 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA thin and soft optical tactile sensor for highly sensitive object perception
Feb 03, 2026Tactile sensing is crucial in robotics and wearable devices for safe perception and interaction with the environment. Optical tactile sensors have emerged as promising solutions, as they are immune to electromagnetic interference and have high spatial resolution. However, existing optical approaches, particularly vision-based tactile sensors, rely on complex optical assemblies that involve lenses and cameras, resulting in bulky, rigid, and alignment-sensitive designs. In this study, we present a thin, compact, and soft optical tactile sensor featuring an alignment-free configuration. The soft optical sensor operates by capturing deformation-induced changes in speckle patterns generated within a soft silicone material, thereby enabling precise force measurements and texture recognition via machine learning. The experimental results show a root-mean-square error of 40 mN in the force measurement and a classification accuracy of 93.33% over nine classes of textured surfaces, including Mahjong tiles. The proposed speckle-based approach provides a compact, easily fabricated, and mechanically compliant platform that bridges optical sensing with flexible shape-adaptive architectures, thereby demonstrating its potential as a novel tactile-sensing paradigm for soft robotics and wearable haptic interfaces.
Blending Optimal Control and Biologically Plausible Learning for Noise-Robust Physical Neural Networks
Feb 26, 2025The rapidly increasing computational demands for artificial intelligence (AI) have spurred the exploration of computing principles beyond conventional digital computers. Physical neural networks (PNNs) offer efficient neuromorphic information processing by harnessing the innate computational power of physical processes; however, training their weight parameters is computationally expensive. We propose a training approach for substantially reducing this training cost. Our training approach merges an optimal control method for continuous-time dynamical systems with a biologically plausible training method--direct feedback alignment. In addition to the reduction of training time, this approach achieves robust processing even under measurement errors and noise without requiring detailed system information. The effectiveness was numerically and experimentally verified in an optoelectronic delay system. Our approach significantly extends the range of physical systems practically usable as PNNs.
* 28 pages, 10 figures
Optical hyperdimensional soft sensing: Speckle-based touch interface and tactile sensor
Jan 06, 2024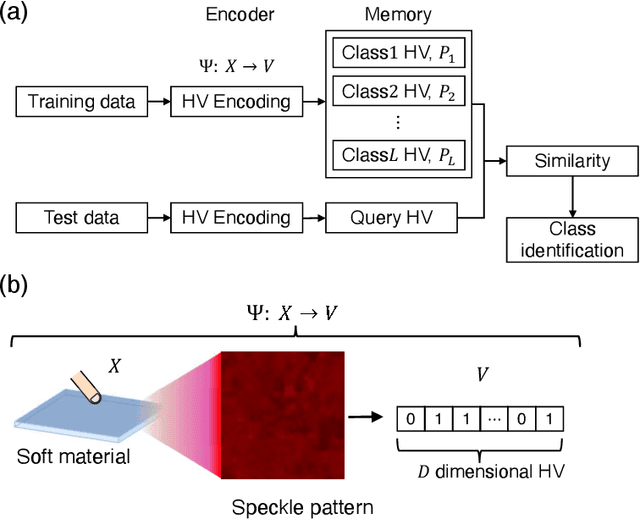
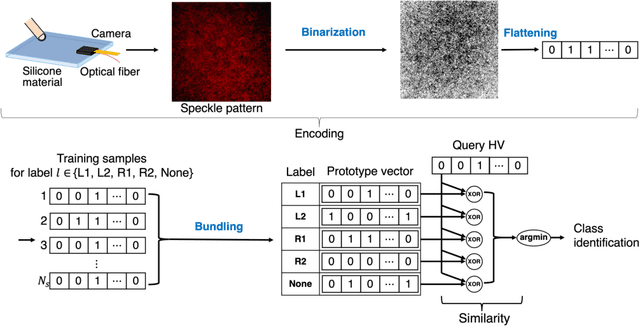
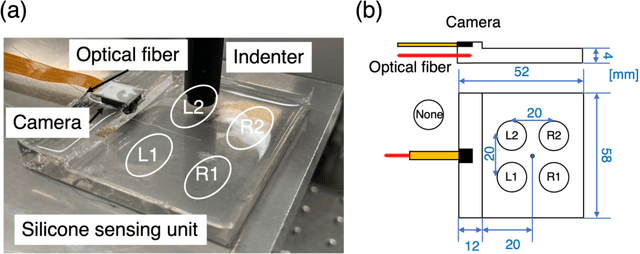
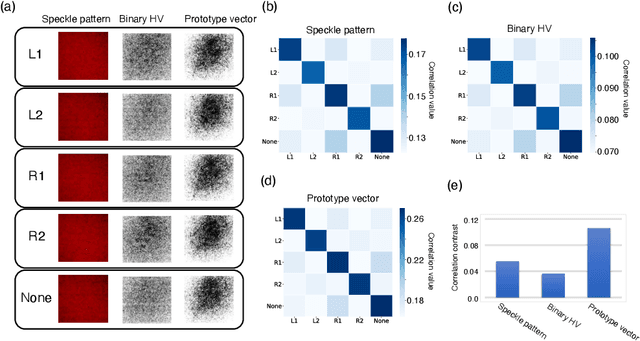
Hyperdimensional computing (HDC) is an emerging computing paradigm that exploits the distributed representation of input data in a hyperdimensional space, the dimensions of which are typically between 1,000--10,000. The hyperdimensional distributed representation enables energy-efficient, low-latency, and noise-robust computations with low-precision and basic arithmetic operations. In this study, we propose optical hyperdimensional distributed representations based on laser speckles for adaptive, efficient, and low-latency optical sensor processing. In the proposed approach, sensory information is optically mapped into a hyperdimensional space with >250,000 dimensions, enabling HDC-based cognitive processing. We use this approach for the processing of a soft-touch interface and a tactile sensor and demonstrate to achieve high accuracy of touch or tactile recognition while significantly reducing training data amount and computational burdens, compared with previous machine-learning-based sensing approaches. Furthermore, we show that this approach enables adaptive recalibration to keep high accuracy even under different conditions.
Ultrafast single-channel machine vision based on neuro-inspired photonic computing
Feb 15, 2023High-speed machine vision is increasing its importance in both scientific and technological applications. Neuro-inspired photonic computing is a promising approach to speed-up machine vision processing with ultralow latency. However, the processing rate is fundamentally limited by the low frame rate of image sensors, typically operating at tens of hertz. Here, we propose an image-sensor-free machine vision framework, which optically processes real-world visual information with only a single input channel, based on a random temporal encoding technique. This approach allows for compressive acquisitions of visual information with a single channel at gigahertz rates, outperforming conventional approaches, and enables its direct photonic processing using a photonic reservoir computer in a time domain. We experimentally demonstrate that the proposed approach is capable of high-speed image recognition and anomaly detection, and furthermore, it can be used for high-speed imaging. The proposed approach is multipurpose and can be extended for a wide range of applications, including tracking, controlling, and capturing sub-nanosecond phenomena.
Optical skin: Sensor-integration-free multimodal flexible sensing
Feb 03, 2022The biological skin enables animals to sense various stimuli. Extensive efforts have been made recently to develop smart skin-like sensors to extend the capabilities of biological skins; however, simultaneous sensing of several types of stimuli in a large area remains challenging because this requires large-scale sensor integration with numerous wire connections. We propose a simple, highly sensitive, and multimodal sensing approach, which does not require integrating multiple sensors. The proposed approach is based on an optical interference technique, which can encode the information of various stimuli as a spatial pattern. In contrast to the existing approach, the proposed approach, combined with a deep neural network, enables us to freely select the sensing mode according to our purpose. As a key example, we demonstrate simultaneous sensing mode of three different physical quantities, contact force, contact location, and temperature, using a single soft material without requiring complex integration. Another unique property of the proposed approach is spatially continuous sensing with ultrahigh resolution of few tens of micrometers, which enables identifying the shape of the object in contact. Furthermore, we present a haptic soft device for a human-machine interface. The proposed approach encourages the development of high-performance optical skins.
Physical deep learning based on optimal control of dynamical systems
Dec 16, 2020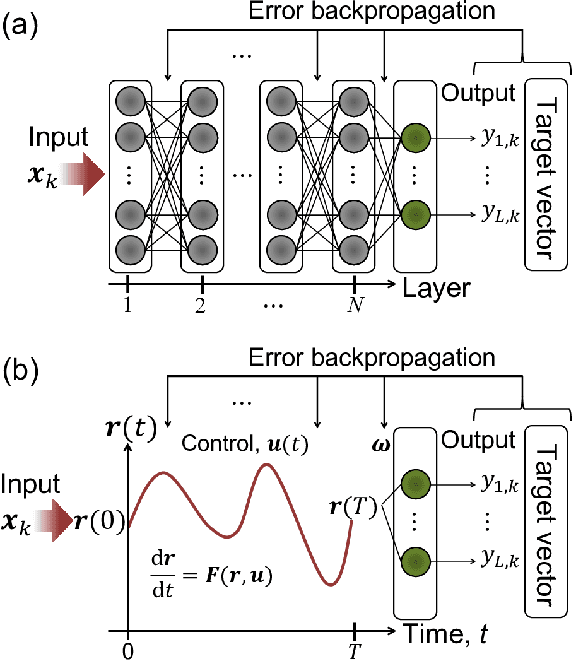
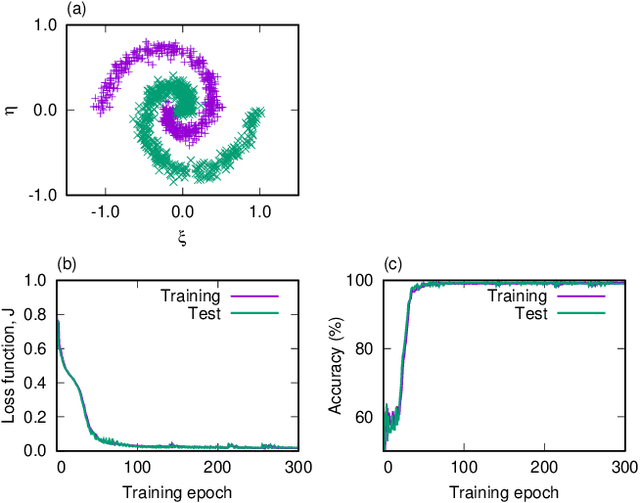
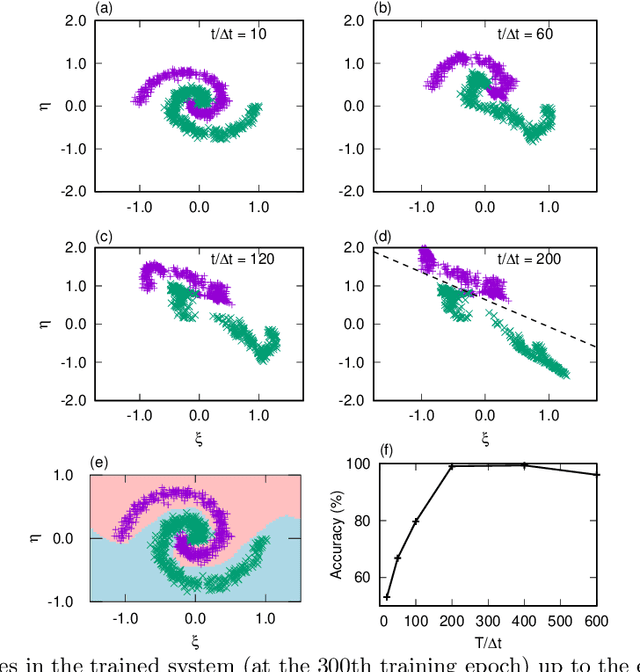
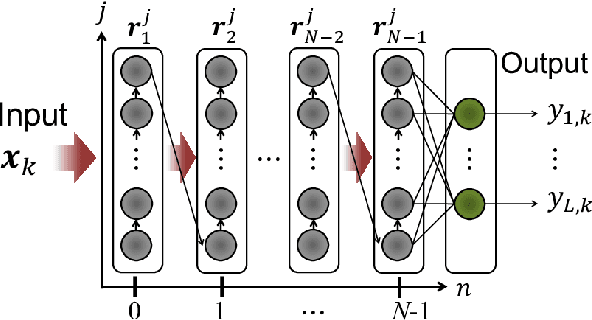
A central topic in recent artificial intelligence technologies is deep learning, which can be regarded as a multilayer feedforward neural network. An essence of deep learning is the information propagation through the layers, suggesting a connection between deep neural networks and dynamical systems, in the sense that the information propagation is explicitly modeled by the time-evolution of dynamical systems. Here, we present a pattern recognition based on optimal control of continuous-time dynamical systems, which is suitable for physical hardware implementation. The learning is based on the adjoint method to optimally control dynamical systems, and the deep (virtual) network structures based on the time evolution of the systems can be used for processing input information. As an example, we apply the dynamics-based recognition approach to an optoelectronic delay system and show that the use of the delay system enables image recognition and nonlinear classifications with only a few control signals, in contrast to conventional multilayer neural networks which require training of a large number of weight parameters. The proposed approach enables to gain insight into mechanisms of deep network processing in the framework of an optimal control problem and opens a novel pathway to realize physical computing hardware.
Lotka-Volterra competition mechanism embedded in a decision-making method
Jul 29, 2019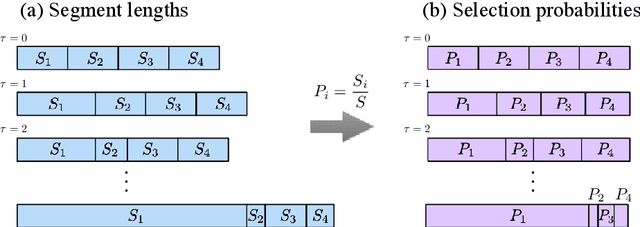
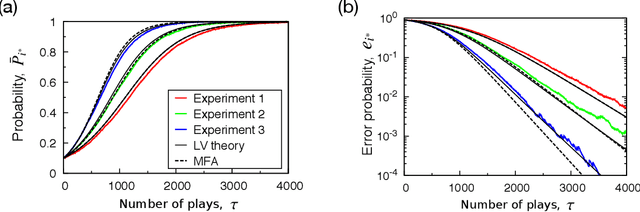
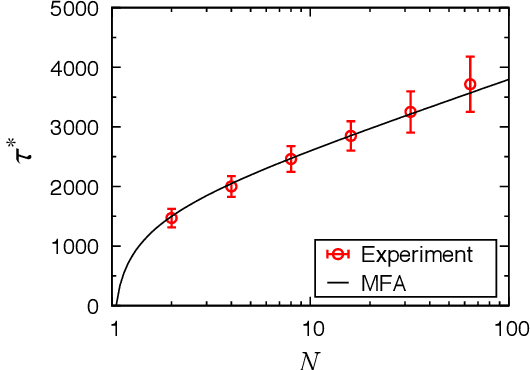
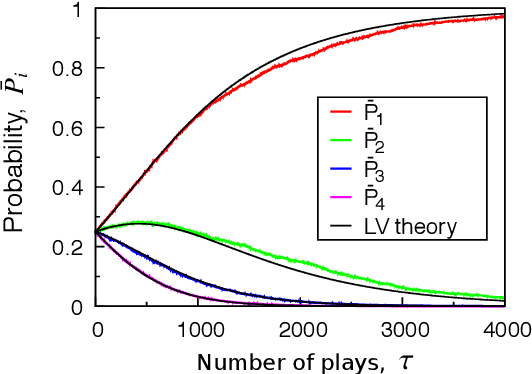
Decision making is a fundamental capability of living organisms, and has recently been gaining increasing importance in many engineering applications. Here, we consider a simple decision-making principle to identify an optimal choice in multi-armed bandit (MAB) problems, which is fundamental in the context of reinforcement learning. We demonstrate that the identification mechanism of the method is well described by using a competitive ecosystem model, i.e., the competitive Lotka-Volterra (LV) model. Based on the "winner-take-all" mechanism in the competitive LV model, we demonstrate that non-best choices are eliminated and only the best choice survives; the failure of the non-best choices exponentially decreases while repeating the choice trials. Furthermore, we apply a mean-field approximation to the proposed decision-making method and show that the method has an excellent scalability of O(log N) with respect to the number of choices N. These results allow for a new perspective on optimal search capabilities in competitive systems.