 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFROST: Filtering Reasoning Outliers with Attention for Efficient Reasoning
Jan 26, 2026We propose FROST, an attention-aware method for efficient reasoning. Unlike traditional approaches, FROST leverages attention weights to prune uncritical reasoning paths, yielding shorter and more reliable reasoning trajectories. Methodologically, we introduce the concept of reasoning outliers and design an attention-based mechanism to remove them. Theoretically, FROST preserves and enhances the model's reasoning capacity while eliminating outliers at the sentence level. Empirically, we validate FROST on four benchmarks using two strong reasoning models (Phi-4-Reasoning and GPT-OSS-20B), outperforming state-of-the-art methods such as TALE and ThinkLess. Notably, FROST achieves an average 69.68% reduction in token usage and a 26.70% improvement in accuracy over the base model. Furthermore, in evaluations of attention outlier metrics, FROST reduces the maximum infinity norm by 15.97% and the average kurtosis by 91.09% compared to the base model. Code is available at https://github.com/robinzixuan/FROST
Balancing Utility and Privacy: Dynamically Private SGD with Random Projection
Sep 11, 2025Stochastic optimization is a pivotal enabler in modern machine learning, producing effective models for various tasks. However, several existing works have shown that model parameters and gradient information are susceptible to privacy leakage. Although Differentially Private SGD (DPSGD) addresses privacy concerns, its static noise mechanism impacts the error bounds for model performance. Additionally, with the exponential increase in model parameters, efficient learning of these models using stochastic optimizers has become more challenging. To address these concerns, we introduce the Dynamically Differentially Private Projected SGD (D2P2-SGD) optimizer. In D2P2-SGD, we combine two important ideas: (i) dynamic differential privacy (DDP) with automatic gradient clipping and (ii) random projection with SGD, allowing dynamic adjustment of the tradeoff between utility and privacy of the model. It exhibits provably sub-linear convergence rates across different objective functions, matching the best available rate. The theoretical analysis further suggests that DDP leads to better utility at the cost of privacy, while random projection enables more efficient model learning. Extensive experiments across diverse datasets show that D2P2-SGD remarkably enhances accuracy while maintaining privacy. Our code is available here.
FUSE: First-Order and Second-Order Unified SynthEsis in Stochastic Optimization
Mar 06, 2025Stochastic optimization methods have actively been playing a critical role in modern machine learning algorithms to deliver decent performance. While numerous works have proposed and developed diverse approaches, first-order and second-order methods are in entirely different situations. The former is significantly pivotal and dominating in emerging deep learning but only leads convergence to a stationary point. However, second-order methods are less popular due to their computational intensity in large-dimensional problems. This paper presents a novel method that leverages both the first-order and second-order methods in a unified algorithmic framework, termed FUSE, from which a practical version (PV) is derived accordingly. FUSE-PV stands as a simple yet efficient optimization method involving a switch-over between first and second orders. Additionally, we develop different criteria that determine when to switch. FUSE-PV has provably shown a smaller computational complexity than SGD and Adam. To validate our proposed scheme, we present an ablation study on several simple test functions and show a comparison with baselines for benchmark datasets.
Arboretum: A Large Multimodal Dataset Enabling AI for Biodiversity
Jun 25, 2024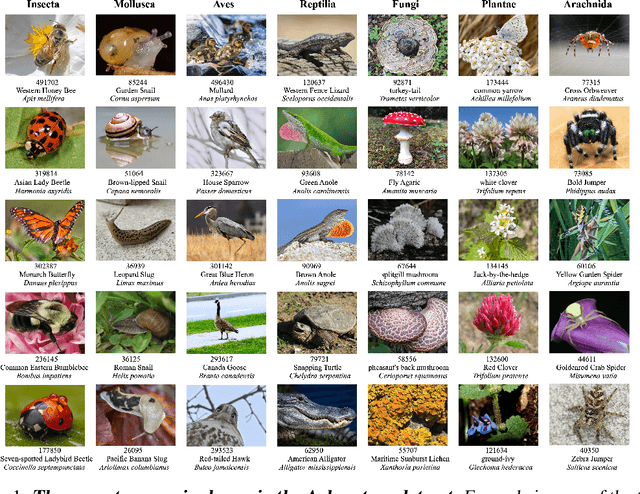
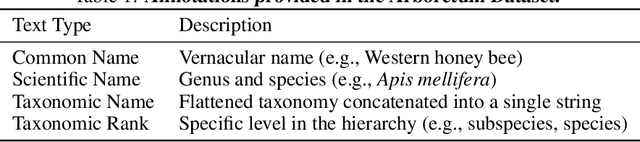
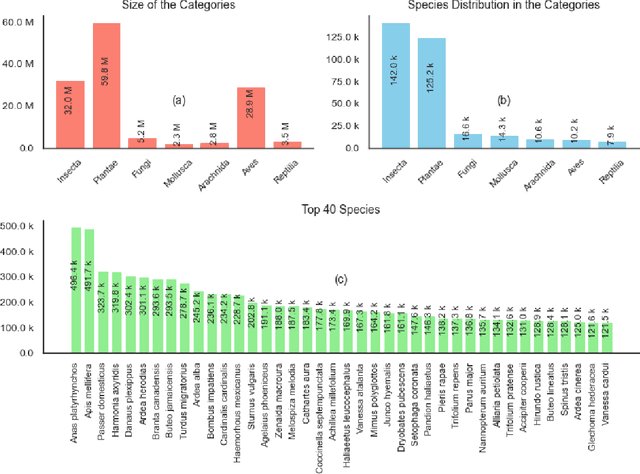
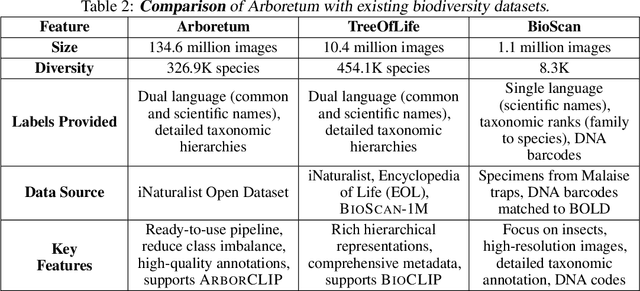
We introduce Arboretum, the largest publicly accessible dataset designed to advance AI for biodiversity applications. This dataset, curated from the iNaturalist community science platform and vetted by domain experts to ensure accuracy, includes 134.6 million images, surpassing existing datasets in scale by an order of magnitude. The dataset encompasses image-language paired data for a diverse set of species from birds (Aves), spiders/ticks/mites (Arachnida), insects (Insecta), plants (Plantae), fungus/mushrooms (Fungi), snails (Mollusca), and snakes/lizards (Reptilia), making it a valuable resource for multimodal vision-language AI models for biodiversity assessment and agriculture research. Each image is annotated with scientific names, taxonomic details, and common names, enhancing the robustness of AI model training. We showcase the value of Arboretum by releasing a suite of CLIP models trained using a subset of 40 million captioned images. We introduce several new benchmarks for rigorous assessment, report accuracy for zero-shot learning, and evaluations across life stages, rare species, confounding species, and various levels of the taxonomic hierarchy. We anticipate that Arboretum will spur the development of AI models that can enable a variety of digital tools ranging from pest control strategies, crop monitoring, and worldwide biodiversity assessment and environmental conservation. These advancements are critical for ensuring food security, preserving ecosystems, and mitigating the impacts of climate change. Arboretum is publicly available, easily accessible, and ready for immediate use. Please see the \href{https://baskargroup.github.io/Arboretum/}{project website} for links to our data, models, and code.
GENESIS-RL: GEnerating Natural Edge-cases with Systematic Integration of Safety considerations and Reinforcement Learning
Mar 27, 2024



In the rapidly evolving field of autonomous systems, the safety and reliability of the system components are fundamental requirements. These components are often vulnerable to complex and unforeseen environments, making natural edge-case generation essential for enhancing system resilience. This paper presents GENESIS-RL, a novel framework that leverages system-level safety considerations and reinforcement learning techniques to systematically generate naturalistic edge cases. By simulating challenging conditions that mimic the real-world situations, our framework aims to rigorously test entire system's safety and reliability. Although demonstrated within the autonomous driving application, our methodology is adaptable across diverse autonomous systems. Our experimental validation, conducted on high-fidelity simulator underscores the overall effectiveness of this framework.
Vision-Language Models can Identify Distracted Driver Behavior from Naturalistic Videos
Jun 22, 2023Recognizing the activities, causing distraction, in real-world driving scenarios is critical for ensuring the safety and reliability of both drivers and pedestrians on the roadways. Conventional computer vision techniques are typically data-intensive and require a large volume of annotated training data to detect and classify various distracted driving behaviors, thereby limiting their efficiency and scalability. We aim to develop a generalized framework that showcases robust performance with access to limited or no annotated training data. Recently, vision-language models have offered large-scale visual-textual pretraining that can be adapted to task-specific learning like distracted driving activity recognition. Vision-language pretraining models, such as CLIP, have shown significant promise in learning natural language-guided visual representations. This paper proposes a CLIP-based driver activity recognition approach that identifies driver distraction from naturalistic driving images and videos. CLIP's vision embedding offers zero-shot transfer and task-based finetuning, which can classify distracted activities from driving video data. Our results show that this framework offers state-of-the-art performance on zero-shot transfer and video-based CLIP for predicting the driver's state on two public datasets. We propose both frame-based and video-based frameworks developed on top of the CLIP's visual representation for distracted driving detection and classification task and report the results.