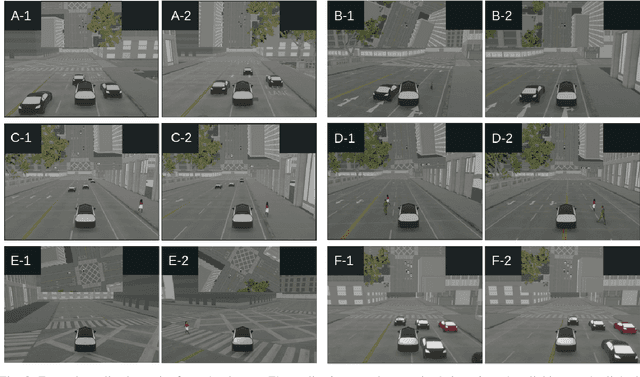
Autonomous vehicles must balance a complex set of objectives. There is no consensus on how they should do so, nor on a model for specifying a desired driving behavior. We created a dataset to help address some of these questions in a limited operating domain. The data consists of 92 traffic scenarios, with multiple ways of traversing each scenario. Multiple annotators expressed their preference between pairs of scenario traversals. We used the data to compare an instance of a rulebook, carefully hand-crafted independently of the dataset, with several interpretable machine learning models such as Bayesian networks, decision trees, and logistic regression trained on the dataset. To compare driving behavior, these models use scores indicating by how much different scenario traversals violate each of 14 driving rules. The rules are interpretable and designed by subject-matter experts. First, we found that these rules were enough for these models to achieve a high classification accuracy on the dataset. Second, we found that the rulebook provides high interpretability without excessively sacrificing performance. Third, the data pointed to possible improvements in the rulebook and the rules, and to potential new rules. Fourth, we explored the interpretability vs performance trade-off by also training non-interpretable models such as a random forest. Finally, we make the dataset publicly available to encourage a discussion from the wider community on behavior specification for AVs. Please find it at github.com/bassam-motional/Reasonable-Crowd.
Interpretable UAV Collision Avoidance using Deep Reinforcement Learning
Jun 04, 2021
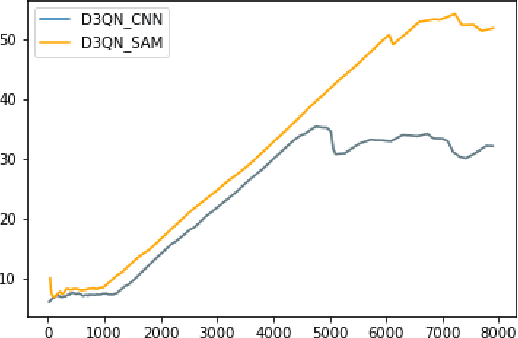
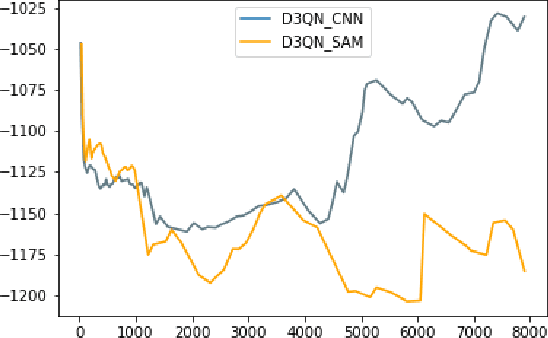
The significant components of any successful autonomous flight system are task completion and collision avoidance. Most deep learning algorithms successfully execute these aspects under the environment and conditions they are trained. However, they fail when subjected to novel environments. This paper presents an autonomous multi-rotor flight algorithm, using Deep Reinforcement Learning augmented with Self-Attention Models, that can effectively reason when subjected to varying inputs. In addition to their reasoning ability, they are also interpretable, enabling it to be used under real-world conditions. We have tested our algorithm under different weather conditions and environments and found it robust compared to conventional Deep Reinforcement Learning algorithms.
Leveraging Classification Metrics for Quantitative System-Level Analysis with Temporal Logic Specifications
May 16, 2021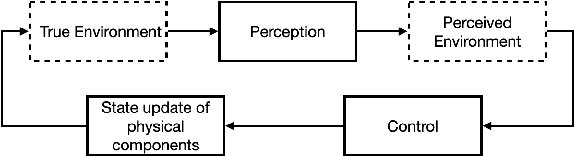
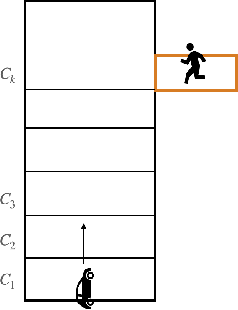
In many autonomy applications, performance of perception algorithms is important for effective planning and control. In this paper, we introduce a framework for computing the probability of satisfaction of formal system specifications given a confusion matrix, a statistical average performance measure for multi-class classification. We define the probability of satisfaction of a linear temporal logic formula given a specific initial state of the agent and true state of the environment. Then, we present an algorithm to construct a Markov chain that represents the system behavior under the composition of the perception and control components such that the probability of the temporal logic formula computed over the Markov chain is consistent with the probability that the temporal logic formula is satisfied by our system. We illustrate this approach on a simple example of a car with pedestrian on the sidewalk environment, and compute the probability of satisfaction of safety requirements for varying parameters of the vehicle. We also illustrate how satisfaction probability changes with varied precision and recall derived from the confusion matrix. Based on our results, we identify several opportunities for future work in developing quantitative system-level analysis that incorporates perception models.
Minimum-Violation Planning for Autonomous Systems: Theoretical and Practical Considerations
Sep 24, 2020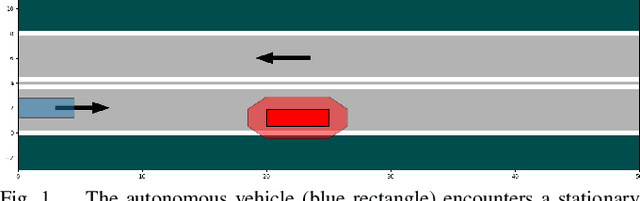
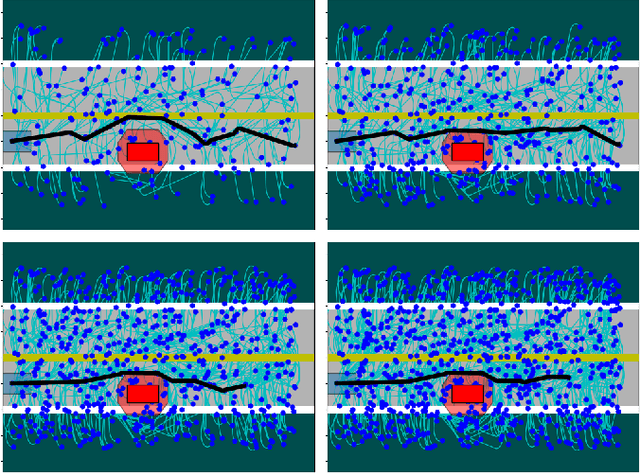
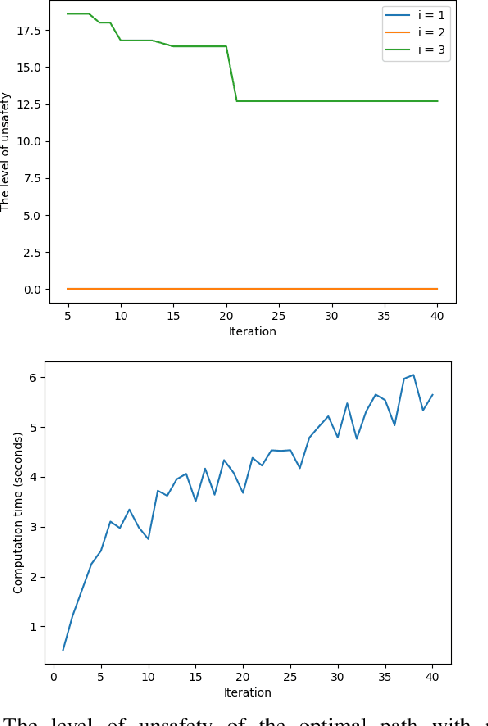
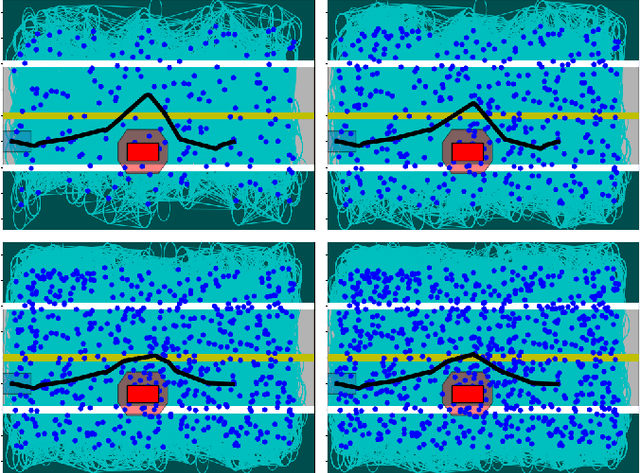
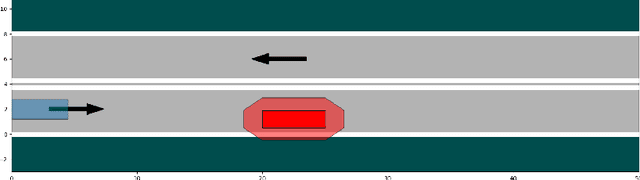
This paper considers the problem of computing an optimal trajectory for an autonomous system that is subject to a set of potentially conflicting rules. First, we introduce the concept of prioritized safety specifications, where each rule is expressed as a temporal logic formula with its associated weight and priority. The optimality is defined based on the violation of such prioritized safety specifications. We then introduce a class of temporal logic formulas called $\textrm{si-FLTL}_{\mathsf{G_X}}$ and develop an efficient, incremental sampling-based approach to solve this minimum-violation planning problem with guarantees on asymptotic optimality. We illustrate the application of the proposed approach in autonomous vehicles, showing that $\textrm{si-FLTL}_{\mathsf{G_X}}$ formulas are sufficiently expressive to describe many traffic rules. Finally, we discuss practical considerations and present simulation results for a vehicle overtaking scenario.
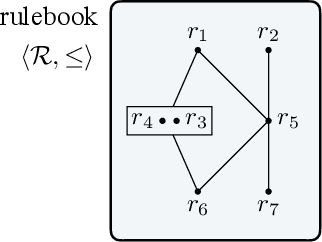
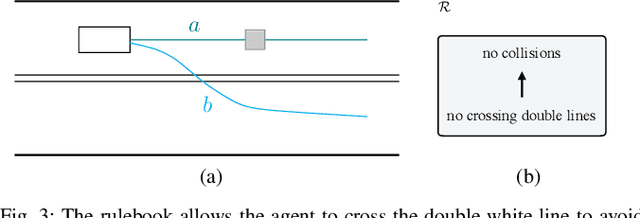
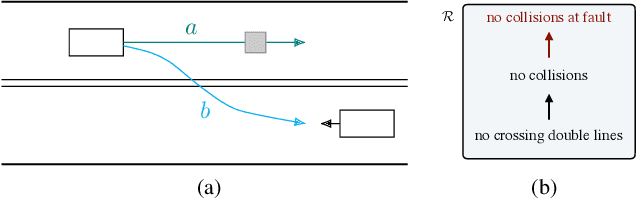
Liability, Ethics, and Culture-Aware Behavior Specification using Rulebooks
Mar 01, 2019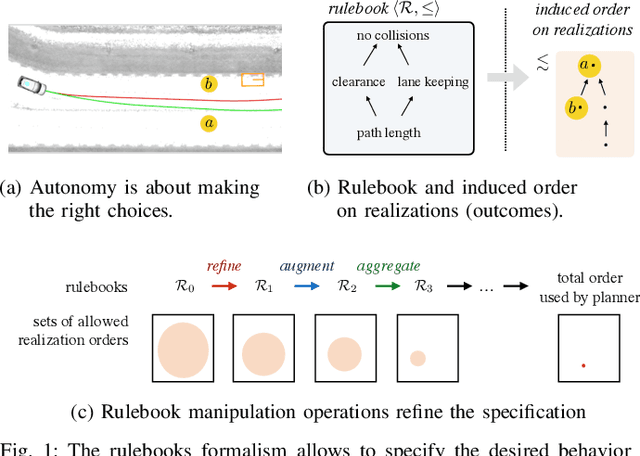
The behavior of self-driving cars must be compatible with an enormous set of conflicting and ambiguous objectives, from law, from ethics, from the local culture, and so on. This paper describes a new way to conveniently define the desired behavior for autonomous agents, which we use on the self-driving cars developed at nuTonomy. We define a "rulebook" as a pre-ordered set of "rules", each akin to a violation metric on the possible outcomes ("realizations"). The rules are partially ordered by priority. The semantics of a rulebook imposes a pre-order on the set of realizations. We study the compositional properties of the rulebooks, and we derive which operations we can allow on the rulebooks to preserve previously-introduced constraints. While we demonstrate the application of these techniques in the self-driving domain, the methods are domain-independent.