 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-driven controllers and the need for perception systems in underwater manipulation
Paper and Code
Sep 21, 2021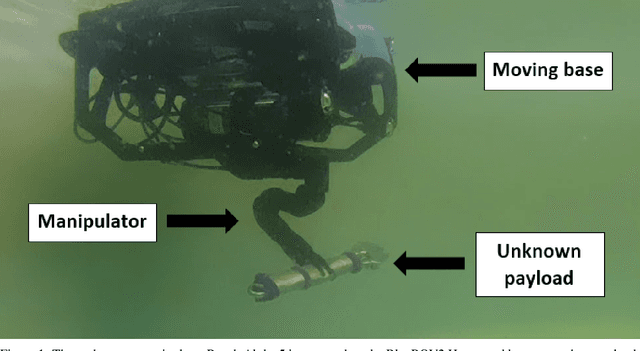
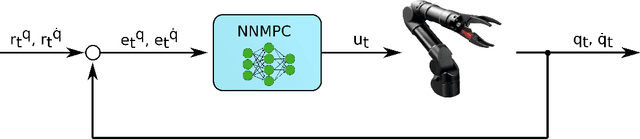
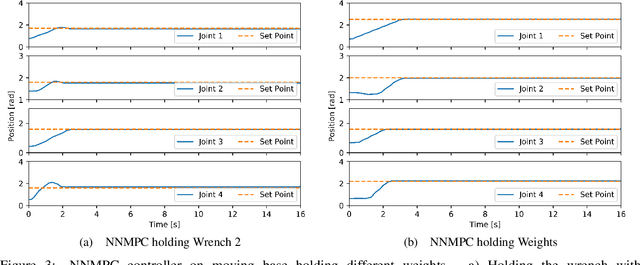
The underwater environment poses a complex problem for developing autonomous capabilities for Underwater Vehicle Manipulator Systems (UVMSs). The modeling of UVMSs is a complicated and costly process due to the highly nonlinear dynamics and the presence of unknown hydrodynamical effects. This is aggravated in tasks where the manipulation of objects is necessary, as this may not only introduce external disturbances that can lead to a fast degradation of the control system performance, but also requires the coordinating with a vision system for the correct grasping and operation of the object. In this article, we introduce a control strategy for UVMSs working with unknown payloads. The proposed control strategy is based on a data-driven optimal controller. We present a number of experimental results showing the benefits of the proposed strategy. Furthermore, we include a discussion regarding the visual perception requirements for the UVMS in order to achieve full autonomy in underwater manipulation tasks of unknown payloads.