 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarine Vehicles Localization Using Grid Cells for Path Integration
Aug 10, 2021



Autonomous Underwater Vehicles (AUVs) are platforms used for research and exploration of marine environments. However, these types of vehicles face many challenges that hinder their widespread use in the industry. One of the main limitations is obtaining accurate position estimation, due to the lack of GPS signal underwater. This estimation is usually done with Kalman filters. However, new developments in the neuroscience field have shed light on the mechanisms by which mammals are able to obtain a reliable estimation of their current position based on external and internal motion cues. A new type of neuron, called Grid cells, has been shown to be part of path integration system in the brain. In this article, we show how grid cells can be used for obtaining a position estimation of underwater vehicles. The model of grid cells used requires only the linear velocities together with heading orientation and provides a reliable estimation of the vehicle's position. We provide simulation results for an AUV which show the feasibility of our proposed methodology.
A reinforcement learning control approach for underwater manipulation under position and torque constraints
Nov 24, 2020
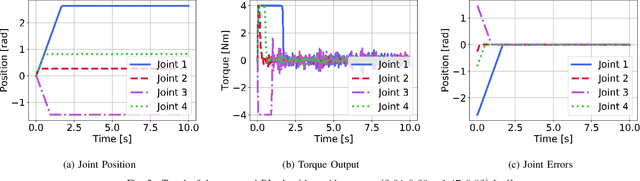

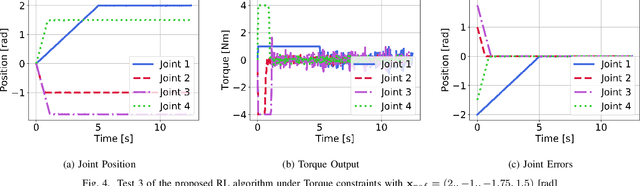
In marine operations underwater manipulators play a primordial role. However, due to uncertainties in the dynamic model and disturbances caused by the environment, low-level control methods require great capabilities to adapt to change. Furthermore, under position and torque constraints the requirements for the control system are greatly increased. Reinforcement learning is a data driven control technique that can learn complex control policies without the need of a model. The learning capabilities of these type of agents allow for great adaptability to changes in the operative conditions. In this article we present a novel reinforcement learning low-level controller for the position control of an underwater manipulator under torque and position constraints. The reinforcement learning agent is based on an actor-critic architecture using sensor readings as state information. Simulation results using the Reach Alpha 5 underwater manipulator show the advantages of the proposed control strategy.