 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEgoEngine: From Egocentric Human Videos to High-Fidelity Dexterous Robot Demonstrations
Jun 10, 2026Dexterous manipulation is limited by the cost of collecting large-scale robot demonstrations. Egocentric human videos offer a scalable source of diverse manipulation behaviors, but directly using them for robot learning requires bridging two gaps: the visual gap between human and robot observations, and the action gap between human motion and robot-executable action. We propose EgoEngine, a scalable framework for transforming egocentric human manipulation videos into high-fidelity robot data. Given an egocentric RGB video, EgoEngine produces: (i) a high-fidelity robot observation video replacing human with robot while preserving scene context and temporal alignment, and (ii) a task-aligned, executable robot action trajectory under feasibility constraints. Experiments in simulation and on real robots show that EgoEngine enables scalable conversion of human videos into robot data and, to our knowledge, demonstrates the first zero-shot visuomotor dexterous policy learning from egocentric human videos without real-robot demonstrations. Project website: https://egoengine.github.io.
From Inference Efficiency to Embodied Efficiency: Revisiting Efficiency Metrics for Vision-Language-Action Models
Mar 19, 2026Vision-Language-Action (VLA) models have recently enabled embodied agents to perform increasingly complex tasks by jointly reasoning over visual, linguistic, and motor modalities. However, we find that the prevailing notion of ``efficiency'' in current VLA research, characterized by parameters, FLOPs, or token decoding throughput, does not reflect actual performance on robotic platforms. In real-world execution, efficiency is determined by system-level embodied behaviors such as task completion time, trajectory smoothness, cumulative joint rotation, and motion energy. Through controlled studies across model compression, token sparsification, and action sequence compression, we make several observations that challenge common assumptions. (1) Methods that reduce computation under conventional metrics often increase end-to-end execution cost or degrade motion quality, despite maintaining task success rates. (2) System-level embodied efficiency metrics reveal performance differences in the learned action policies that remain hidden under conventional evaluations. (3) Common adaptation methods such as in-context prompting or supervised fine-tuning show only mild and metric-specific improvements in embodied efficiency. While these methods can reduce targeted embodied-efficiency metrics such as jerk or action rate, the resulting gains may come with trade-offs in other metrics, such as longer completion time. Taken together, our results suggest that conventional inference efficiency metrics can overlook important aspects of embodied execution. Incorporating embodied efficiency provides a more complete view of policy behavior and practical performance, enabling fairer and more comprehensive comparisons of VLA models.
ReSteer: Quantifying and Refining the Steerability of Multitask Robot Policies
Mar 18, 2026Despite strong multi-task pretraining, existing policies often exhibit poor task steerability. For example, a robot may fail to respond to a new instruction ``put the bowl in the sink" when moving towards the oven, executing ``close the oven", even though it can complete both tasks when executed separately. We propose ReSteer, a framework to quantify and improve task steerability in multitask robot policies. We conduct an exhaustive evaluation of state-of-the-art policies, revealing a common lack of steerability. We find that steerability is associated with limited overlap among training task trajectory distributions, and introduce a proxy metric to measure this overlap from policy behavior. Building on this insight, ReSteer improves steerability via three components: (i) a steerability estimator that identifies low-steerability states without full-rollout evaluation, (ii) a steerable data generator that synthesizes motion segments from these states, and (iii) a self-refinement pipeline that improves policy steerability using the generated data. In simulation on LIBERO, ReSteer improves steerability by 11\% over 18k rollouts. In real-world experiments, we show that improved steerability is critical for interactive use, enabling users to instruct robots to perform any task at any time. We hope this work motivates further study on quantifying steerability and data collection strategies for large robot policies.
A Closed-Form Geometric Retargeting Solver for Upper Body Humanoid Robot Teleoperation
Feb 02, 2026Retargeting human motion to robot poses is a practical approach for teleoperating bimanual humanoid robot arms, but existing methods can be suboptimal and slow, often causing undesirable motion or latency. This is due to optimizing to match robot end-effector to human hand position and orientation, which can also limit the robot's workspace to that of the human. Instead, this paper reframes retargeting as an orientation alignment problem, enabling a closed-form, geometric solution algorithm with an optimality guarantee. The key idea is to align a robot arm to a human's upper and lower arm orientations, as identified from shoulder, elbow, and wrist (SEW) keypoints; hence, the method is called SEW-Mimic. The method has fast inference (3 kHz) on standard commercial CPUs, leaving computational overhead for downstream applications; an example in this paper is a safety filter to avoid bimanual self-collision. The method suits most 7-degree-of-freedom robot arms and humanoids, and is agnostic to input keypoint source. Experiments show that SEW-Mimic outperforms other retargeting methods in computation time and accuracy. A pilot user study suggests that the method improves teleoperation task success. Preliminary analysis indicates that data collected with SEW-Mimic improves policy learning due to being smoother. SEW-Mimic is also shown to be a drop-in way to accelerate full-body humanoid retargeting. Finally, hardware demonstrations illustrate SEW-Mimic's practicality. The results emphasize the utility of SEW-Mimic as a fundamental building block for bimanual robot manipulation and humanoid robot teleoperation.
SAIL: Faster-than-Demonstration Execution of Imitation Learning Policies
Jun 13, 2025Offline Imitation Learning (IL) methods such as Behavior Cloning are effective at acquiring complex robotic manipulation skills. However, existing IL-trained policies are confined to executing the task at the same speed as shown in demonstration data. This limits the task throughput of a robotic system, a critical requirement for applications such as industrial automation. In this paper, we introduce and formalize the novel problem of enabling faster-than-demonstration execution of visuomotor policies and identify fundamental challenges in robot dynamics and state-action distribution shifts. We instantiate the key insights as SAIL (Speed Adaptation for Imitation Learning), a full-stack system integrating four tightly-connected components: (1) a consistency-preserving action inference algorithm for smooth motion at high speed, (2) high-fidelity tracking of controller-invariant motion targets, (3) adaptive speed modulation that dynamically adjusts execution speed based on motion complexity, and (4) action scheduling to handle real-world system latencies. Experiments on 12 tasks across simulation and two real, distinct robot platforms show that SAIL achieves up to a 4x speedup over demonstration speed in simulation and up to 3.2x speedup in the real world. Additional detail is available at https://nadunranawaka1.github.io/sail-policy
DemoGen: Synthetic Demonstration Generation for Data-Efficient Visuomotor Policy Learning
Feb 24, 2025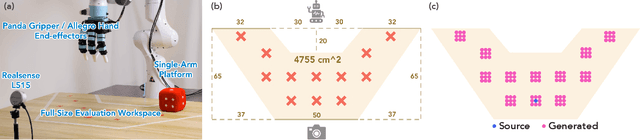
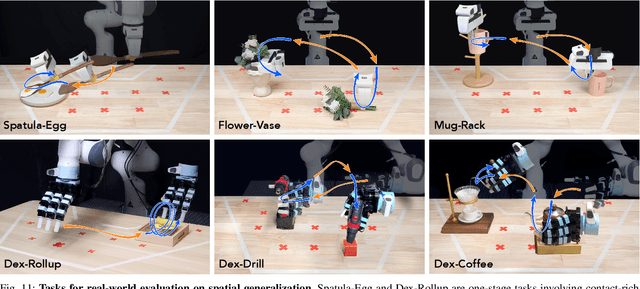
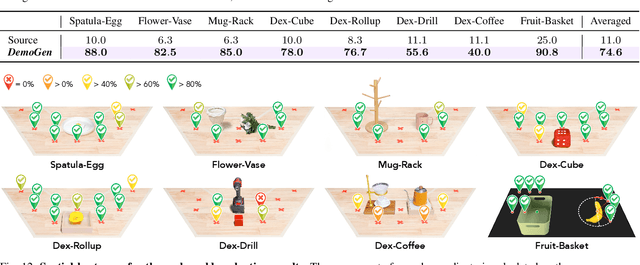
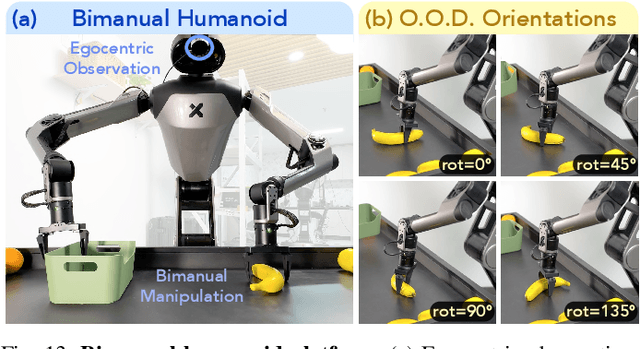
Visuomotor policies have shown great promise in robotic manipulation but often require substantial amounts of human-collected data for effective performance. A key reason underlying the data demands is their limited spatial generalization capability, which necessitates extensive data collection across different object configurations. In this work, we present DemoGen, a low-cost, fully synthetic approach for automatic demonstration generation. Using only one human-collected demonstration per task, DemoGen generates spatially augmented demonstrations by adapting the demonstrated action trajectory to novel object configurations. Visual observations are synthesized by leveraging 3D point clouds as the modality and rearranging the subjects in the scene via 3D editing. Empirically, DemoGen significantly enhances policy performance across a diverse range of real-world manipulation tasks, showing its applicability even in challenging scenarios involving deformable objects, dexterous hand end-effectors, and bimanual platforms. Furthermore, DemoGen can be extended to enable additional out-of-distribution capabilities, including disturbance resistance and obstacle avoidance.
Catch It! Learning to Catch in Flight with Mobile Dexterous Hands
Sep 16, 2024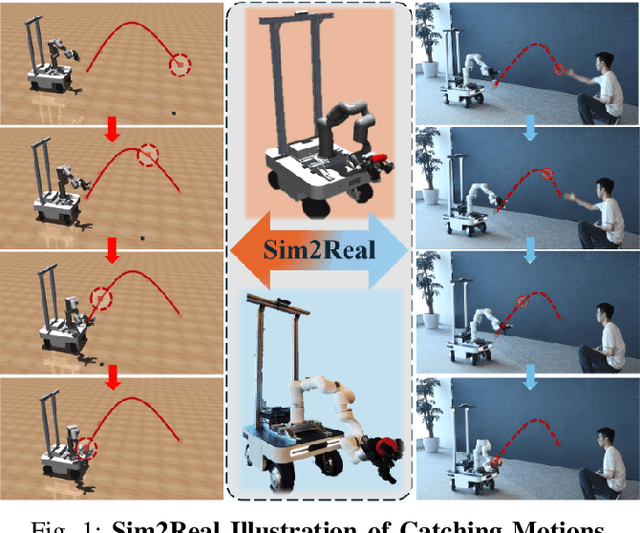

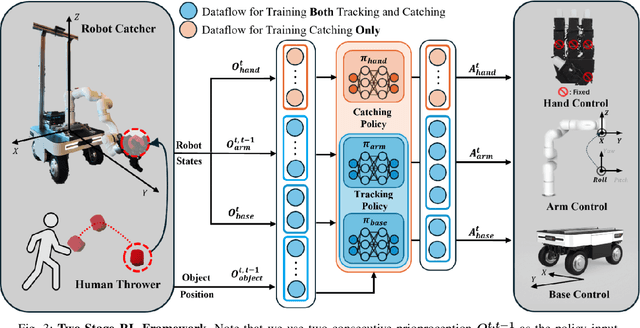
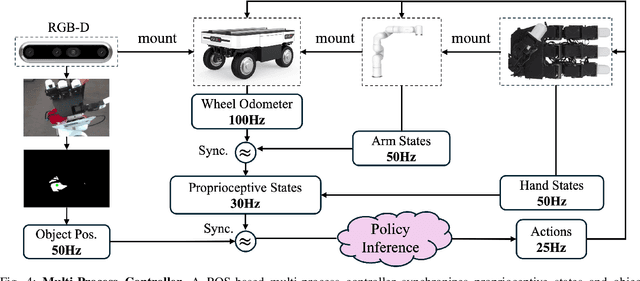
Catching objects in flight (i.e., thrown objects) is a common daily skill for humans, yet it presents a significant challenge for robots. This task requires a robot with agile and accurate motion, a large spatial workspace, and the ability to interact with diverse objects. In this paper, we build a mobile manipulator composed of a mobile base, a 6-DoF arm, and a 12-DoF dexterous hand to tackle such a challenging task. We propose a two-stage reinforcement learning framework to efficiently train a whole-body-control catching policy for this high-DoF system in simulation. The objects' throwing configurations, shapes, and sizes are randomized during training to enhance policy adaptivity to various trajectories and object characteristics in flight. The results show that our trained policy catches diverse objects with randomly thrown trajectories, at a high success rate of about 80\% in simulation, with a significant improvement over the baselines. The policy trained in simulation can be directly deployed in the real world with onboard sensing and computation, which achieves catching sandbags in various shapes, randomly thrown by humans. Our project page is available at https://mobile-dex-catch.github.io/.
Learning Prehensile Dexterity by Imitating and Emulating State-only Observations
Apr 12, 2024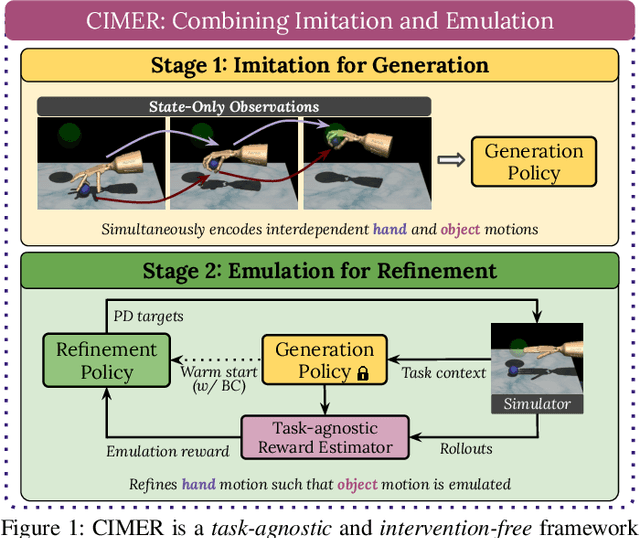
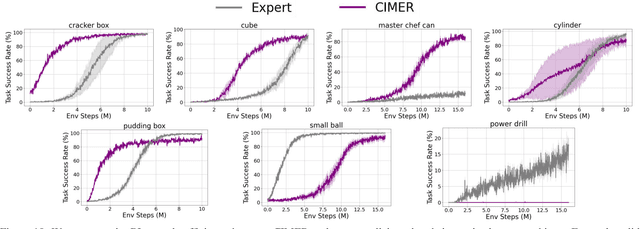
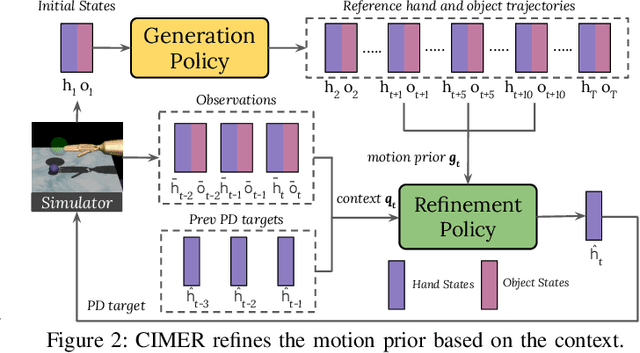
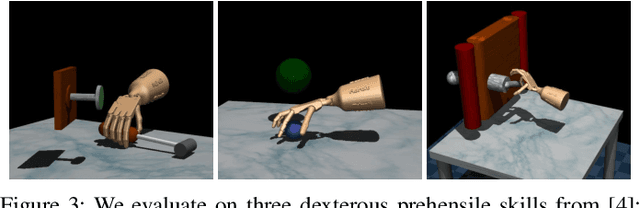
When human acquire physical skills (e.g., tennis) from experts, we tend to first learn from merely observing the expert. But this is often insufficient. We then engage in practice, where we try to emulate the expert and ensure that our actions produce similar effects on our environment. Inspired by this observation, we introduce Combining IMitation and Emulation for Motion Refinement (CIMER) -- a two-stage framework to learn dexterous prehensile manipulation skills from state-only observations. CIMER's first stage involves imitation: simultaneously encode the complex interdependent motions of the robot hand and the object in a structured dynamical system. This results in a reactive motion generation policy that provides a reasonable motion prior, but lacks the ability to reason about contact effects due to the lack of action labels. The second stage involves emulation: learn a motion refinement policy via reinforcement that adjusts the robot hand's motion prior such that the desired object motion is reenacted. CIMER is both task-agnostic (no task-specific reward design or shaping) and intervention-free (no additional teleoperated or labeled demonstrations). Detailed experiments with prehensile dexterity reveal that i) imitation alone is insufficient, but adding emulation drastically improves performance, ii) CIMER outperforms existing methods in terms of sample efficiency and the ability to generate realistic and stable motions, iii) CIMER can either zero-shot generalize or learn to adapt to novel objects from the YCB dataset, even outperforming expert policies trained with action labels in most cases. Source code and videos are available at https://sites.google.com/view/cimer-2024/.
Efficient Belief Road Map for Planning Under Uncertainty
Sep 17, 2023Robotic systems, particularly in demanding environments like narrow corridors or disaster zones, often grapple with imperfect state estimation. Addressing this challenge requires a trajectory plan that not only navigates these restrictive spaces but also manages the inherent uncertainty of the system. We present a novel approach for graph-based belief space planning via the use of an efficient covariance control algorithm. By adaptively steering state statistics via output state feedback, we efficiently craft a belief roadmap characterized by nodes with controlled uncertainty and edges representing collision-free mean trajectories. The roadmap's structured design then paves the way for precise path searches that balance control costs and uncertainty considerations. Our numerical experiments affirm the efficacy and advantage of our method in different motion planning tasks. Our open-source implementation can be found at https://github.com/hzyu17/VIMP/tree/BRM.
Graph Attention Collaborative Similarity Embedding for Recommender System
Feb 05, 2021
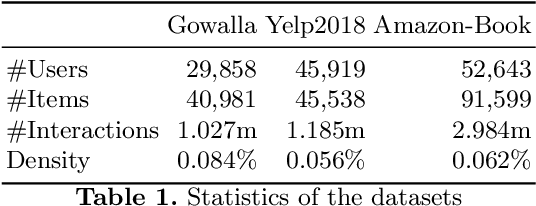

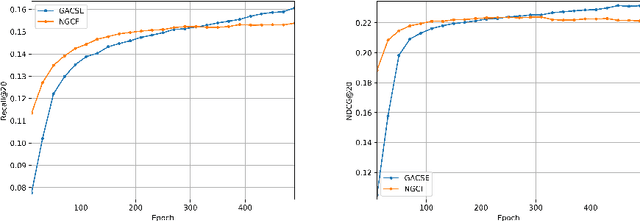
We present Graph Attention Collaborative Similarity Embedding (GACSE), a new recommendation framework that exploits collaborative information in the user-item bipartite graph for representation learning. Our framework consists of two parts: the first part is to learn explicit graph collaborative filtering information such as user-item association through embedding propagation with attention mechanism, and the second part is to learn implicit graph collaborative information such as user-user similarities and item-item similarities through auxiliary loss. We design a new loss function that combines BPR loss with adaptive margin and similarity loss for the similarities learning. Extensive experiments on three benchmarks show that our model is consistently better than the latest state-of-the-art models.