 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLet's Make a Splan: Risk-Aware Trajectory Optimization in a Normalized Gaussian Splat
Paper and Code
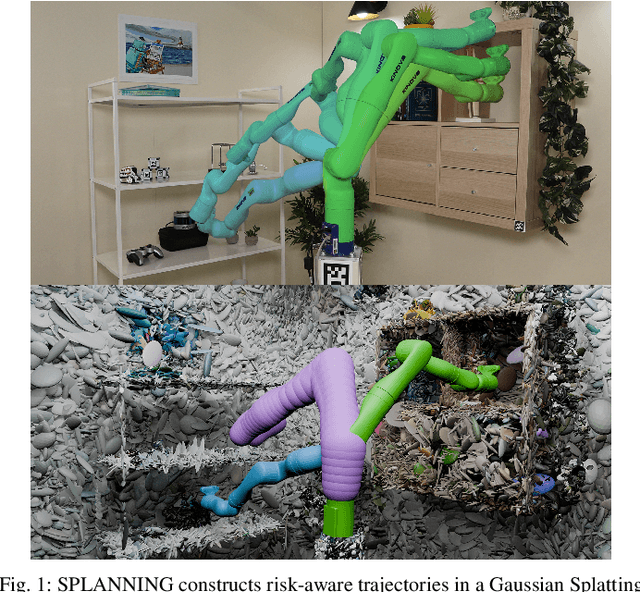
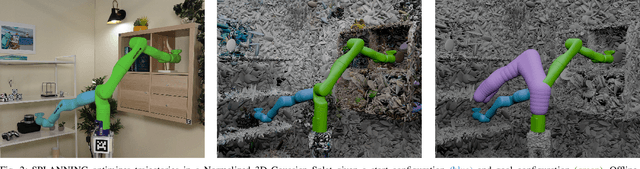
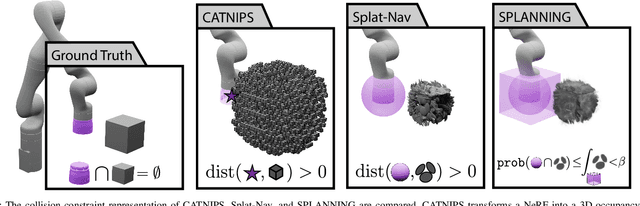
Neural Radiance Fields and Gaussian Splatting have transformed the field of computer vision by enabling photo-realistic representation of complex scenes. Despite this success, they have seen only limited use in real-world robotics tasks such as trajectory optimization. Two key factors have contributed to this limited success. First, it is challenging to reason about collisions in radiance models. Second, it is difficult to perform inference of radiance models fast enough for real-time trajectory synthesis. This paper addresses these challenges by proposing SPLANNING, a risk-aware trajectory optimizer that operates in a Gaussian Splatting model. This paper first derives a method for rigorously upper-bounding the probability of collision between a robot and a radiance field. Second, this paper introduces a normalized reformulation of Gaussian Splatting that enables the efficient computation of the collision bound in a Gaussian Splat. Third, a method is presented to optimize trajectories while avoiding collisions with a scene represented by a Gaussian Splat. Experiments demonstrate that SPLANNING outperforms state-of-the-art methods in generating collision-free trajectories in highly cluttered environments. The proposed system is also tested on a real-world robot manipulator. A project page is available at https://roahmlab.github.io/splanning.