 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConformalized Reachable Sets for Obstacle Avoidance With Spheres
Oct 13, 2024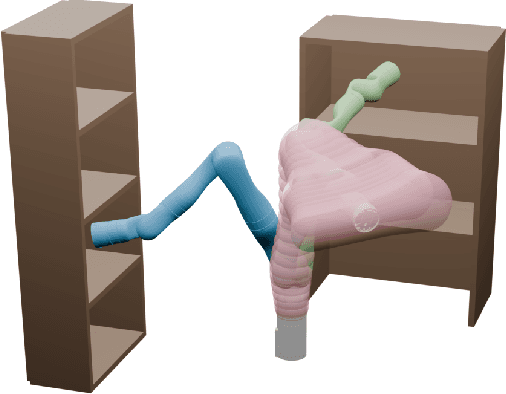
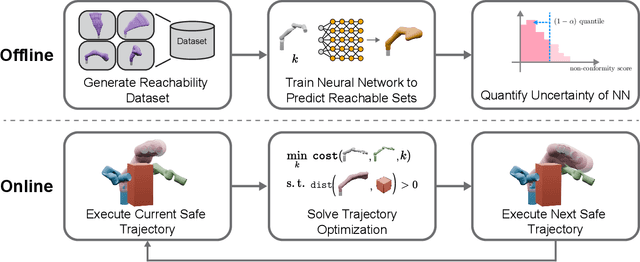
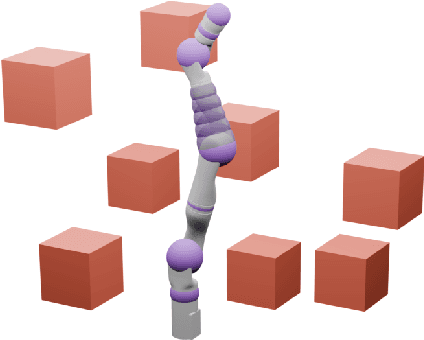
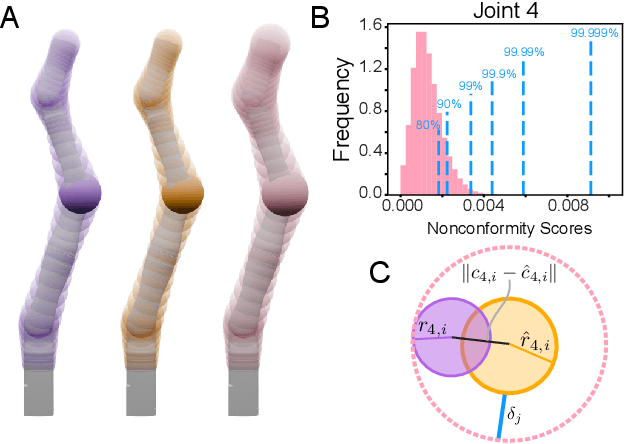
Safe motion planning algorithms are necessary for deploying autonomous robots in unstructured environments. Motion plans must be safe to ensure that the robot does not harm humans or damage any nearby objects. Generating these motion plans in real-time is also important to ensure that the robot can adapt to sudden changes in its environment. Many trajectory optimization methods introduce heuristics that balance safety and real-time performance, potentially increasing the risk of the robot colliding with its environment. This paper addresses this challenge by proposing Conformalized Reachable Sets for Obstacle Avoidance With Spheres (CROWS). CROWS is a novel real-time, receding-horizon trajectory planner that generates probalistically-safe motion plans. Offline, CROWS learns a novel neural network-based representation of a spherebased reachable set that overapproximates the swept volume of the robot's motion. CROWS then uses conformal prediction to compute a confidence bound that provides a probabilistic safety guarantee on the learned reachable set. At runtime, CROWS performs trajectory optimization to select a trajectory that is probabilstically-guaranteed to be collision-free. We demonstrate that CROWS outperforms a variety of state-of-the-art methods in solving challenging motion planning tasks in cluttered environments while remaining collision-free. Code, data, and video demonstrations can be found at https://roahmlab.github.io/crows/
On the Spatial-Wideband Effects in Millimeter-Wave Cell-Free Massive MIMO
Jul 06, 2023
In this paper, we investigate the spatial-wideband effects in cell-free massive MIMO (CF-mMIMO) systems in mmWave bands. The utilization of mmWave frequencies brings challenges such as signal attenuation and the need for denser networks like ultra-dense networks (UDN) to maintain communication performance. CF-mMIMO is introduced as a solution, where distributed access points (APs) transmit signals to a central processing unit (CPU) for joint processing. CF-mMIMO offers advantages in reducing non-line-of-sight (NLOS) conditions and overcoming signal blockage. We investigate the synchronization problem in CF-mMIMO due to time delays between APs. It proposes a minimum cyclic prefix length to mitigate inter-symbol interference (ISI) in OFDM systems. Furthermore, the spatial correlations of channel responses are analyzed in the frequency-phase domain. The impact of these correlations on system performance is examined. The findings contribute to improving the performance of CF-mMIMO systems and enhancing the effective utilization of mmWave communication.
Reachability-based Trajectory Design with Neural Implicit Safety Constraints
Feb 14, 2023



Generating safe motion plans in real-time is a key requirement for deploying robot manipulators to assist humans in collaborative settings. In particular, robots must satisfy strict safety requirements to avoid self-damage or harming nearby humans. Satisfying these requirements is particularly challenging if the robot must also operate in real-time to adjust to changes in its environment.This paper addresses these challenges by proposing Reachability-based Signed Distance Functions (RDFs) as a neural implicit representation for robot safety. RDF, which can be constructed using supervised learning in a tractable fashion, accurately predicts the distance between the swept volume of a robot arm and an obstacle. RDF's inference and gradient computations are fast and scale linearly with the dimension of the system; these features enable its use within a novel real-time trajectory planning framework as a continuous-time collision-avoidance constraint. The planning method using RDF is compared to a variety of state-of-the-art techniques and is demonstrated to successfully solve challenging motion planning tasks for high-dimensional systems faster and more reliably than all tested methods.
Communication-Efficient Diffusion Strategy for Performance Improvement of Federated Learning with Non-IID Data
Jul 15, 2022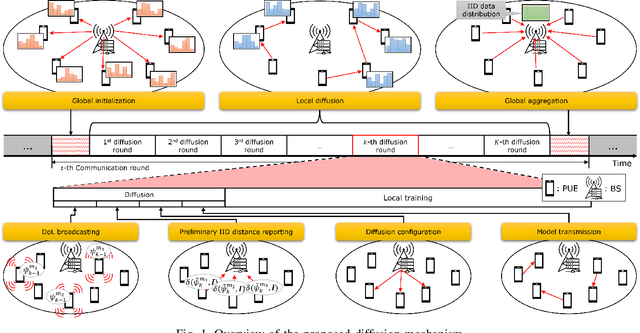
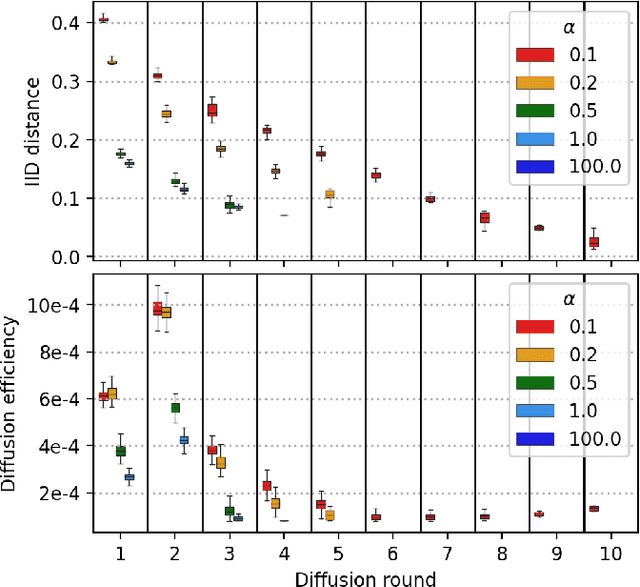
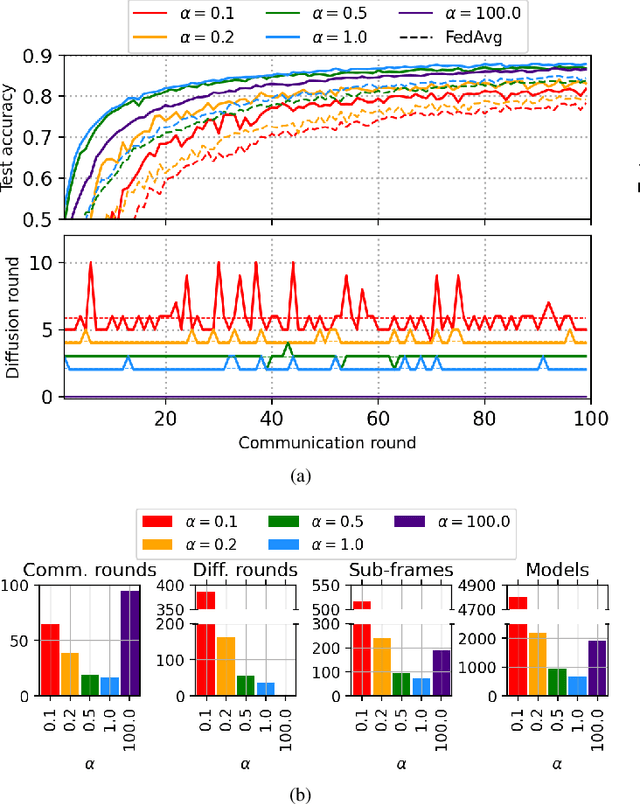
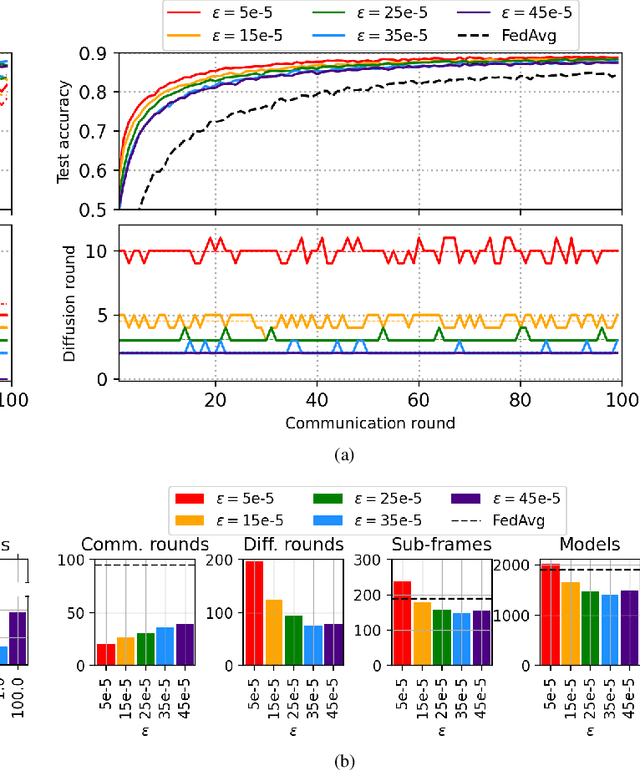
Federated learning (FL) is a novel learning paradigm that addresses the privacy leakage challenge of centralized learning. However, in FL, users with non-independent and identically distributed (non-IID) characteristics can deteriorate the performance of the global model. Specifically, the global model suffers from the weight divergence challenge owing to non-IID data. To address the aforementioned challenge, we propose a novel diffusion strategy of the machine learning (ML) model (FedDif) to maximize the FL performance with non-IID data. In FedDif, users spread local models to neighboring users over D2D communications. FedDif enables the local model to experience different distributions before parameter aggregation. Furthermore, we theoretically demonstrate that FedDif can circumvent the weight divergence challenge. On the theoretical basis, we propose the communication-efficient diffusion strategy of the ML model, which can determine the trade-off between the learning performance and communication cost based on auction theory. The performance evaluation results show that FedDif improves the test accuracy of the global model by 11% compared to the baseline FL with non-IID settings. Moreover, FedDif improves communication efficiency in perspective of the number of transmitted sub-frames and models by 2.77 folds than the latest methods