 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariable Autonomy of Whole-body Control for Inspection and Intervention in Industrial Environments using Legged Robots
Paper and Code
Apr 06, 2020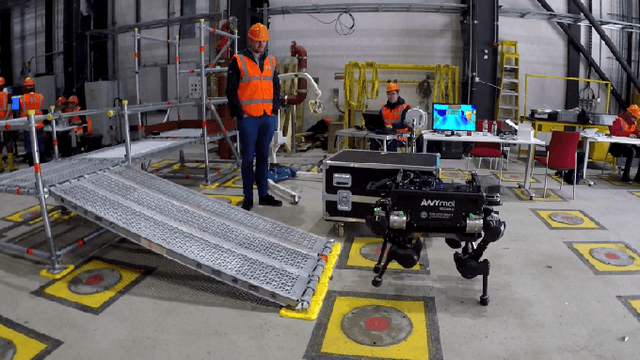
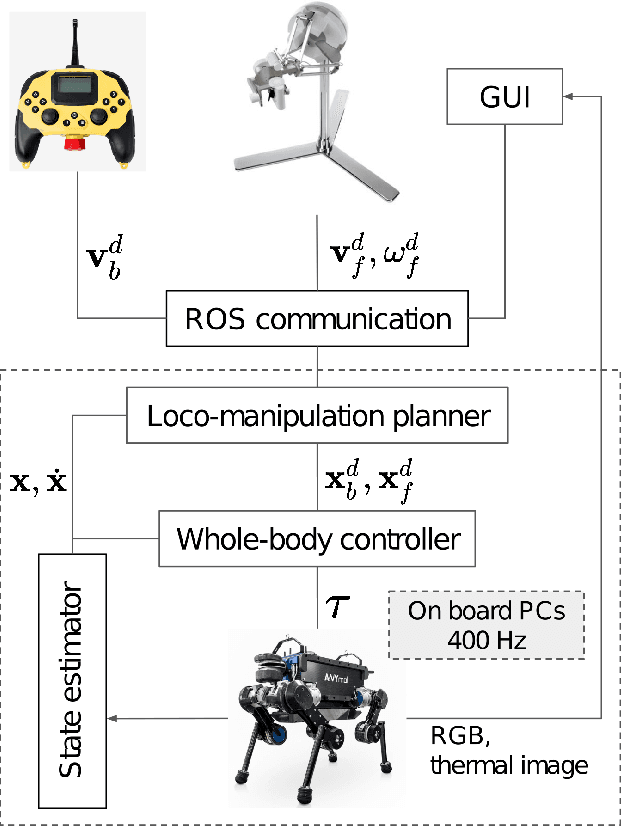
The deployment of robots in industrial and civil scenarios is a viable solution to protect operators from danger and hazards. Shared autonomy is paramount to enable remote control of complex systems such as legged robots, allowing the operator to focus on the essential tasks instead of overly detailed execution. To realize this, we proposed a comprehensive control framework for inspection and intervention using a legged robot and validated the integration of multiple loco-manipulation algorithms optimised for improving the remote operation. The proposed control offers 3 operation modes: fully automated, semi-autonomous, and the haptic interface receiving onsite physical interaction for assisting teleoperation. Our contribution is the design of a QP-based semi-analytical whole-body control, which is the key to the various task completion subject to internal and external constraints. We demonstrated the versatility of the whole-body control in terms of decoupling tasks, singularity toleration and constraint satisfaction. We deployed our solution in field trials and evaluated in an emergency setting by an E-stop while the robot was clearing road barrier and traversing difficult terrains.