 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety of the Intended Driving Behavior Using Rulebooks
May 10, 2021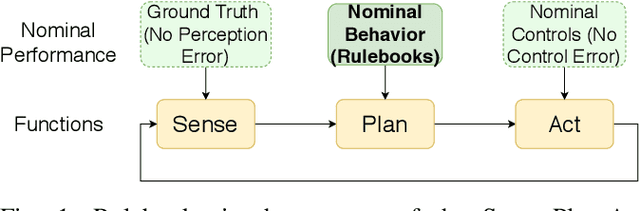
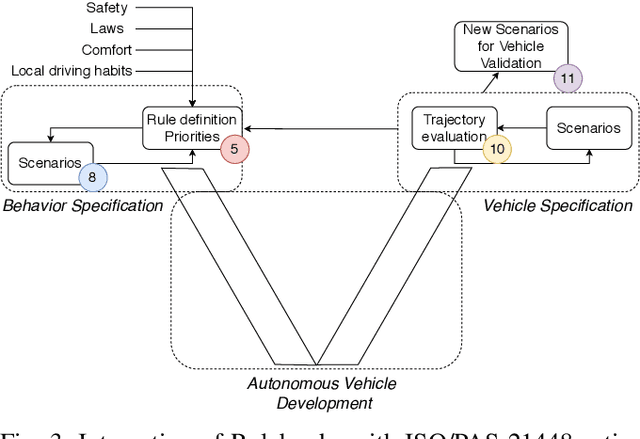
Autonomous Vehicles (AVs) are complex systems that drive in uncertain environments and potentially navigate unforeseeable situations. Safety of these systems requires not only an absence of malfunctions but also high performance of functions in many different scenarios. The ISO/PAS 21448 [1] guidance recommends a process to ensure the Safety of the Intended Functionality (SOTIF) for road vehicles. This process starts with a functional specification that fully describes the intended functionality and further includes the verification and validation that the AV meets this specification. For the path planning function, defining the correct sequence of control actions for each vehicle in all potential driving situations is intractable. In this paper, the authors provide a link between the Rulebooks framework, presented by [2], and the SOTIF process. We establish that Rulebooks provide a functional description of the path planning task in an AV and discuss the potential usage of the method for verification and validation.
Liability, Ethics, and Culture-Aware Behavior Specification using Rulebooks
Mar 01, 2019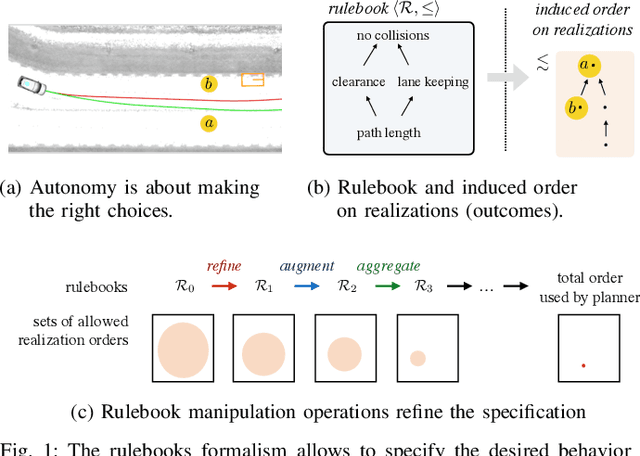
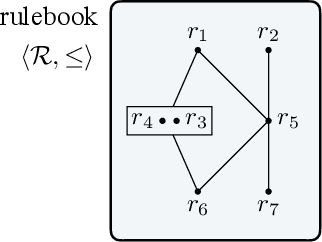
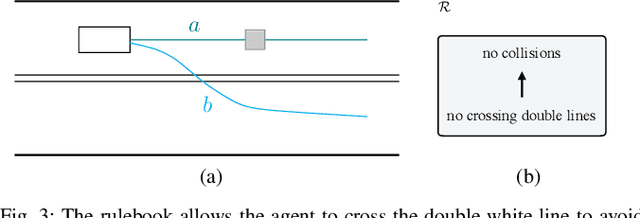
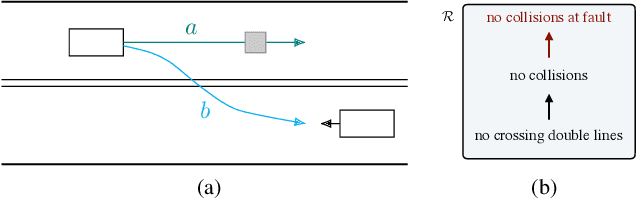
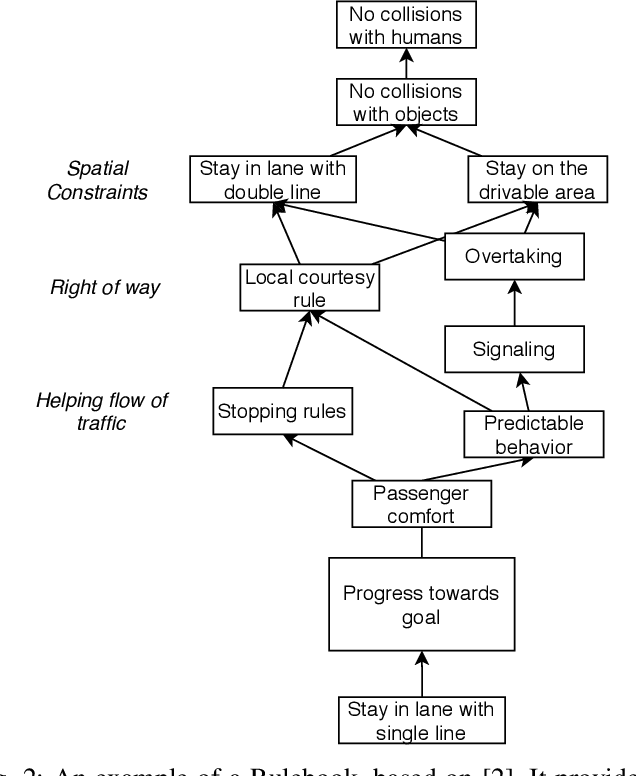
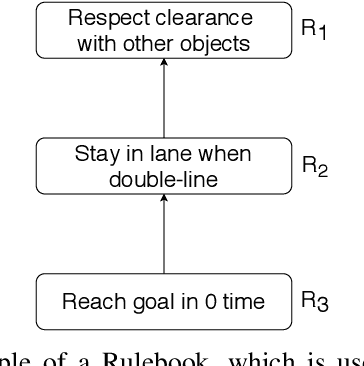
The behavior of self-driving cars must be compatible with an enormous set of conflicting and ambiguous objectives, from law, from ethics, from the local culture, and so on. This paper describes a new way to conveniently define the desired behavior for autonomous agents, which we use on the self-driving cars developed at nuTonomy. We define a "rulebook" as a pre-ordered set of "rules", each akin to a violation metric on the possible outcomes ("realizations"). The rules are partially ordered by priority. The semantics of a rulebook imposes a pre-order on the set of realizations. We study the compositional properties of the rulebooks, and we derive which operations we can allow on the rulebooks to preserve previously-introduced constraints. While we demonstrate the application of these techniques in the self-driving domain, the methods are domain-independent.