 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Rollator: A Case Study in the Agebots Project
Aug 31, 2021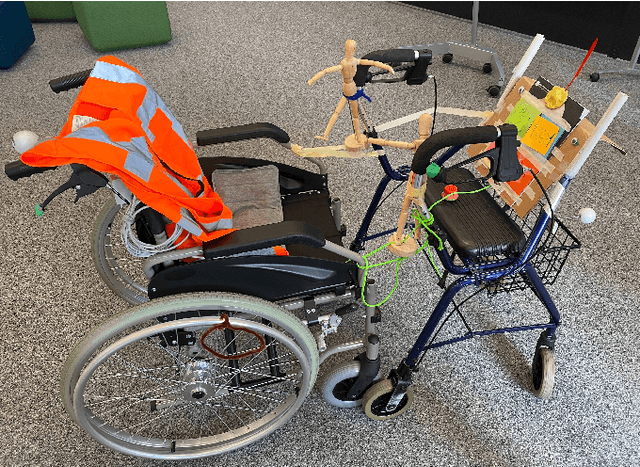
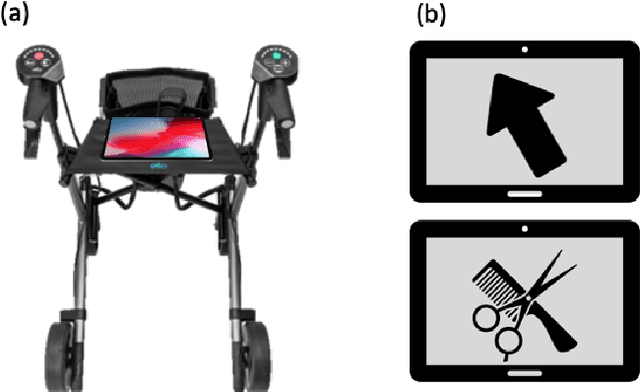
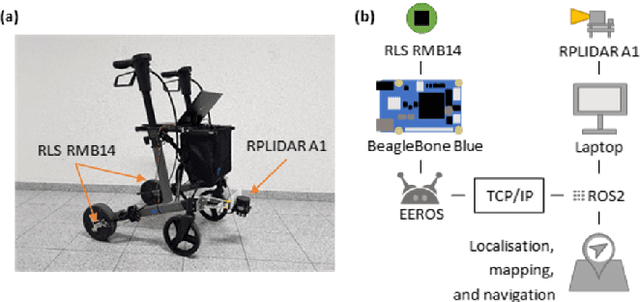
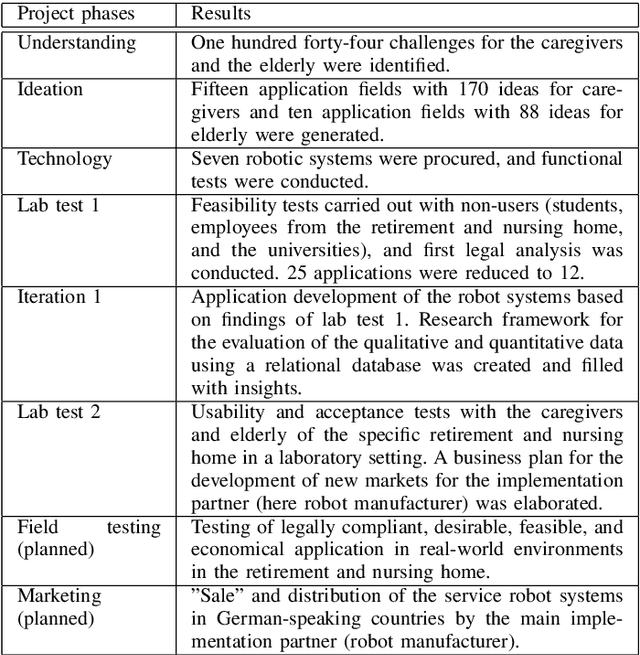
In this paper, we present an iterative development process for a functional model of an autonomous, location-orienting rollator. An interdisciplinary team was involved in the development, working closely with the end-users. This example shows that the design thinking method is suitable for the development of frontier technology devices in the care sector.
Building Affordance Relations for Robotic Agents - A Review
May 14, 2021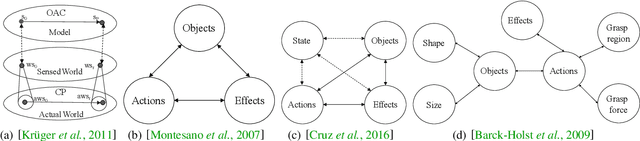

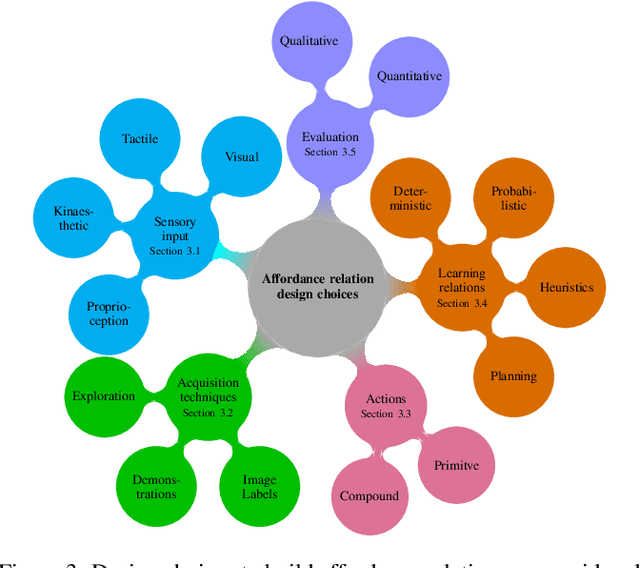
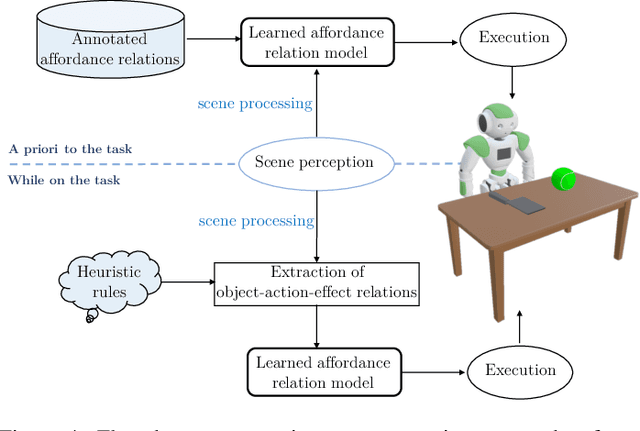
Affordances describe the possibilities for an agent to perform actions with an object. While the significance of the affordance concept has been previously studied from varied perspectives, such as psychology and cognitive science, these approaches are not always sufficient to enable direct transfer, in the sense of implementations, to artificial intelligence (AI)-based systems and robotics. However, many efforts have been made to pragmatically employ the concept of affordances, as it represents great potential for AI agents to effectively bridge perception to action. In this survey, we review and find common ground amongst different strategies that use the concept of affordances within robotic tasks, and build on these methods to provide guidance for including affordances as a mechanism to improve autonomy. To this end, we outline common design choices for building representations of affordance relations, and their implications on the generalisation capabilities of an agent when facing previously unseen scenarios. Finally, we identify and discuss a range of interesting research directions involving affordances that have the potential to improve the capabilities of an AI agent.
Affordance-Aware Handovers with Human Arm Mobility Constraints
Oct 29, 2020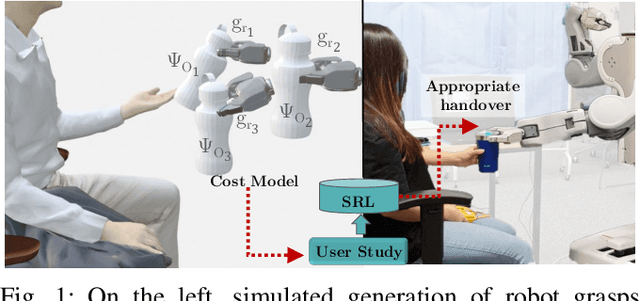
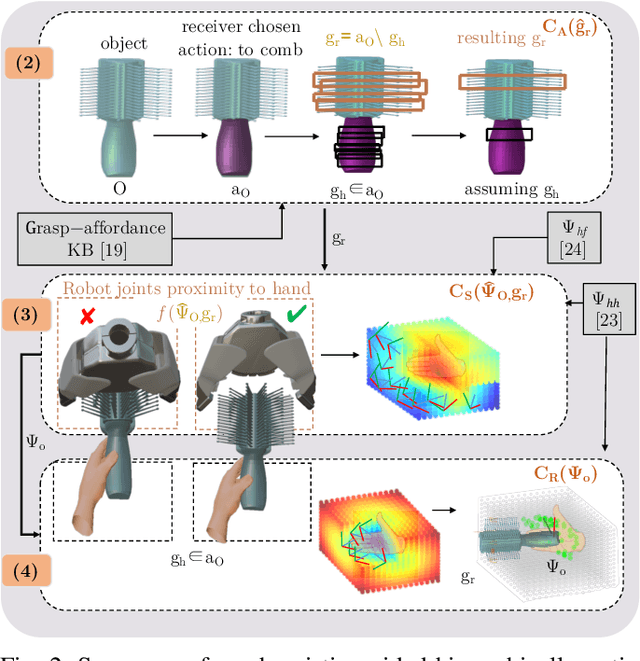
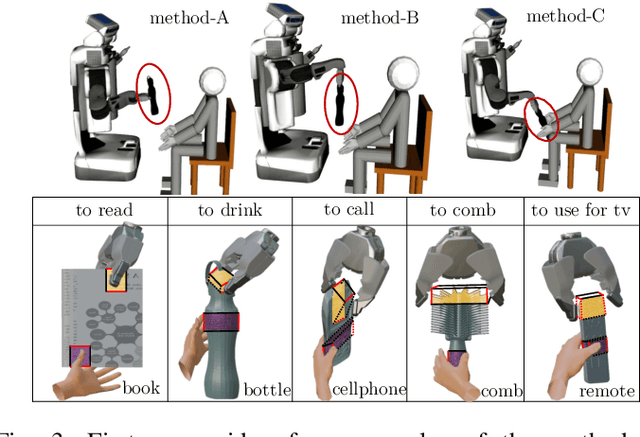
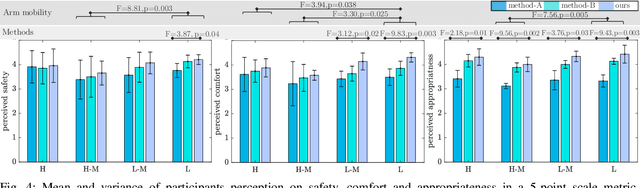
Reasoning about object handover configurations allows an assistive agent to estimate the appropriateness of handover for a receiver with different arm mobility capacities. While there are existing approaches to estimating the effectiveness of handovers, their findings are limited to users without arm mobility impairments and to specific objects. Therefore, current state-of-the-art approaches are unable to hand over novel objects to receivers with different arm mobility capacities. We propose a method that generalises handover behaviours to previously unseen objects, subject to the constraint of a user's arm mobility levels and the task context. We propose a heuristic-guided hierarchically optimised cost whose optimisation adapts object configurations for receivers with low arm mobility. This also ensures that the robot grasps consider the context of the user's upcoming task, i.e., the usage of the object. To understand preferences over handover configurations, we report on the findings of an online study, wherein we presented different handover methods, including ours, to $259$ users with different levels of arm mobility. We encapsulate these preferences in a SRL that is able to reason about the most suitable handover configuration given a receiver's arm mobility and upcoming task. We find that people's preferences over handover methods are correlated to their arm mobility capacities. In experiments with a PR2 robotic platform, we obtained an average handover accuracy of $90.8\%$ when generalising handovers to novel objects.
Self-Assessment of Grasp Affordance Transfer
Jul 04, 2020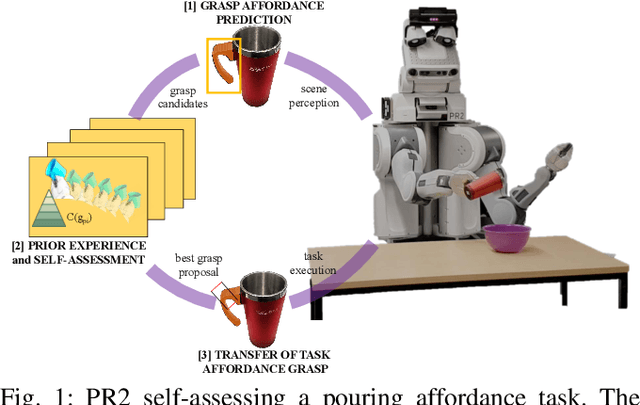
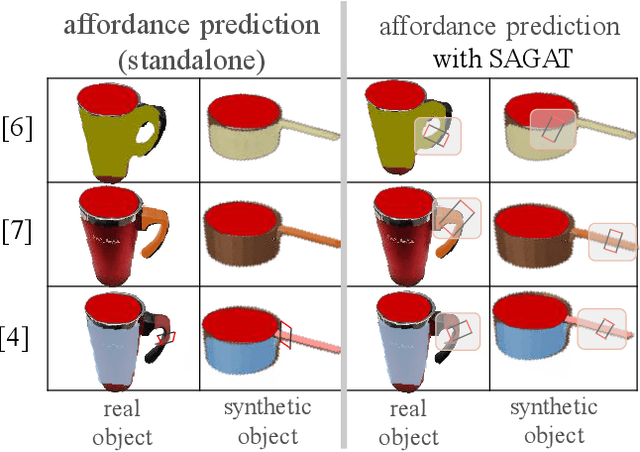
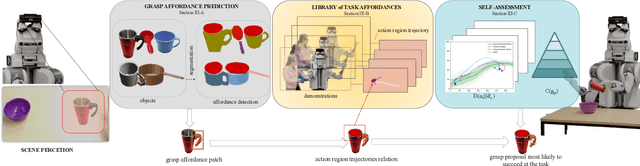
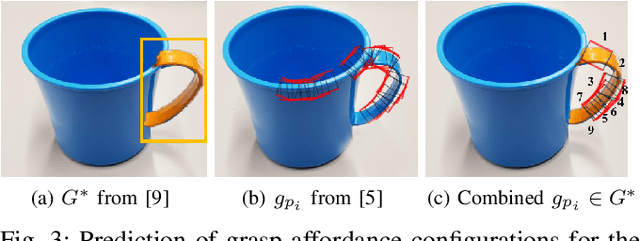
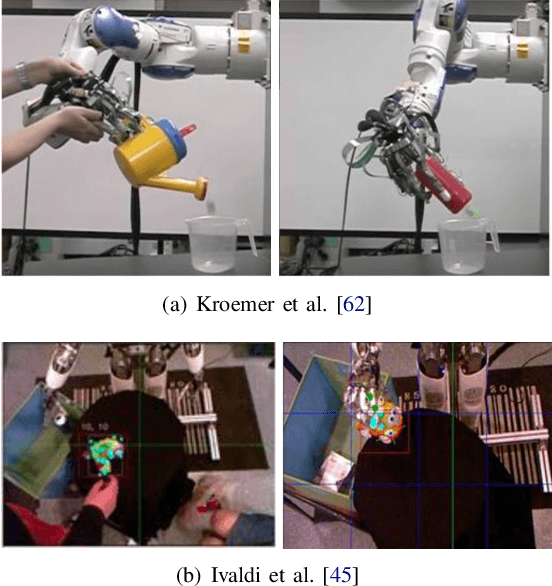
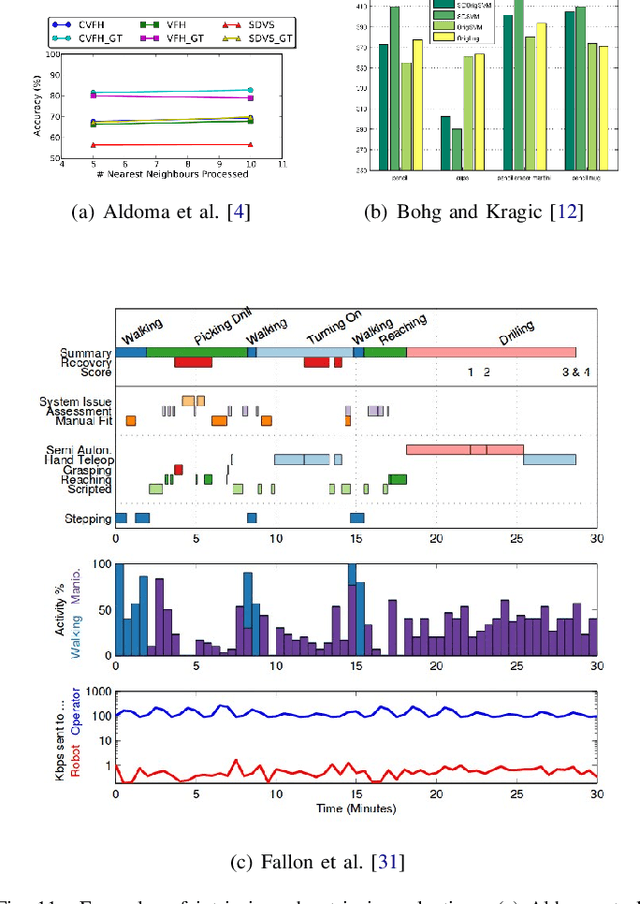
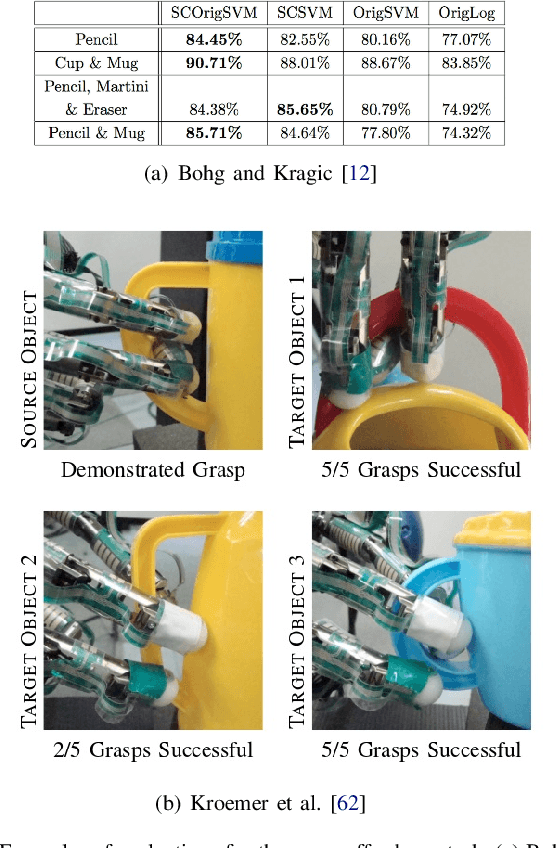
Reasoning about object grasp affordances allows an autonomous agent to estimate the most suitable grasp to execute a task. While current approaches for estimating grasp affordances are effective, their prediction is driven by hypotheses on visual features rather than an indicator of a proposal's suitability for an affordance task. Consequently, these works cannot guarantee any level of performance when executing a task and, in fact, not even ensure successful task completion. In this work, we present a pipeline for SAGAT based on prior experiences. We visually detect a grasp affordance region to extract multiple grasp affordance configuration candidates. Using these candidates, we forward simulate the outcome of executing the affordance task to analyse the relation between task outcome and grasp candidates. The relations are ranked by performance success with a heuristic confidence function and used to build a library of affordance task experiences. The library is later queried to perform one-shot transfer estimation of the best grasp configuration on new objects. Experimental evaluation shows that our method exhibits a significant performance improvement up to 11.7% against current state-of-the-art methods on grasp affordance detection. Experiments on a PR2 robotic platform demonstrate our method's highly reliable deployability to deal with real-world task affordance problems.
Affordances in Robotic Tasks -- A Survey
Apr 15, 2020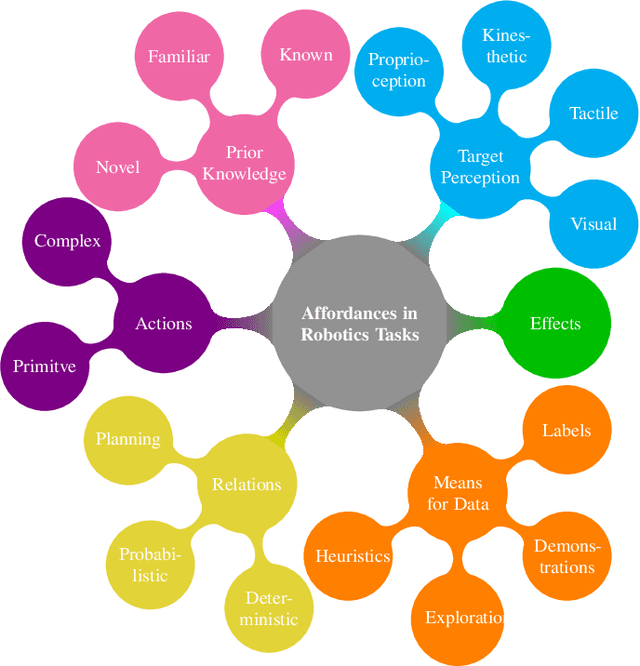
Affordances are key attributes of what must be perceived by an autonomous robotic agent in order to effectively interact with novel objects. Historically, the concept derives from the literature in psychology and cognitive science, where affordances are discussed in a way that makes it hard for the definition to be directly transferred to computational specifications useful for robots. This review article is focused specifically on robotics, so we discuss the related literature from this perspective. In this survey, we classify the literature and try to find common ground amongst different approaches with a view to application in robotics. We propose a categorisation based on the level of prior knowledge that is assumed to build the relationship among different affordance components that matter for a particular robotic task. We also identify areas for future improvement and discuss possible directions that are likely to be fruitful in terms of impact on robotics practice.
Learning Grasp Affordance Reasoning through Semantic Relations
Jun 24, 2019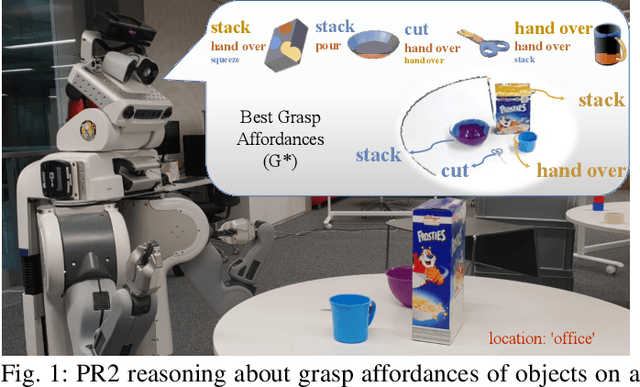
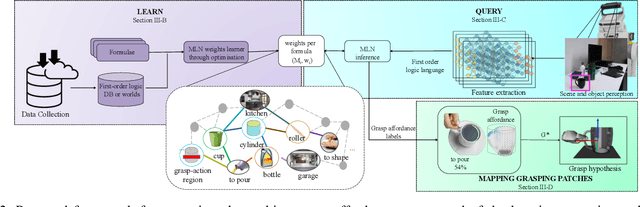
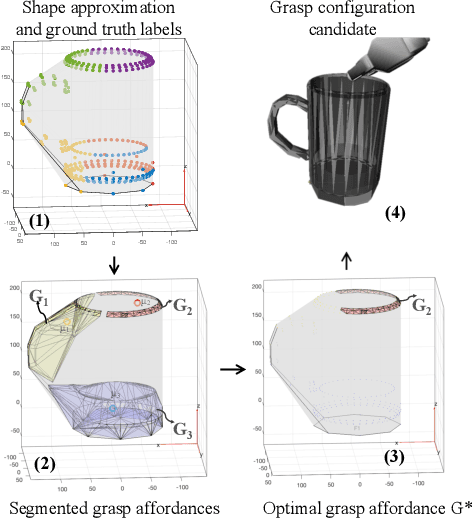
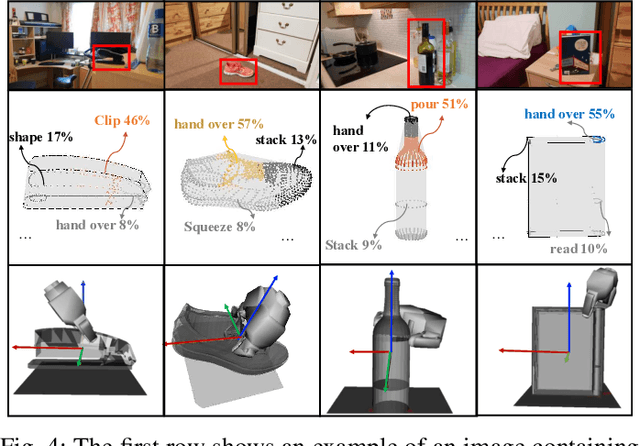
Reasoning about object affordances allows an autonomous agent to perform generalised manipulation tasks among object instances. While current approaches to grasp affordance estimation are effective, they are limited to a single hypothesis. We present an approach for detection and extraction of multiple grasp affordances on an object via visual input. We define semantics as a combination of multiple attributes, which yields benefits in terms of generalisation for grasp affordance prediction. We use Markov Logic Networks to build a knowledge base graph representation to obtain a probability distribution of grasp affordances for an object. To harvest the knowledge base, we collect and make available a novel dataset that relates different semantic attributes. We achieve reliable mappings of the predicted grasp affordances on the object by learning prototypical grasping patches from several examples. We show our method's generalisation capabilities on grasp affordance prediction for novel instances and compare with similar methods in the literature. Moreover, using a robotic platform, on simulated and real scenarios, we evaluate the success of the grasping task when conditioned on the grasp affordance prediction.