 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBotany Meets Robotics in Alpine Scree Monitoring
Nov 16, 2025According to the European Union's Habitat Directive, habitat monitoring plays a critical role in response to the escalating problems posed by biodiversity loss and environmental degradation. Scree habitats, hosting unique and often endangered species, face severe threats from climate change due to their high-altitude nature. Traditionally, their monitoring has required highly skilled scientists to conduct extensive fieldwork in remote, potentially hazardous locations, making the process resource-intensive and time-consuming. This paper presents a novel approach for scree habitat monitoring using a legged robot to assist botanists in data collection and species identification. Specifically, we deployed the ANYmal C robot in the Italian Alpine bio-region in two field campaigns spanning two years and leveraged deep learning to detect and classify key plant species of interest. Our results demonstrate that agile legged robots can navigate challenging terrains and increase the frequency and efficiency of scree monitoring. When paired with traditional phytosociological surveys performed by botanists, this robotics-assisted protocol not only streamlines field operations but also enhances data acquisition, storage, and usage. The outcomes of this research contribute to the evolving landscape of robotics in environmental science, paving the way for a more comprehensive and sustainable approach to habitat monitoring and preservation.
SoFFT: Spatial Fourier Transform for Modeling Continuum Soft Robots
Feb 24, 2025



Continuum soft robots, composed of flexible materials, exhibit theoretically infinite degrees of freedom, enabling notable adaptability in unstructured environments. Cosserat Rod Theory has emerged as a prominent framework for modeling these robots efficiently, representing continuum soft robots as time-varying curves, known as backbones. In this work, we propose viewing the robot's backbone as a signal in space and time, applying the Fourier transform to describe its deformation compactly. This approach unifies existing modeling strategies within the Cosserat Rod Theory framework, offering insights into commonly used heuristic methods. Moreover, the Fourier transform enables the development of a data-driven methodology to experimentally capture the robot's deformation. The proposed approach is validated through numerical simulations and experiments on a real-world prototype, demonstrating a reduction in the degrees of freedom while preserving the accuracy of the deformation representation.
Underactuated dexterous robotic grasping with reconfigurable passive joints
Jan 27, 2025We introduce a novel reconfigurable passive joint (RP-joint), which has been implemented and tested on an underactuated three-finger robotic gripper. RP-joint has no actuation, but instead it is lightweight and compact. It can be easily reconfigured by applying external forces and locked to perform complex dexterous manipulation tasks, but only after tension is applied to the connected tendon. Additionally, we present an approach that allows learning dexterous grasps from single examples with underactuated grippers and automatically configures the RP-joints for dexterous manipulation. This is enhanced by integrating kinaesthetic contact optimization, which improves grasp performance even further. The proposed RP-joint gripper and grasp planner have been tested on over 370 grasps executed on 42 IKEA objects and on the YCB object dataset, achieving grasping success rates of 80% and 87%, on IKEA and YCB, respectively.
Optimal Control for Articulated Soft Robots
Jun 02, 2023



Soft robots can execute tasks with safer interactions. However, control techniques that can effectively exploit the systems' capabilities are still missing. Differential dynamic programming (DDP) has emerged as a promising tool for achieving highly dynamic tasks. But most of the literature deals with applying DDP to articulated soft robots by using numerical differentiation, in addition to using pure feed-forward control to perform explosive tasks. Further, underactuated compliant robots are known to be difficult to control and the use of DDP-based algorithms to control them is not yet addressed. We propose an efficient DDP-based algorithm for trajectory optimization of articulated soft robots that can optimize the state trajectory, input torques, and stiffness profile. We provide an efficient method to compute the forward dynamics and the analytical derivatives of series elastic actuators (SEA)/variable stiffness actuators (VSA) and underactuated compliant robots. We present a state-feedback controller that uses locally optimal feedback policies obtained from DDP. We show through simulations and experiments that the use of feedback is crucial in improving the performance and stabilization properties of various tasks. We also show that the proposed method can be used to plan and control underactuated compliant robots, with varying degrees of underactuation effectively.
Robust Planning and Control for Dynamic Quadrupedal Locomotion with Adaptive Feet
Oct 23, 2020

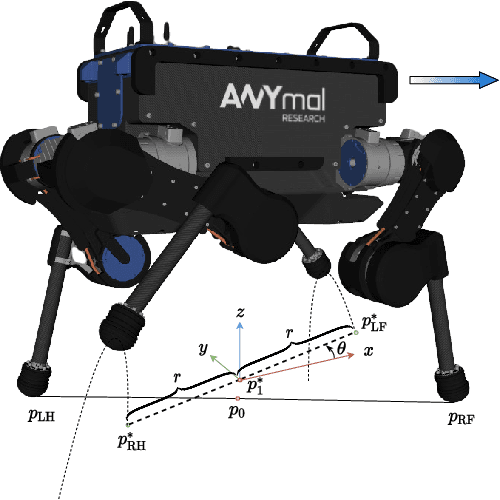
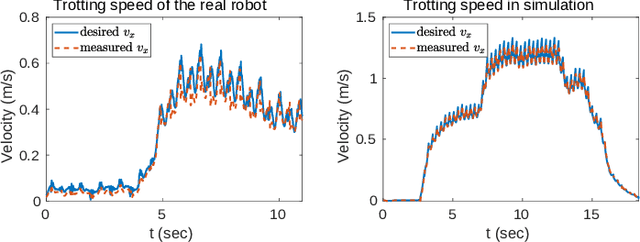
In this paper, we aim to improve the robustness of dynamic quadrupedal locomotion through three aspects: 1) fast model predictive foothold planning, 2) LQR control for robust motion tracking and 3) adaptive feet for terrain adaptation. In our proposed planning and control framework, foothold plans are updated at 400 Hz considering the current robot state and an LQR controller generates optimal feedback gains for motion tracking. The LQR optimal gain matrix with non-zero off-diagonal elements leverages the coupling of dynamics to compensate for system underactuation, such as a quadruped robot with passive ankles. The specially designed foot with adaptive sole aims at improving the traversability of rough terrains with rocks, loose gravel and rubble by enlarging the contact surfaces with ground. Experiments on the quadruped ANYmal demonstrate the effectiveness of the proposed method for robust dynamic locomotion given external disturbances and environmental uncertainties.