 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLet's Make a Splan: Risk-Aware Trajectory Optimization in a Normalized Gaussian Splat
Sep 25, 2024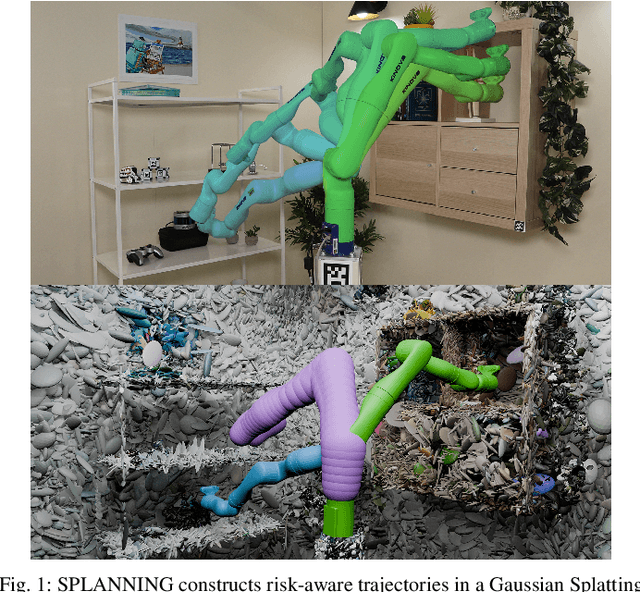
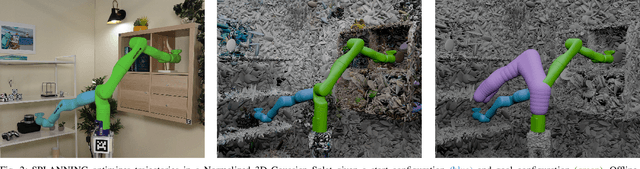
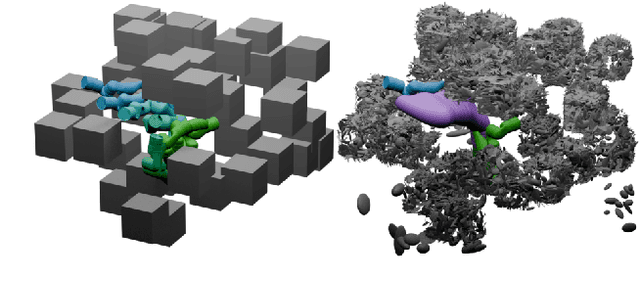
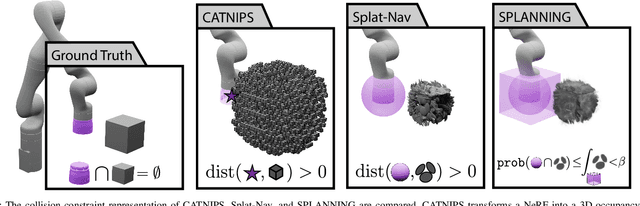
Neural Radiance Fields and Gaussian Splatting have transformed the field of computer vision by enabling photo-realistic representation of complex scenes. Despite this success, they have seen only limited use in real-world robotics tasks such as trajectory optimization. Two key factors have contributed to this limited success. First, it is challenging to reason about collisions in radiance models. Second, it is difficult to perform inference of radiance models fast enough for real-time trajectory synthesis. This paper addresses these challenges by proposing SPLANNING, a risk-aware trajectory optimizer that operates in a Gaussian Splatting model. This paper first derives a method for rigorously upper-bounding the probability of collision between a robot and a radiance field. Second, this paper introduces a normalized reformulation of Gaussian Splatting that enables the efficient computation of the collision bound in a Gaussian Splat. Third, a method is presented to optimize trajectories while avoiding collisions with a scene represented by a Gaussian Splat. Experiments demonstrate that SPLANNING outperforms state-of-the-art methods in generating collision-free trajectories in highly cluttered environments. The proposed system is also tested on a real-world robot manipulator. A project page is available at https://roahmlab.github.io/splanning.
Safe Planning for Articulated Robots Using Reachability-based Obstacle Avoidance With Spheres
Feb 13, 2024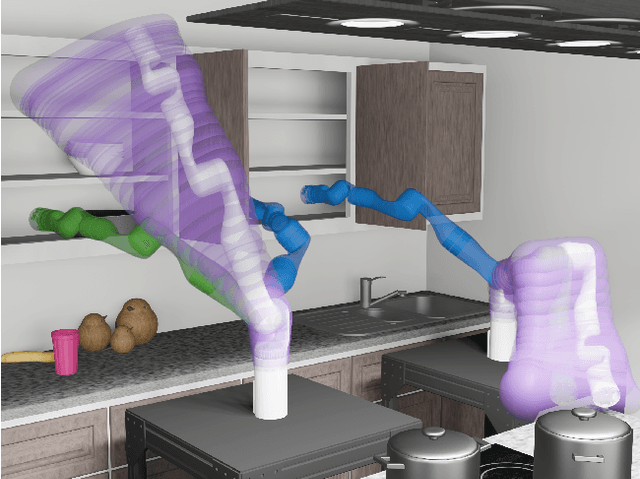
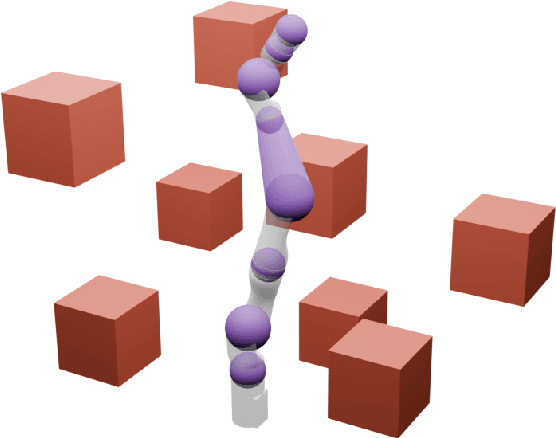
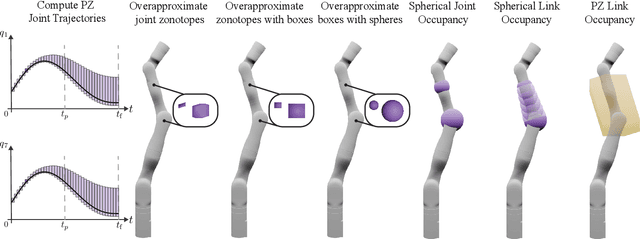
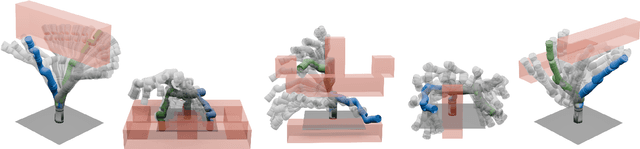
Generating safe motion plans in real-time is necessary for the wide-scale deployment of robots in unstructured and human-centric environments. These motion plans must be safe to ensure humans are not harmed and nearby objects are not damaged. However, they must also be generated in real-time to ensure the robot can quickly adapt to changes in the environment. Many trajectory optimization methods introduce heuristics that trade-off safety and real-time performance, which can lead to potentially unsafe plans. This paper addresses this challenge by proposing Safe Planning for Articulated Robots Using Reachability-based Obstacle Avoidance With Spheres (SPARROWS). SPARROWS is a receding-horizon trajectory planner that utilizes the combination of a novel reachable set representation and an exact signed distance function to generate provably-safe motion plans. At runtime, SPARROWS uses parameterized trajectories to compute reachable sets composed entirely of spheres that overapproximate the swept volume of the robot's motion. SPARROWS then performs trajectory optimization to select a safe trajectory that is guaranteed to be collision-free. We demonstrate that SPARROWS' novel reachable set is significantly less conservative than previous approaches. We also demonstrate that SPARROWS outperforms a variety of state-of-the-art methods in solving challenging motion planning tasks in cluttered environments. Code, data, and video demonstrations can be found at \url{https://roahmlab.github.io/sparrows/}.
Learning sources of variability from high-dimensional observational studies
Jul 26, 2023Causal inference studies whether the presence of a variable influences an observed outcome. As measured by quantities such as the "average treatment effect," this paradigm is employed across numerous biological fields, from vaccine and drug development to policy interventions. Unfortunately, the majority of these methods are often limited to univariate outcomes. Our work generalizes causal estimands to outcomes with any number of dimensions or any measurable space, and formulates traditional causal estimands for nominal variables as causal discrepancy tests. We propose a simple technique for adjusting universally consistent conditional independence tests and prove that these tests are universally consistent causal discrepancy tests. Numerical experiments illustrate that our method, Causal CDcorr, leads to improvements in both finite sample validity and power when compared to existing strategies. Our methods are all open source and available at github.com/ebridge2/cdcorr.
These Maps Are Made For Walking: Real-Time Terrain Property Estimation for Mobile Robots
May 25, 2022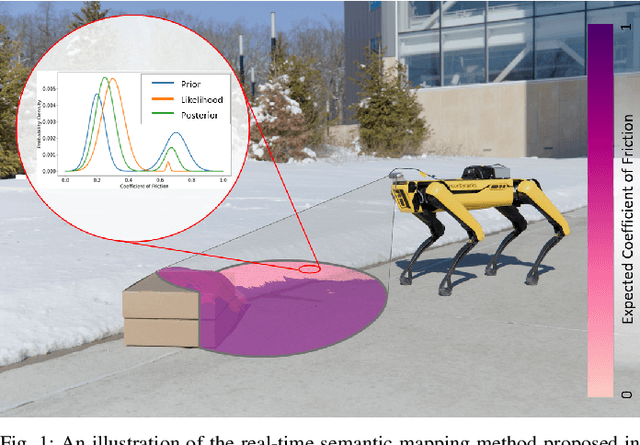
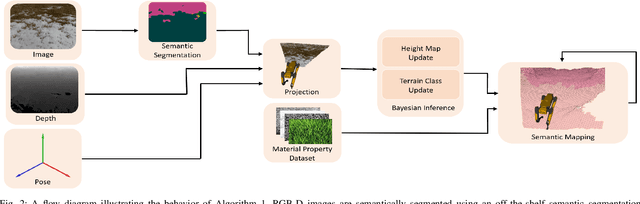
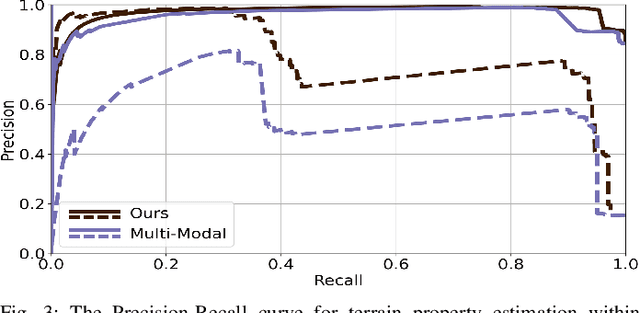
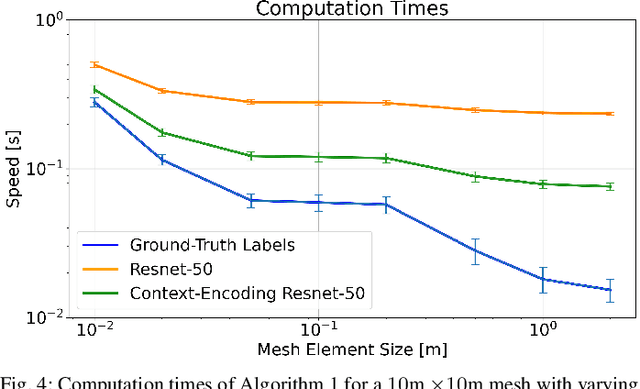
The equations of motion governing mobile robots are dependent on terrain properties such as the coefficient of friction, and contact model parameters. Estimating these properties is thus essential for robotic navigation. Ideally any map estimating terrain properties should run in real time, mitigate sensor noise, and provide probability distributions of the aforementioned properties, thus enabling risk-mitigating navigation and planning. This paper addresses these needs and proposes a Bayesian inference framework for semantic mapping which recursively estimates both the terrain surface profile and a probability distribution for terrain properties using data from a single RGB-D camera. The proposed framework is evaluated in simulation against other semantic mapping methods and is shown to outperform these state-of-the-art methods in terms of correctly estimating simulated ground-truth terrain properties when evaluated using a precision-recall curve and the Kullback-Leibler divergence test. Additionally, the proposed method is deployed on a physical legged robotic platform in both indoor and outdoor environments, and we show our method correctly predicts terrain properties in both cases. The proposed framework runs in real-time and includes a ROS interface for easy integration.
Analysis of Neural Fragility: Bounding the Norm of a Rank-One Perturbation Matrix
Feb 14, 2022Over 15 million epilepsy patients worldwide do not respond to drugs and require surgical treatment. Successful surgical treatment requires complete removal, or disconnection of the epileptogenic zone (EZ), but without a prospective biomarker of the EZ, surgical success rates vary between 30%-70%. Neural fragility is a model recently proposed to localize the EZ. Neural fragility is computed as the l2 norm of a structured rank-one perturbation of an estimated linear dynamical system. However, an analysis of its numerical properties have not been explored. We show that neural fragility is a well-defined model given a good estimator of the linear dynamical system from data. Specifically, we provide bounds on neural fragility as a function of the underlying linear system and noise.