 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElastic ODYN: Differentiable Optimization for Infeasible Control and Learning in Robotics
Jun 15, 2026Robotic systems routinely encounter conflicting objectives, modeling errors, and degenerate contact conditions that render quadratic programs (QPs) infeasible. Yet most optimization solvers and differentiable QP layers assume feasibility, leading to numerical failures, unstable gradients, or solver breakdown when constraints cannot be simultaneously satisfied. We present Elastic ODYN, a primal--dual non-interior-point QP solver that handles infeasibility through smooth squared-$\ell_2$ elastic relaxations. The resulting formulation remains well posed under ill-conditioning and degeneracy, supports warm starting, and converges to closest-to-feasible solutions when no feasible point exists. A lightweight refinement stage recovers physically meaningful dual variables from the elastic solution. Building on this framework, we develop Elastic OdynLayer, a differentiable QP layer with stable gradients under infeasibility, and Elastic OdynSQP, an infeasibility-aware SQP method that resolves inconsistent subproblems and intrinsically infeasible optimal control tasks through selective constraint relaxation. We evaluate the framework on benchmark QPs, singular contact mechanics, differentiable parameter identification, and quadrupedal and humanoid trajectory optimization. Across all settings, Elastic ODYN consistently outperforms state-of-the-art elastic QP solvers in robustness, warm-start performance, and convergence reliability, enabling optimization, simulation, control, and learning beyond the feasibility assumptions of existing methods.
System Identification under Constraints and Disturbance: A Bayesian Estimation Approach
Feb 18, 2026We introduce a Bayesian system identification (SysID) framework for jointly estimating robot's state trajectories and physical parameters with high accuracy. It embeds physically consistent inverse dynamics, contact and loop-closure constraints, and fully featured joint friction models as hard, stage-wise equality constraints. It relies on energy-based regressors to enhance parameter observability, supports both equality and inequality priors on inertial and actuation parameters, enforces dynamically consistent disturbance projections, and augments proprioceptive measurements with energy observations to disambiguate nonlinear friction effects. To ensure scalability, we derive a parameterized equality-constrained Riccati recursion that preserves the banded structure of the problem, achieving linear complexity in the time horizon, and develop computationally efficient derivatives. Simulation studies on representative robotic systems, together with hardware experiments on a Unitree B1 equipped with a Z1 arm, demonstrate faster convergence, lower inertial and friction estimation errors, and improved contact consistency compared to forward-dynamics and decoupled identification baselines. When deployed within model predictive control frameworks, the resulting models yield measurable improvements in tracking performance during locomotion over challenging environments.
ODYN: An All-Shifted Non-Interior-Point Method for Quadratic Programming in Robotics and AI
Feb 17, 2026We introduce ODYN, a novel all-shifted primal-dual non-interior-point quadratic programming (QP) solver designed to efficiently handle challenging dense and sparse QPs. ODYN combines all-shifted nonlinear complementarity problem (NCP) functions with proximal method of multipliers to robustly address ill-conditioned and degenerate problems, without requiring linear independence of the constraints. It exhibits strong warm-start performance and is well suited to both general-purpose optimization, and robotics and AI applications, including model-based control, estimation, and kernel-based learning methods. We provide an open-source implementation and benchmark ODYN on the Maros-Mészáros test set, demonstrating state-of-the-art convergence performance in small-to-high-scale problems. The results highlight ODYN's superior warm-starting capabilities, which are critical in sequential and real-time settings common in robotics and AI. These advantages are further demonstrated by deploying ODYN as the backend of an SQP-based predictive control framework (OdynSQP), as the implicitly differentiable optimization layer for deep learning (ODYNLayer), and the optimizer of a contact-dynamics simulation (ODYNSim).
Endpoint-Explicit Differential Dynamic Programming via Exact Resolution
Mar 05, 2025



We introduce a novel method for handling endpoint constraints in constrained differential dynamic programming (DDP). Unlike existing approaches, our method guarantees quadratic convergence and is exact, effectively managing rank deficiencies in both endpoint and stagewise equality constraints. It is applicable to both forward and inverse dynamics formulations, making it particularly well-suited for model predictive control (MPC) applications and for accelerating optimal control (OC) solvers. We demonstrate the efficacy of our approach across a broad range of robotics problems and provide a user-friendly open-source implementation within CROCODDYL.
* 7 pages, IEEE ICRA paper
Multi-Contact Inertial Estimation and Localization in Legged Robots
Mar 25, 2024



Optimal estimation is a promising tool for multi-contact inertial estimation and localization. To harness its advantages in robotics, it is crucial to solve these large and challenging optimization problems efficiently. To tackle this, we (i) develop a multiple-shooting solver that exploits both temporal and parametric structures through a parametrized Riccati recursion. Additionally, we (ii) propose an inertial local manifold that ensures its full physical consistency. It also enhances convergence compared to the singularity-free log-Cholesky approach. To handle its singularities, we (iii) introduce a nullspace approach in our optimal estimation solver. We (iv) finally develop the analytical derivatives of contact dynamics for both inertial parametrizations. Our framework can successfully solve estimation problems for complex maneuvers such as brachiation in humanoids. We demonstrate its numerical capabilities across various robotics tasks and its benefits in experimental trials with the Go1 robot.
Morphological Symmetries in Robotics
Feb 23, 2024We present a comprehensive framework for studying and leveraging morphological symmetries in robotic systems. These are intrinsic properties of the robot's morphology, frequently observed in animal biology and robotics, which stem from the replication of kinematic structures and the symmetrical distribution of mass. We illustrate how these symmetries extend to the robot's state space and both proprioceptive and exteroceptive sensor measurements, resulting in the equivariance of the robot's equations of motion and optimal control policies. Thus, we recognize morphological symmetries as a relevant and previously unexplored physics-informed geometric prior, with significant implications for both data-driven and analytical methods used in modeling, control, estimation and design in robotics. For data-driven methods, we demonstrate that morphological symmetries can enhance the sample efficiency and generalization of machine learning models through data augmentation, or by applying equivariant/invariant constraints on the model's architecture. In the context of analytical methods, we employ abstract harmonic analysis to decompose the robot's dynamics into a superposition of lower-dimensional, independent dynamics. We substantiate our claims with both synthetic and real-world experiments conducted on bipedal and quadrupedal robots. Lastly, we introduce the repository MorphoSymm to facilitate the practical use of the theory and applications outlined in this work.
Dynamics Harmonic Analysis of Robotic Systems: Application in Data-Driven Koopman Modelling
Dec 12, 2023


We introduce the use of harmonic analysis to decompose the state space of symmetric robotic systems into orthogonal isotypic subspaces. These are lower-dimensional spaces that capture distinct, symmetric, and synergistic motions. For linear dynamics, we characterize how this decomposition leads to a subdivision of the dynamics into independent linear systems on each subspace, a property we term dynamics harmonic analysis (DHA). To exploit this property, we use Koopman operator theory to propose an equivariant deep-learning architecture that leverages the properties of DHA to learn a global linear model of system dynamics. Our architecture, validated on synthetic systems and the dynamics of locomotion of a quadrupedal robot, demonstrates enhanced generalization, sample efficiency, and interpretability, with less trainable parameters and computational costs.
Optimal Control for Articulated Soft Robots
Jun 02, 2023



Soft robots can execute tasks with safer interactions. However, control techniques that can effectively exploit the systems' capabilities are still missing. Differential dynamic programming (DDP) has emerged as a promising tool for achieving highly dynamic tasks. But most of the literature deals with applying DDP to articulated soft robots by using numerical differentiation, in addition to using pure feed-forward control to perform explosive tasks. Further, underactuated compliant robots are known to be difficult to control and the use of DDP-based algorithms to control them is not yet addressed. We propose an efficient DDP-based algorithm for trajectory optimization of articulated soft robots that can optimize the state trajectory, input torques, and stiffness profile. We provide an efficient method to compute the forward dynamics and the analytical derivatives of series elastic actuators (SEA)/variable stiffness actuators (VSA) and underactuated compliant robots. We present a state-feedback controller that uses locally optimal feedback policies obtained from DDP. We show through simulations and experiments that the use of feedback is crucial in improving the performance and stabilization properties of various tasks. We also show that the proposed method can be used to plan and control underactuated compliant robots, with varying degrees of underactuation effectively.
Perceptive Locomotion through Whole-Body MPC and Optimal Region Selection
May 15, 2023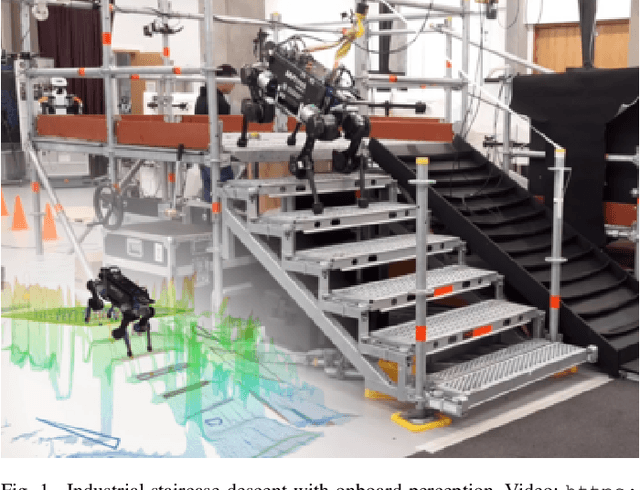
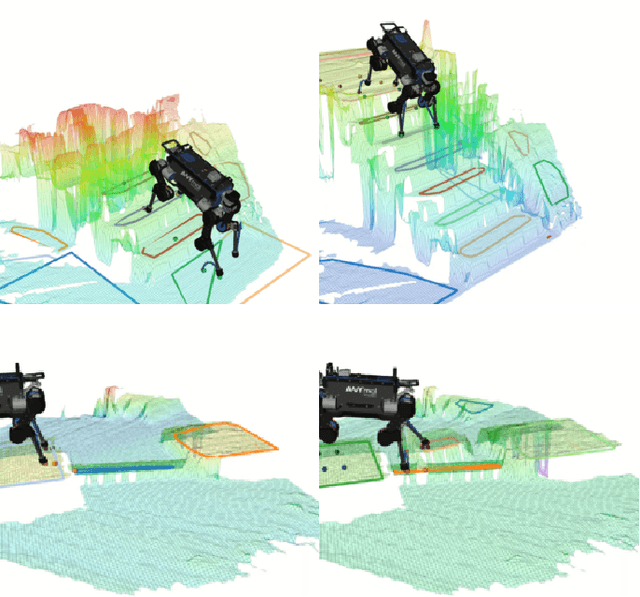

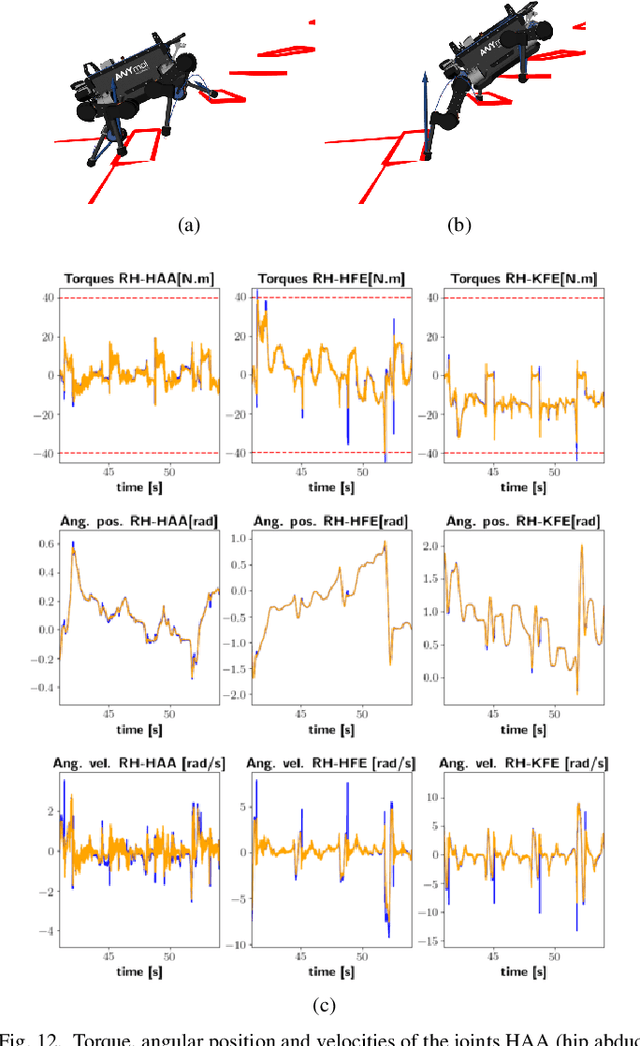
Real-time synthesis of legged locomotion maneuvers in challenging industrial settings is still an open problem, requiring simultaneous determination of footsteps locations several steps ahead while generating whole-body motions close to the robot's limits. State estimation and perception errors impose the practical constraint of fast re-planning motions in a model predictive control (MPC) framework. We first observe that the computational limitation of perceptive locomotion pipelines lies in the combinatorics of contact surface selection. Re-planning contact locations on selected surfaces can be accomplished at MPC frequencies (50-100 Hz). Then, whole-body motion generation typically follows a reference trajectory for the robot base to facilitate convergence. We propose removing this constraint to robustly address unforeseen events such as contact slipping, by leveraging a state-of-the-art whole-body MPC (Croccodyl). Our contributions are integrated into a complete framework for perceptive locomotion, validated under diverse terrain conditions, and demonstrated in challenging trials that push the robot's actuation limits, as well as in the ICRA 2023 quadruped challenge simulation.
Topology-Based MPC for Automatic Footstep Placement and Contact Surface Selection
Mar 24, 2023



State-of-the-art approaches to footstep planning assume reduced-order dynamics when solving the combinatorial problem of selecting contact surfaces in real time. However, in exchange for computational efficiency, these approaches ignore joint torque limits and limb dynamics. In this work, we address these limitations by presenting a topology-based approach that enables~\gls{mpc} to simultaneously plan full-body motions, torque commands, footstep placements, and contact surfaces in real time. To determine if a robot's foot is inside a contact surface, we borrow the winding number concept from topology. We then use this winding number and potential field to create a contact-surface penalty function. By using this penalty function,~\gls{mpc} can select a contact surface from all candidate surfaces in the vicinity and determine footstep placements within it. We demonstrate the benefits of our approach by showing the impact of considering full-body dynamics, which includes joint torque limits and limb dynamics, on the selection of footstep placements and contact surfaces. Furthermore, we validate the feasibility of deploying our topology-based approach in an~\gls{mpc} scheme and explore its potential capabilities through a series of experimental and simulation trials.
* 7 pages, 6 figures