 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation Metrics for Object Detection for Autonomous Systems
Paper and Code
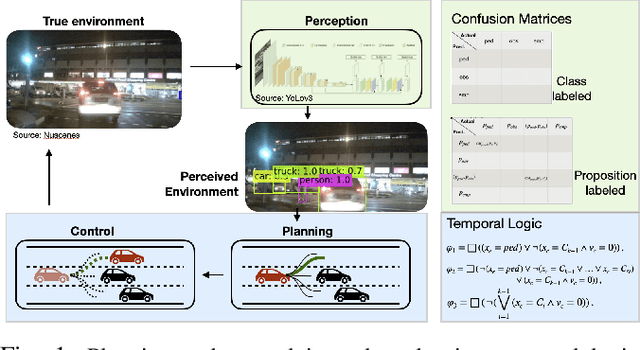
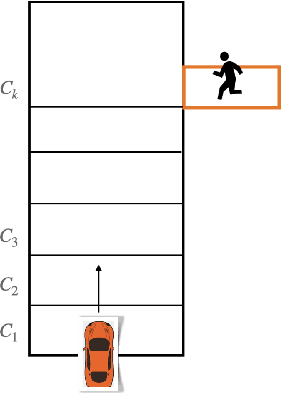
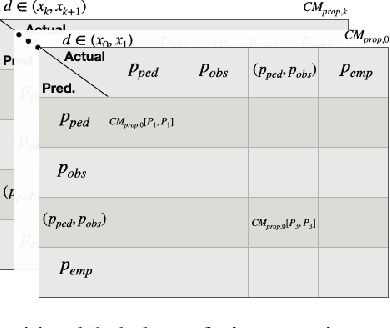
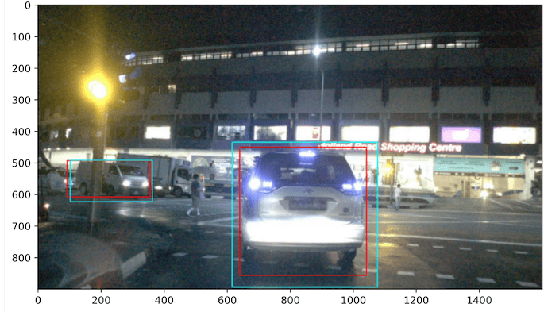
This paper studies the evaluation of learning-based object detection models in conjunction with model-checking of formal specifications defined on an abstract model of an autonomous system and its environment. In particular, we define two metrics -- \emph{proposition-labeled} and \emph{class-labeled} confusion matrices -- for evaluating object detection, and we incorporate these metrics to compute the satisfaction probability of system-level safety requirements. While confusion matrices have been effective for comparative evaluation of classification and object detection models, our framework fills two key gaps. First, we relate the performance of object detection to formal requirements defined over downstream high-level planning tasks. In particular, we provide empirical results that show that the choice of a good object detection algorithm, with respect to formal requirements on the overall system, significantly depends on the downstream planning and control design. Secondly, unlike the traditional confusion matrix, our metrics account for variations in performance with respect to the distance between the ego and the object being detected. We demonstrate this framework on a car-pedestrian example by computing the satisfaction probabilities for safety requirements formalized in Linear Temporal Logic (LTL).