 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptical hyperdimensional soft sensing: Speckle-based touch interface and tactile sensor
Jan 06, 2024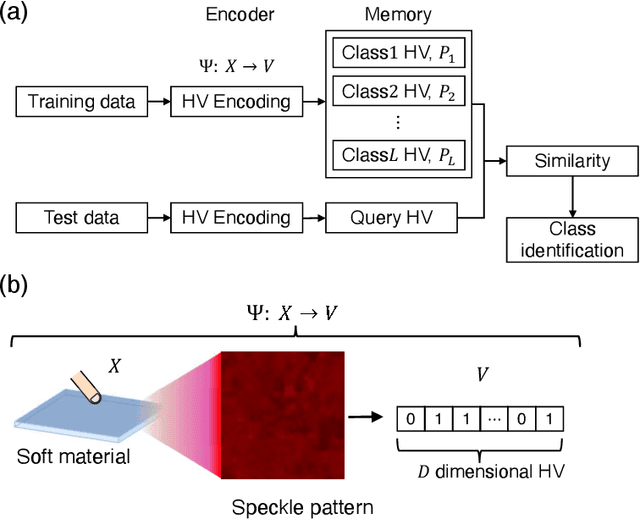
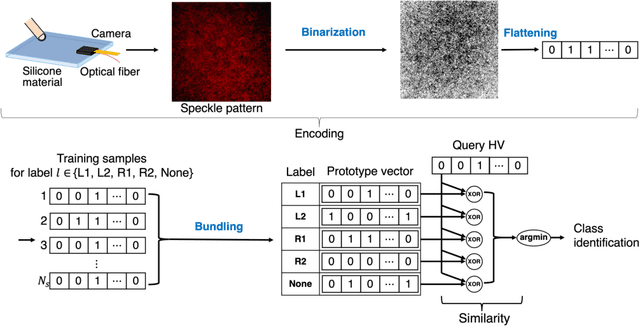
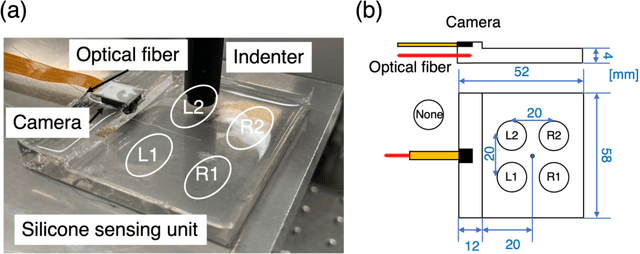
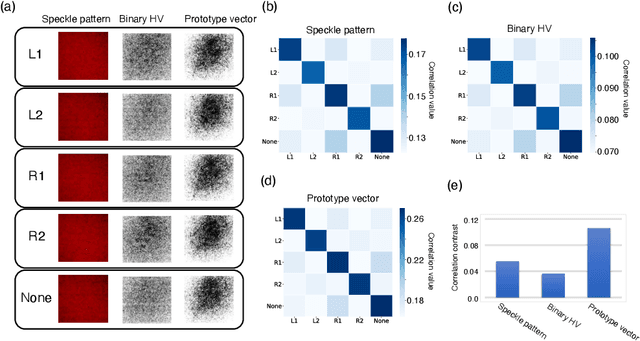
Hyperdimensional computing (HDC) is an emerging computing paradigm that exploits the distributed representation of input data in a hyperdimensional space, the dimensions of which are typically between 1,000--10,000. The hyperdimensional distributed representation enables energy-efficient, low-latency, and noise-robust computations with low-precision and basic arithmetic operations. In this study, we propose optical hyperdimensional distributed representations based on laser speckles for adaptive, efficient, and low-latency optical sensor processing. In the proposed approach, sensory information is optically mapped into a hyperdimensional space with >250,000 dimensions, enabling HDC-based cognitive processing. We use this approach for the processing of a soft-touch interface and a tactile sensor and demonstrate to achieve high accuracy of touch or tactile recognition while significantly reducing training data amount and computational burdens, compared with previous machine-learning-based sensing approaches. Furthermore, we show that this approach enables adaptive recalibration to keep high accuracy even under different conditions.
Optical skin: Sensor-integration-free multimodal flexible sensing
Feb 03, 2022The biological skin enables animals to sense various stimuli. Extensive efforts have been made recently to develop smart skin-like sensors to extend the capabilities of biological skins; however, simultaneous sensing of several types of stimuli in a large area remains challenging because this requires large-scale sensor integration with numerous wire connections. We propose a simple, highly sensitive, and multimodal sensing approach, which does not require integrating multiple sensors. The proposed approach is based on an optical interference technique, which can encode the information of various stimuli as a spatial pattern. In contrast to the existing approach, the proposed approach, combined with a deep neural network, enables us to freely select the sensing mode according to our purpose. As a key example, we demonstrate simultaneous sensing mode of three different physical quantities, contact force, contact location, and temperature, using a single soft material without requiring complex integration. Another unique property of the proposed approach is spatially continuous sensing with ultrahigh resolution of few tens of micrometers, which enables identifying the shape of the object in contact. Furthermore, we present a haptic soft device for a human-machine interface. The proposed approach encourages the development of high-performance optical skins.