 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConformalized Reachable Sets for Obstacle Avoidance With Spheres
Oct 13, 2024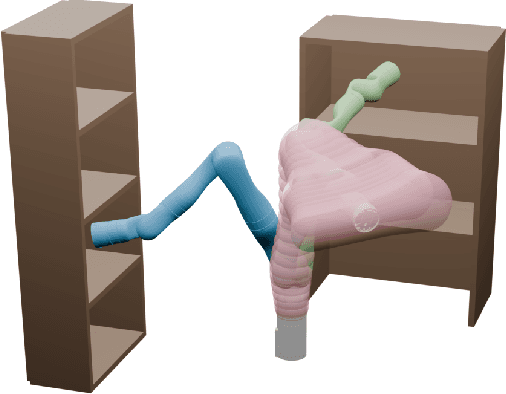
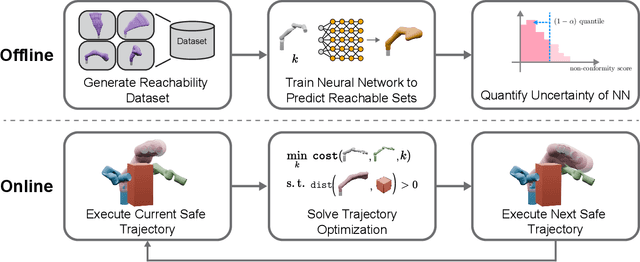
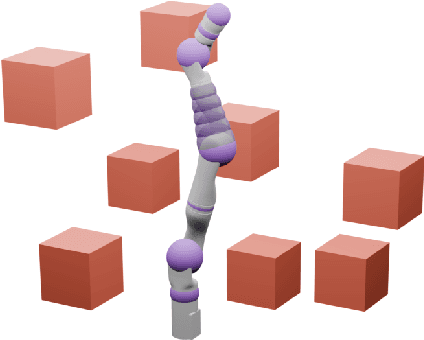
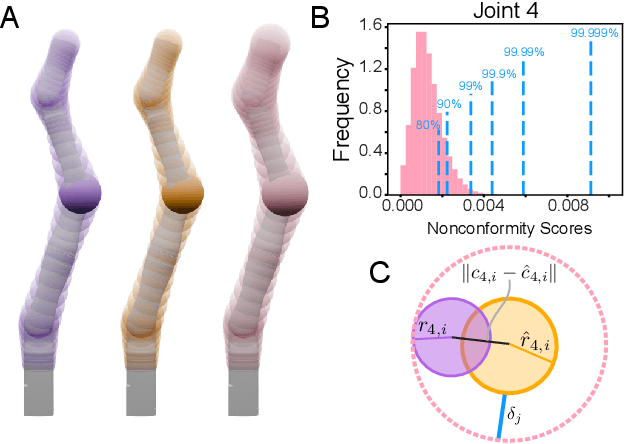
Safe motion planning algorithms are necessary for deploying autonomous robots in unstructured environments. Motion plans must be safe to ensure that the robot does not harm humans or damage any nearby objects. Generating these motion plans in real-time is also important to ensure that the robot can adapt to sudden changes in its environment. Many trajectory optimization methods introduce heuristics that balance safety and real-time performance, potentially increasing the risk of the robot colliding with its environment. This paper addresses this challenge by proposing Conformalized Reachable Sets for Obstacle Avoidance With Spheres (CROWS). CROWS is a novel real-time, receding-horizon trajectory planner that generates probalistically-safe motion plans. Offline, CROWS learns a novel neural network-based representation of a spherebased reachable set that overapproximates the swept volume of the robot's motion. CROWS then uses conformal prediction to compute a confidence bound that provides a probabilistic safety guarantee on the learned reachable set. At runtime, CROWS performs trajectory optimization to select a trajectory that is probabilstically-guaranteed to be collision-free. We demonstrate that CROWS outperforms a variety of state-of-the-art methods in solving challenging motion planning tasks in cluttered environments while remaining collision-free. Code, data, and video demonstrations can be found at https://roahmlab.github.io/crows/
Let's Make a Splan: Risk-Aware Trajectory Optimization in a Normalized Gaussian Splat
Sep 25, 2024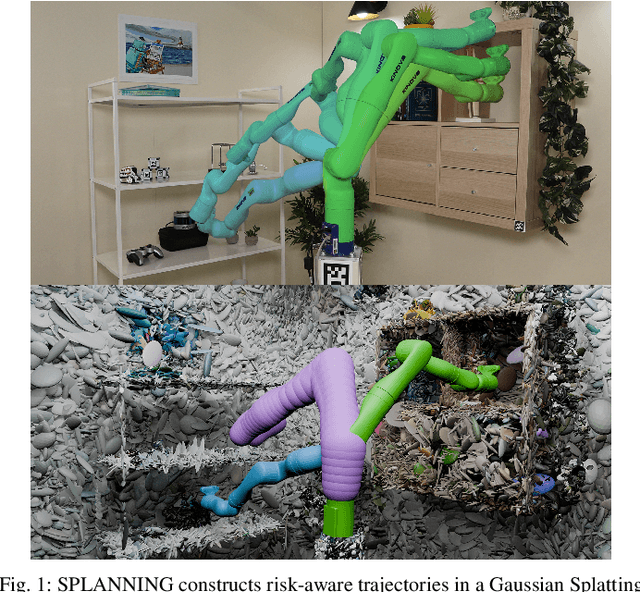
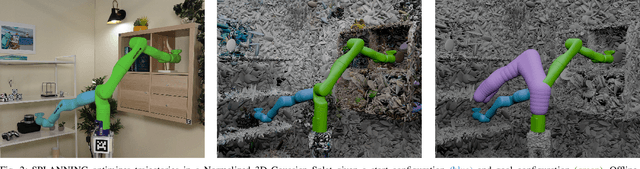
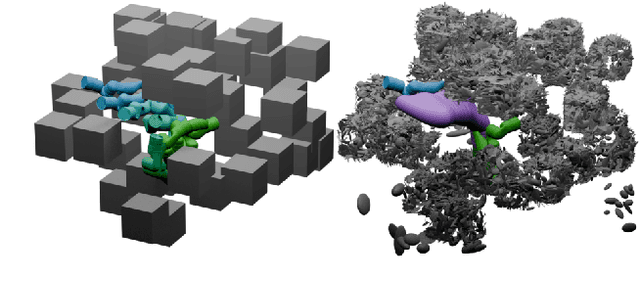
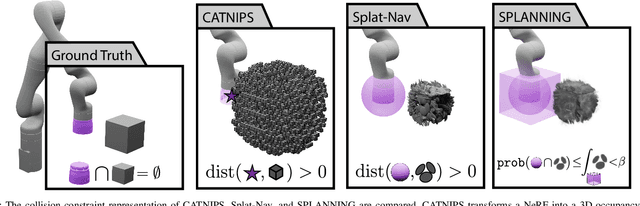
Neural Radiance Fields and Gaussian Splatting have transformed the field of computer vision by enabling photo-realistic representation of complex scenes. Despite this success, they have seen only limited use in real-world robotics tasks such as trajectory optimization. Two key factors have contributed to this limited success. First, it is challenging to reason about collisions in radiance models. Second, it is difficult to perform inference of radiance models fast enough for real-time trajectory synthesis. This paper addresses these challenges by proposing SPLANNING, a risk-aware trajectory optimizer that operates in a Gaussian Splatting model. This paper first derives a method for rigorously upper-bounding the probability of collision between a robot and a radiance field. Second, this paper introduces a normalized reformulation of Gaussian Splatting that enables the efficient computation of the collision bound in a Gaussian Splat. Third, a method is presented to optimize trajectories while avoiding collisions with a scene represented by a Gaussian Splat. Experiments demonstrate that SPLANNING outperforms state-of-the-art methods in generating collision-free trajectories in highly cluttered environments. The proposed system is also tested on a real-world robot manipulator. A project page is available at https://roahmlab.github.io/splanning.
Reachability-based Trajectory Design via Exact Formulation of Implicit Neural Signed Distance Functions
Mar 18, 2024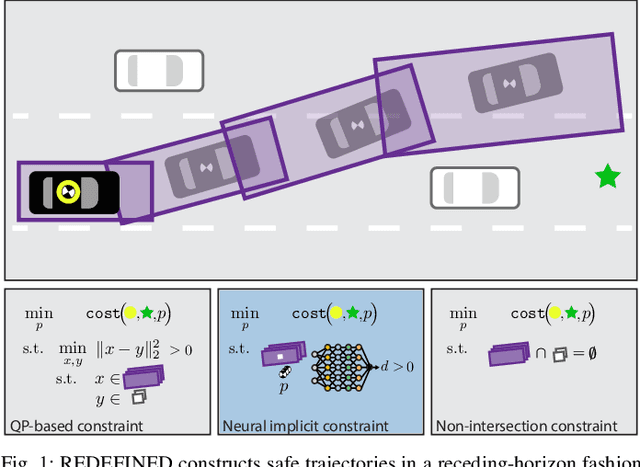
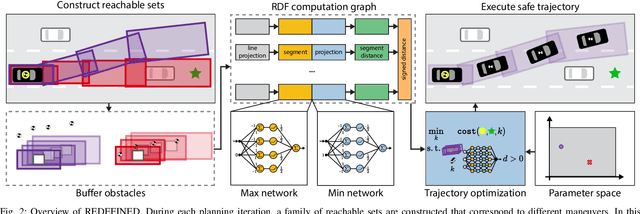
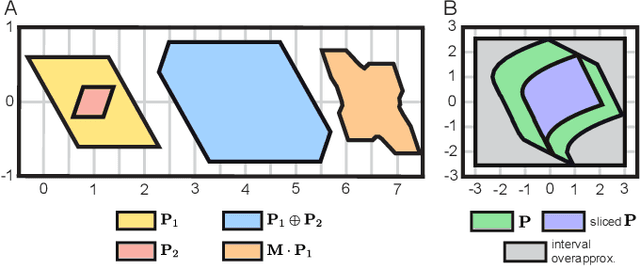
Generating receding-horizon motion trajectories for autonomous vehicles in real-time while also providing safety guarantees is challenging. This is because a future trajectory needs to be planned before the previously computed trajectory is completely executed. This becomes even more difficult if the trajectory is required to satisfy continuous-time collision-avoidance constraints while accounting for a large number of obstacles. To address these challenges, this paper proposes a novel real-time, receding-horizon motion planning algorithm named REachability-based trajectory Design via Exact Formulation of Implicit NEural signed Distance functions (REDEFINED). REDEFINED first applies offline reachability analysis to compute zonotope-based reachable sets that overapproximate the motion of the ego vehicle. During online planning, REDEFINED leverages zonotope arithmetic to construct a neural implicit representation that computes the exact signed distance between a parameterized swept volume of the ego vehicle and obstacle vehicles. REDEFINED then implements a novel, real-time optimization framework that utilizes the neural network to construct a collision avoidance constraint. REDEFINED is compared to a variety of state-of-the-art techniques and is demonstrated to successfully enable the vehicle to safely navigate through complex environments. Code, data, and video demonstrations can be found at https://roahmlab.github.io/redefined/.
Safe Planning for Articulated Robots Using Reachability-based Obstacle Avoidance With Spheres
Feb 13, 2024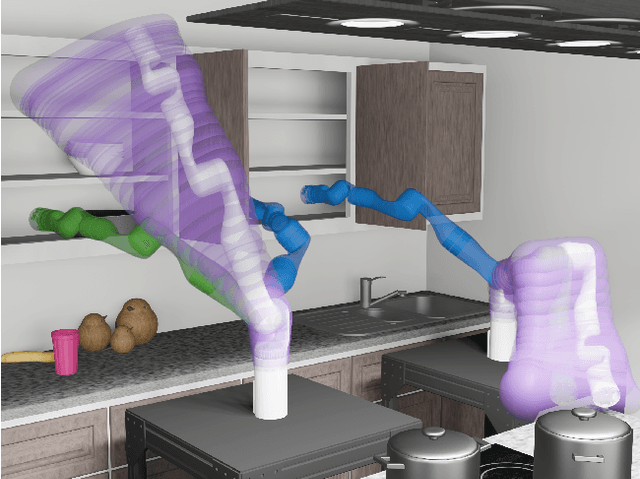
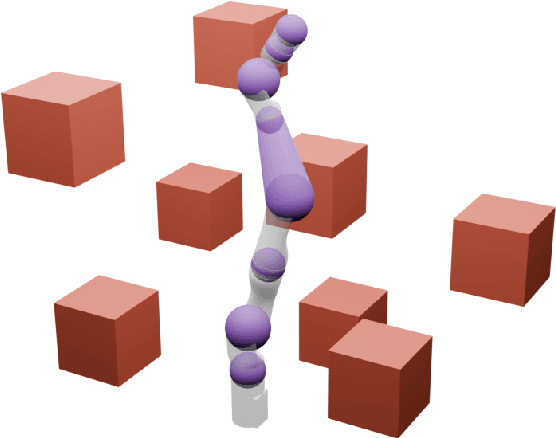
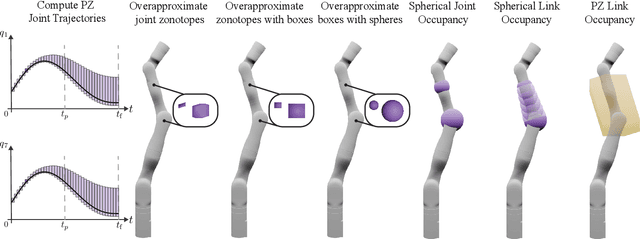
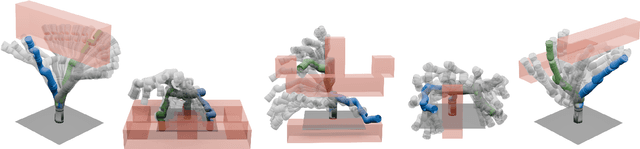
Generating safe motion plans in real-time is necessary for the wide-scale deployment of robots in unstructured and human-centric environments. These motion plans must be safe to ensure humans are not harmed and nearby objects are not damaged. However, they must also be generated in real-time to ensure the robot can quickly adapt to changes in the environment. Many trajectory optimization methods introduce heuristics that trade-off safety and real-time performance, which can lead to potentially unsafe plans. This paper addresses this challenge by proposing Safe Planning for Articulated Robots Using Reachability-based Obstacle Avoidance With Spheres (SPARROWS). SPARROWS is a receding-horizon trajectory planner that utilizes the combination of a novel reachable set representation and an exact signed distance function to generate provably-safe motion plans. At runtime, SPARROWS uses parameterized trajectories to compute reachable sets composed entirely of spheres that overapproximate the swept volume of the robot's motion. SPARROWS then performs trajectory optimization to select a safe trajectory that is guaranteed to be collision-free. We demonstrate that SPARROWS' novel reachable set is significantly less conservative than previous approaches. We also demonstrate that SPARROWS outperforms a variety of state-of-the-art methods in solving challenging motion planning tasks in cluttered environments. Code, data, and video demonstrations can be found at \url{https://roahmlab.github.io/sparrows/}.
Serving Time: Real-Time, Safe Motion Planning and Control for Manipulation of Unsecured Objects
Sep 06, 2023



A key challenge to ensuring the rapid transition of robotic systems from the industrial sector to more ubiquitous applications is the development of algorithms that can guarantee safe operation while in close proximity to humans. Motion planning and control methods, for instance, must be able to certify safety while operating in real-time in arbitrary environments and in the presence of model uncertainty. This paper proposes Wrench Analysis for Inertial Transport using Reachability (WAITR), a certifiably safe motion planning and control framework for serial link manipulators that manipulate unsecured objects in arbitrary environments. WAITR uses reachability analysis to construct over-approximations of the contact wrench applied to unsecured objects, which captures uncertainty in the manipulator dynamics, the object dynamics, and contact parameters such as the coefficient of friction. An optimization problem formulation is presented that can be solved in real-time to generate provably-safe motions for manipulating the unsecured objects. This paper illustrates that WAITR outperforms state of the art methods in a variety of simulation experiments and demonstrates its performance in the real-world.
Reachability-based Trajectory Design with Neural Implicit Safety Constraints
Feb 14, 2023



Generating safe motion plans in real-time is a key requirement for deploying robot manipulators to assist humans in collaborative settings. In particular, robots must satisfy strict safety requirements to avoid self-damage or harming nearby humans. Satisfying these requirements is particularly challenging if the robot must also operate in real-time to adjust to changes in its environment.This paper addresses these challenges by proposing Reachability-based Signed Distance Functions (RDFs) as a neural implicit representation for robot safety. RDF, which can be constructed using supervised learning in a tractable fashion, accurately predicts the distance between the swept volume of a robot arm and an obstacle. RDF's inference and gradient computations are fast and scale linearly with the dimension of the system; these features enable its use within a novel real-time trajectory planning framework as a continuous-time collision-avoidance constraint. The planning method using RDF is compared to a variety of state-of-the-art techniques and is demonstrated to successfully solve challenging motion planning tasks for high-dimensional systems faster and more reliably than all tested methods.
Can't Touch This: Real-Time, Safe Motion Planning and Control for Manipulators Under Uncertainty
Jan 30, 2023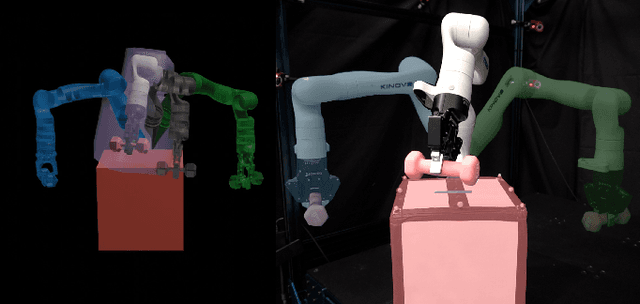
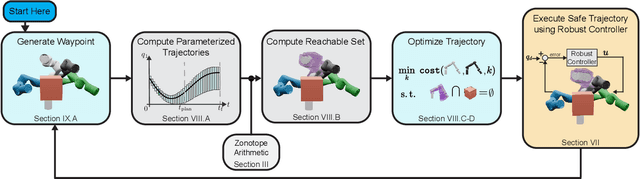
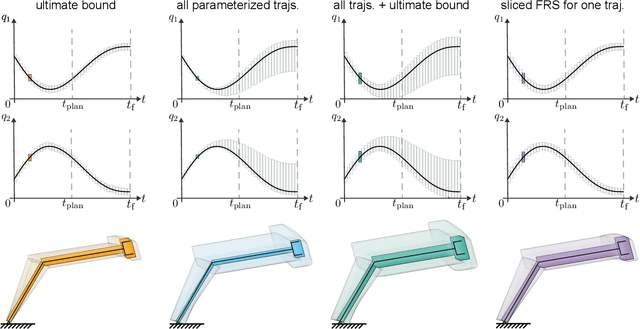
A key challenge to the widespread deployment of robotic manipulators is the need to ensure safety in arbitrary environments while generating new motion plans in real-time. In particular, one must ensure that a manipulator does not collide with obstacles, collide with itself, or exceed its joint torque limits. This challenge is compounded by the need to account for uncertainty in the mass and inertia of manipulated objects, and potentially the robot itself. The present work addresses this challenge by proposing Autonomous Robust Manipulation via Optimization with Uncertainty-aware Reachability (ARMOUR), a provably-safe, receding-horizon trajectory planner and tracking controller framework for serial link manipulators. ARMOUR works by first constructing a robust, passivity-based controller that is proven to enable a manipulator to track desired trajectories with bounded error despite uncertain dynamics. Next, ARMOUR uses a novel variation on the Recursive Newton-Euler Algorithm (RNEA) to compute the set of all possible inputs required to track any trajectory within a continuum of desired trajectories. Finally, the method computes an over-approximation to the swept volume of the manipulator; this enables one to formulate an optimization problem, which can be solved in real-time, to synthesize provably-safe motion. The proposed method is compared to state of the art methods and demonstrated on a variety of challenging manipulation examples in simulation and on real hardware, such as maneuvering a dumbbell with uncertain mass around obstacles.
American Sign Language fingerspelling recognition in the wild
Oct 26, 2018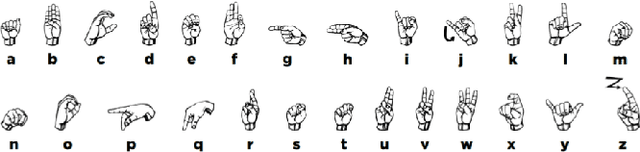
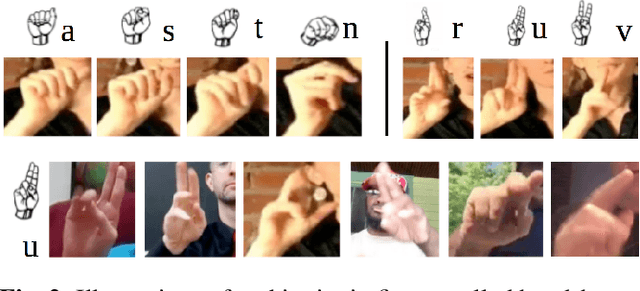
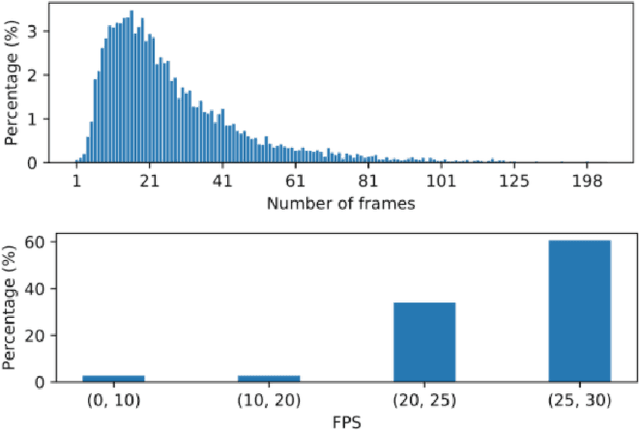
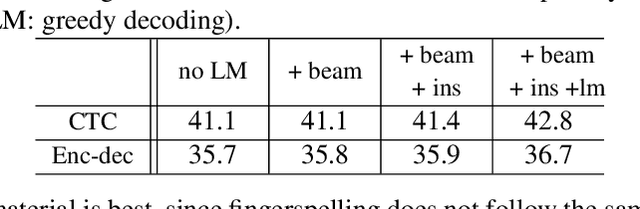
We address the problem of American Sign Language fingerspelling recognition in the wild, using videos collected from websites. We introduce the largest data set available so far for the problem of fingerspelling recognition, and the first using naturally occurring video data. Using this data set, we present the first attempt to recognize fingerspelling sequences in this challenging setting. Unlike prior work, our video data is extremely challenging due to low frame rates and visual variability. To tackle the visual challenges, we train a special-purpose signing hand detector using a small subset of our data. Given the hand detector output, a sequence model decodes the hypothesized fingerspelled letter sequence. For the sequence model, we explore attention-based recurrent encoder-decoders and CTC-based approaches. As the first attempt at fingerspelling recognition in the wild, this work is intended to serve as a baseline for future work on sign language recognition in realistic conditions. We find that, as expected, letter error rates are much higher than in previous work on more controlled data, and we analyze the sources of error and effects of model variants.