 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Planning and Control for Dynamic Quadrupedal Locomotion with Adaptive Feet
Oct 23, 2020

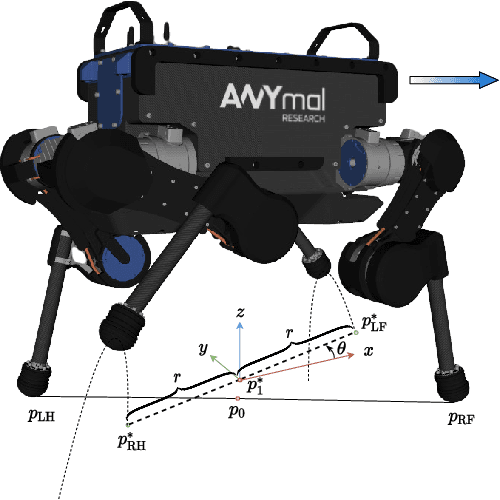
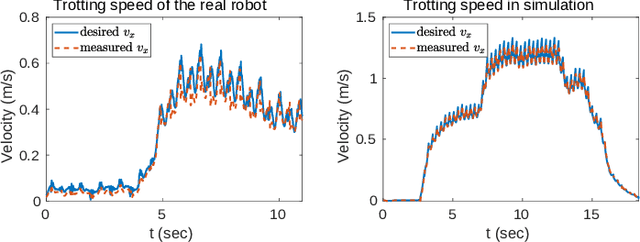
In this paper, we aim to improve the robustness of dynamic quadrupedal locomotion through three aspects: 1) fast model predictive foothold planning, 2) LQR control for robust motion tracking and 3) adaptive feet for terrain adaptation. In our proposed planning and control framework, foothold plans are updated at 400 Hz considering the current robot state and an LQR controller generates optimal feedback gains for motion tracking. The LQR optimal gain matrix with non-zero off-diagonal elements leverages the coupling of dynamics to compensate for system underactuation, such as a quadruped robot with passive ankles. The specially designed foot with adaptive sole aims at improving the traversability of rough terrains with rocks, loose gravel and rubble by enlarging the contact surfaces with ground. Experiments on the quadruped ANYmal demonstrate the effectiveness of the proposed method for robust dynamic locomotion given external disturbances and environmental uncertainties.
Online Dynamic Trajectory Optimization and Control for a Quadruped Robot
Sep 02, 2020
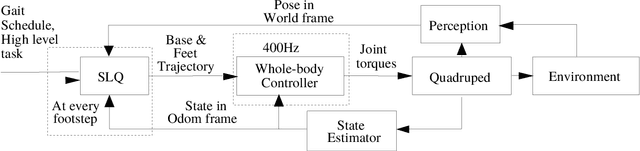
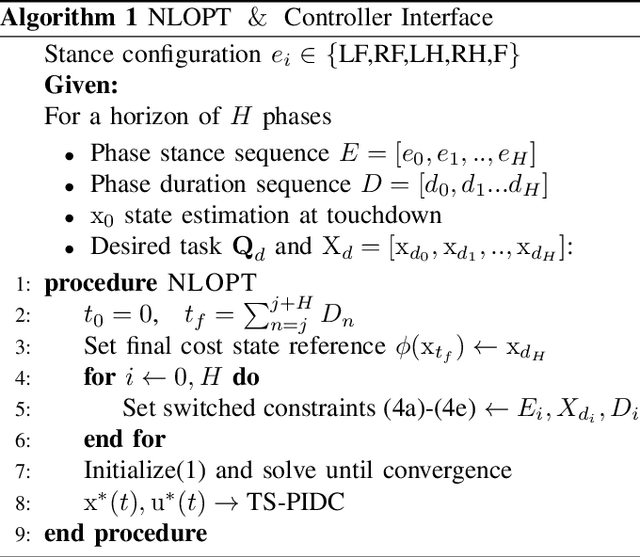

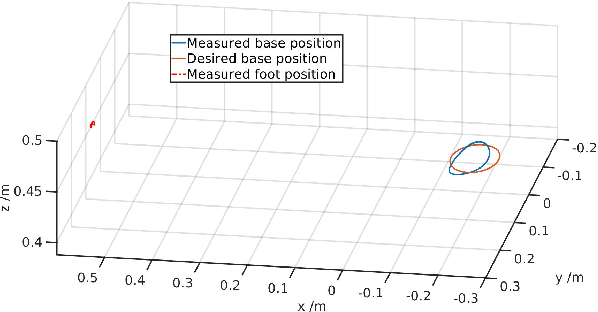
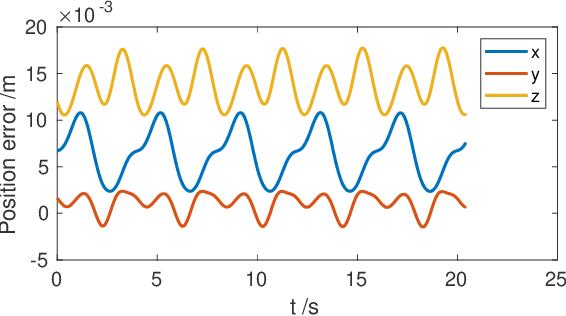
Legged robot locomotion requires the planning of stable reference trajectories, especially while traversing uneven terrain. The proposed trajectory optimization framework is capable of generating dynamically stable base and footstep trajectories for multiple steps. The locomotion task can be defined with contact locations, base motion or both, making the algorithm suitable for multiple scenarios (e.g., presence of moving obstacles). The planner uses a simplified momentum-based task space model for the robot dynamics, allowing computation times that are fast enough for online replanning.This fast planning capabilitiy also enables the quadruped to accommodate for drift and environmental changes. The algorithm is tested on simulation and a real robot across multiple scenarios, which includes uneven terrain, stairs and moving obstacles. The results show that the planner is capable of generating stable trajectories in the real robot even when a box of 15 cm height is placed in front of its path at the last moment.
Variable Autonomy of Whole-body Control for Inspection and Intervention in Industrial Environments using Legged Robots
Apr 06, 2020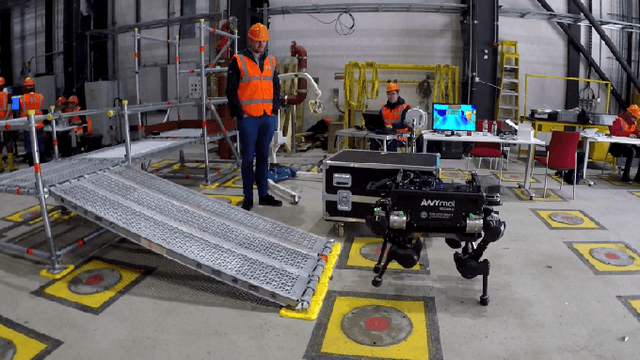
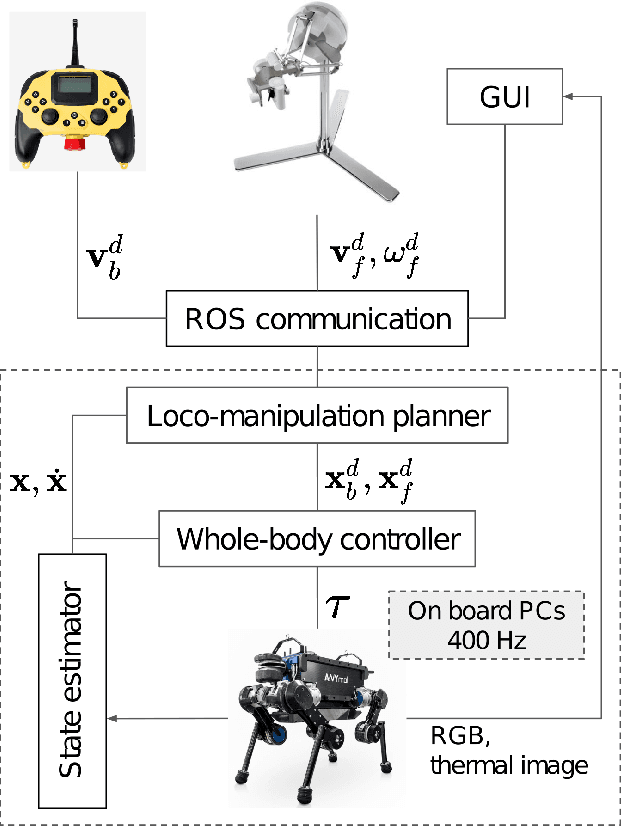
The deployment of robots in industrial and civil scenarios is a viable solution to protect operators from danger and hazards. Shared autonomy is paramount to enable remote control of complex systems such as legged robots, allowing the operator to focus on the essential tasks instead of overly detailed execution. To realize this, we proposed a comprehensive control framework for inspection and intervention using a legged robot and validated the integration of multiple loco-manipulation algorithms optimised for improving the remote operation. The proposed control offers 3 operation modes: fully automated, semi-autonomous, and the haptic interface receiving onsite physical interaction for assisting teleoperation. Our contribution is the design of a QP-based semi-analytical whole-body control, which is the key to the various task completion subject to internal and external constraints. We demonstrated the versatility of the whole-body control in terms of decoupling tasks, singularity toleration and constraint satisfaction. We deployed our solution in field trials and evaluated in an emergency setting by an E-stop while the robot was clearing road barrier and traversing difficult terrains.