 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAsk1: Development and Reinforcement Learning-Based Control of a Custom Quadruped Robot
Dec 11, 2024



In this work, we present the design, development, and experimental validation of a custom-built quadruped robot, Ask1. The Ask1 robot shares similar morphology with the Unitree Go1, but features custom hardware components and a different control architecture. We transfer and extend previous reinforcement learning (RL)-based control methods to the Ask1 robot, demonstrating the applicability of our approach in real-world scenarios. By eliminating the need for Adversarial Motion Priors (AMP) and reference trajectories, we introduce a novel reward function to guide the robot's motion style. We demonstrate the generalization capability of the proposed RL algorithm by training it on both the Go1 and Ask1 robots. Simulation and real-world experiments validate the effectiveness of this method, showing that Ask1, like the Go1, is capable of navigating various rugged terrains.
Agile Maneuvers in Legged Robots: a Predictive Control Approach
Mar 14, 2022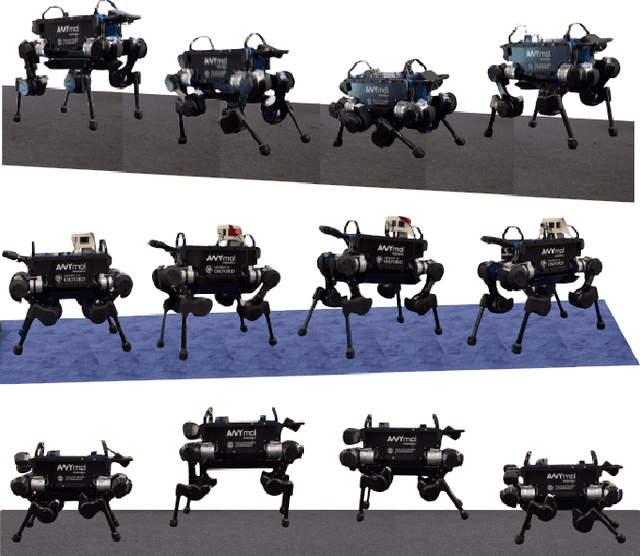
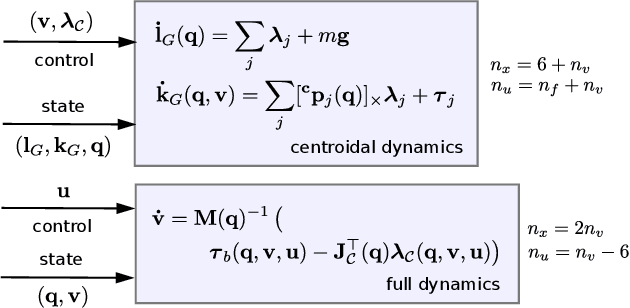
Achieving agile maneuvers through multiple contact phases has been a longstanding challenge in legged robotics. It requires to derive motion plans and local control feedback policies in real-time to handle the nonholonomy of the kinetic momenta. While a few recent predictive control approaches based on centroidal momentum have been able to generate dynamic motions, they assume unlimited actuation capabilities. This assumption is quite restrictive and does not hold for agile maneuvers on most robots. In this work, we present a contact-phase predictive and state-feedback controllers that enables legged robots to plan and perform agile locomotion skills. Our predictive controller models the contact phases using a hybrid paradigm that considers the robot's actuation limits and full dynamics. We demonstrate the benefits of our approach on agile maneuvers on ANYmal robots in realistic scenarios. To the best of our knowledge, our work is the first to show that predictive control can handle actuation limits, generate agile locomotion maneuvers and execute locally optimal feedback policies on hardware without the use of a separate whole-body controller.
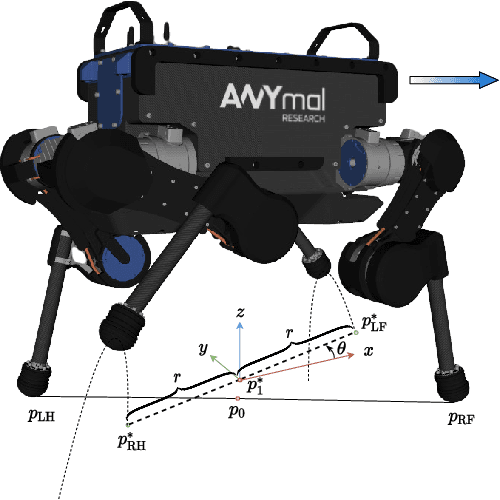
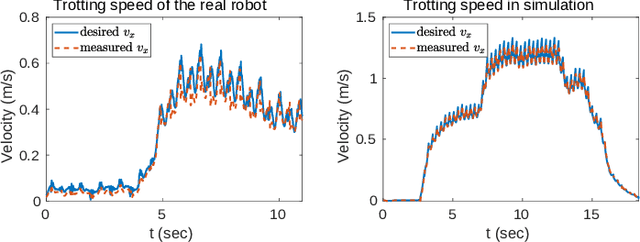
A Unified Model with Inertia Shaping for Highly Dynamic Jumps of Legged Robots
Sep 09, 2021

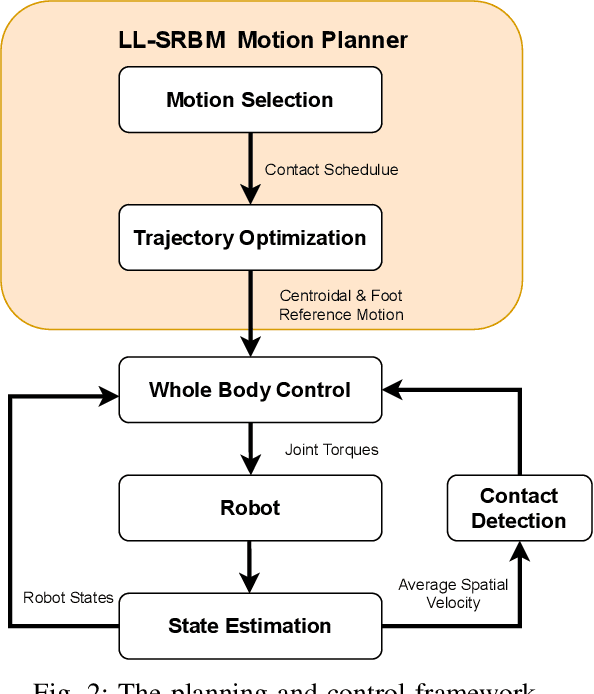

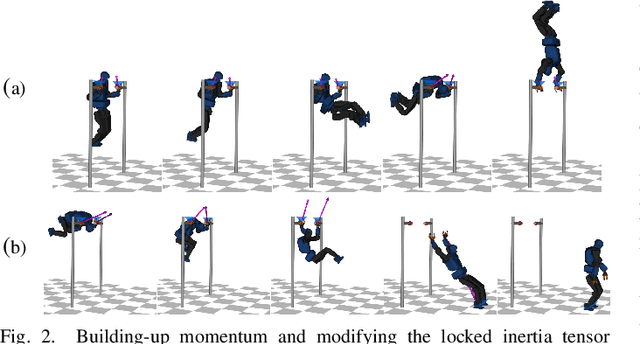
To achieve highly dynamic jumps of legged robots, it is essential to control the rotational dynamics of the robot. In this paper, we aim to improve the jumping performance by proposing a unified model for planning highly dynamic jumps that can approximately model the centroidal inertia. This model abstracts the robot as a single rigid body for the base and point masses for the legs. The model is called the Lump Leg Single Rigid Body Model (LL-SRBM) and can be used to plan motions for both bipedal and quadrupedal robots. By taking the effects of leg dynamics into account, LL-SRBM provides a computationally efficient way for the motion planner to change the centroidal inertia of the robot with various leg configurations. Concurrently, we propose a novel contact detection method by using the norm of the average spatial velocity. After the contact is detected, the controller is switched to force control to achieve a soft landing. Twisting jump and forward jump experiments on the bipedal robot SLIDER and quadrupedal robot ANYmal demonstrate the improved jump performance by actively changing the centroidal inertia. These experiments also show the generalization and the robustness of the integrated planning and control framework.
Robust Planning and Control for Dynamic Quadrupedal Locomotion with Adaptive Feet
Oct 23, 2020

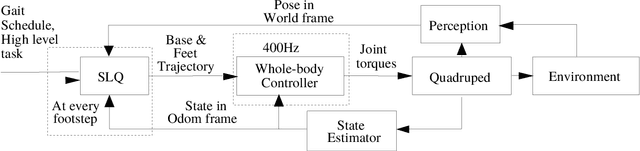
In this paper, we aim to improve the robustness of dynamic quadrupedal locomotion through three aspects: 1) fast model predictive foothold planning, 2) LQR control for robust motion tracking and 3) adaptive feet for terrain adaptation. In our proposed planning and control framework, foothold plans are updated at 400 Hz considering the current robot state and an LQR controller generates optimal feedback gains for motion tracking. The LQR optimal gain matrix with non-zero off-diagonal elements leverages the coupling of dynamics to compensate for system underactuation, such as a quadruped robot with passive ankles. The specially designed foot with adaptive sole aims at improving the traversability of rough terrains with rocks, loose gravel and rubble by enlarging the contact surfaces with ground. Experiments on the quadruped ANYmal demonstrate the effectiveness of the proposed method for robust dynamic locomotion given external disturbances and environmental uncertainties.
Online Dynamic Trajectory Optimization and Control for a Quadruped Robot
Sep 02, 2020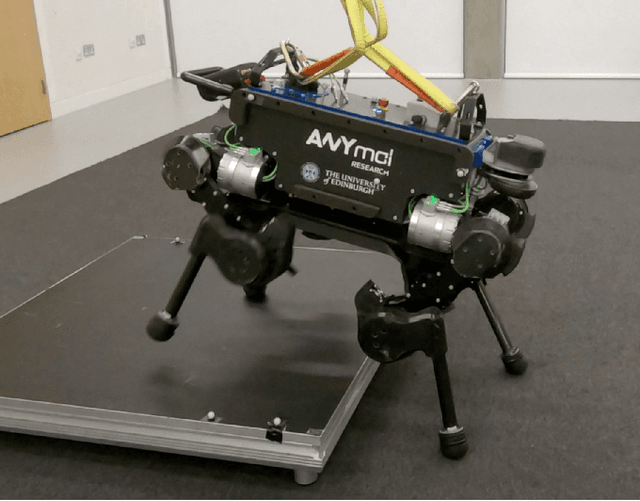
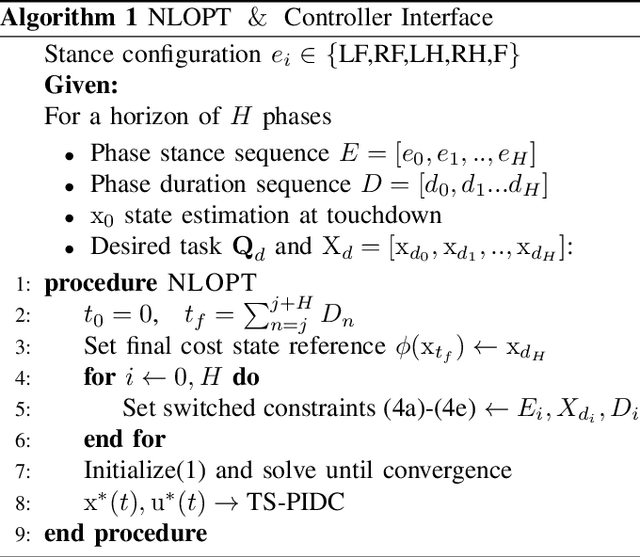

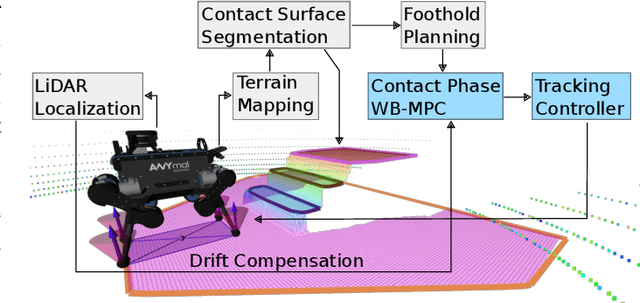
Legged robot locomotion requires the planning of stable reference trajectories, especially while traversing uneven terrain. The proposed trajectory optimization framework is capable of generating dynamically stable base and footstep trajectories for multiple steps. The locomotion task can be defined with contact locations, base motion or both, making the algorithm suitable for multiple scenarios (e.g., presence of moving obstacles). The planner uses a simplified momentum-based task space model for the robot dynamics, allowing computation times that are fast enough for online replanning.This fast planning capabilitiy also enables the quadruped to accommodate for drift and environmental changes. The algorithm is tested on simulation and a real robot across multiple scenarios, which includes uneven terrain, stairs and moving obstacles. The results show that the planner is capable of generating stable trajectories in the real robot even when a box of 15 cm height is placed in front of its path at the last moment.
Variable Autonomy of Whole-body Control for Inspection and Intervention in Industrial Environments using Legged Robots
Apr 06, 2020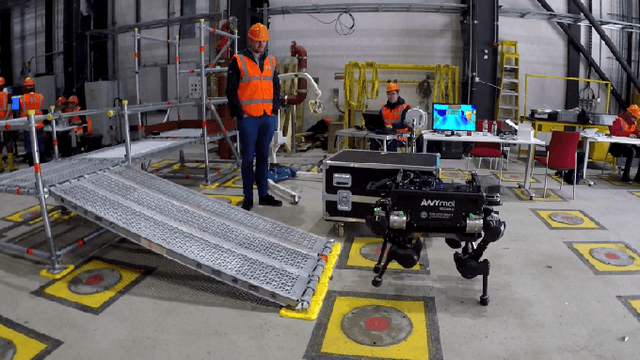
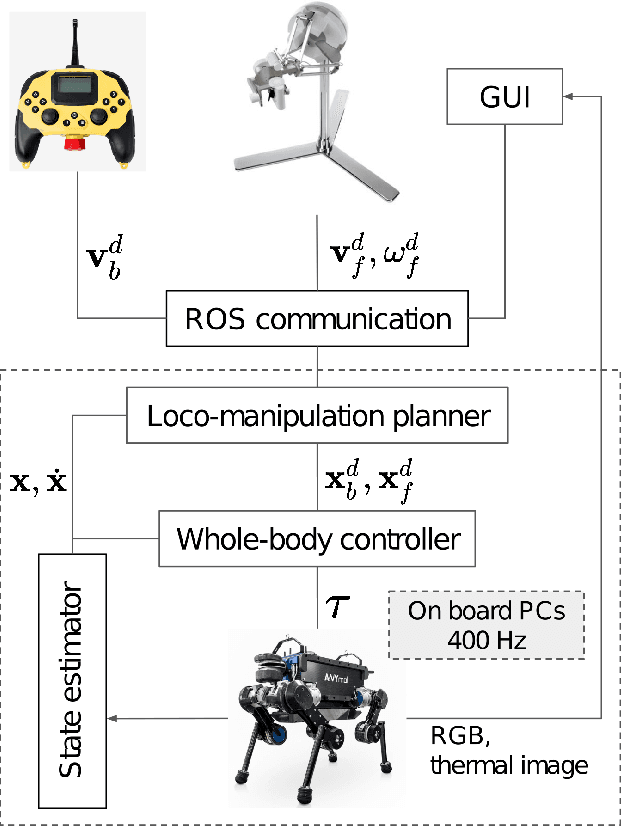
The deployment of robots in industrial and civil scenarios is a viable solution to protect operators from danger and hazards. Shared autonomy is paramount to enable remote control of complex systems such as legged robots, allowing the operator to focus on the essential tasks instead of overly detailed execution. To realize this, we proposed a comprehensive control framework for inspection and intervention using a legged robot and validated the integration of multiple loco-manipulation algorithms optimised for improving the remote operation. The proposed control offers 3 operation modes: fully automated, semi-autonomous, and the haptic interface receiving onsite physical interaction for assisting teleoperation. Our contribution is the design of a QP-based semi-analytical whole-body control, which is the key to the various task completion subject to internal and external constraints. We demonstrated the versatility of the whole-body control in terms of decoupling tasks, singularity toleration and constraint satisfaction. We deployed our solution in field trials and evaluated in an emergency setting by an E-stop while the robot was clearing road barrier and traversing difficult terrains.
Optimisation of Body-ground Contact for Augmenting Whole-Body Loco-manipulation of Quadruped Robots
Feb 24, 2020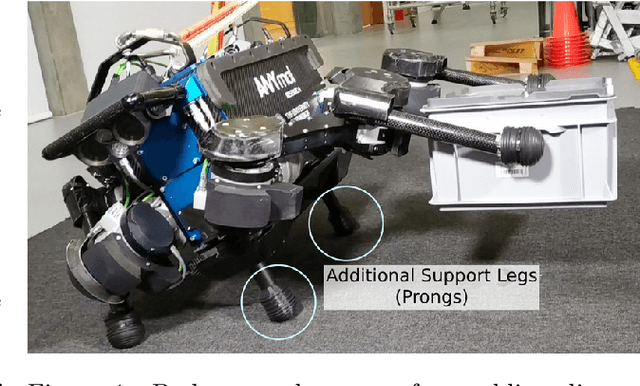


Legged robots have great potential to perform loco-manipulation tasks, yet it is challenging to keep the robot balanced while it interacts with the environment. In this paper we study the use of additional contact points for maximising the robustness of loco-manipulation motions. Specifically, body-ground contact is studied for enhancing robustness and manipulation capabilities of quadrupedal robots. We propose to equip the robot with prongs: small legs rigidly attached to the body which ensure body-ground contact occurs in controllable point-contacts. The effect of these prongs on robustness is quantified by computing the Smallest Unrejectable Force (SUF), a measure of robustness related to Feasible Wrench Polytopes. We apply the SUF to assess the robustness of the system, and propose an effective approximation of the SUF that can be computed at near-real-time speed. We design a hierarchical quadratic programming based whole-body controller that controls stable interaction when the prongs are in contact with the ground. This novel concept of using prongs and the resulting control framework are all implemented on hardware to validate the effectiveness of the increased robustness and newly enabled loco-manipulation tasks, such as obstacle clearance and manipulation of a large object.
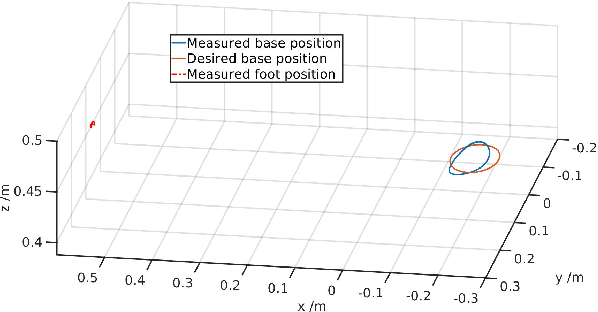
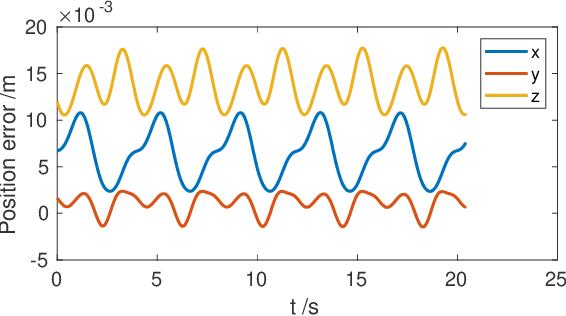
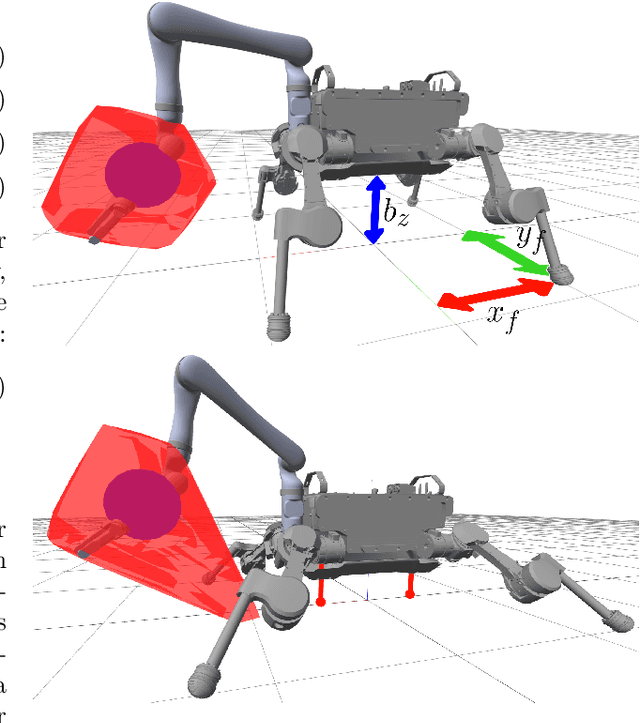
Bounded haptic teleoperation of a quadruped robot's foot posture for sensing and manipulation
Dec 16, 2019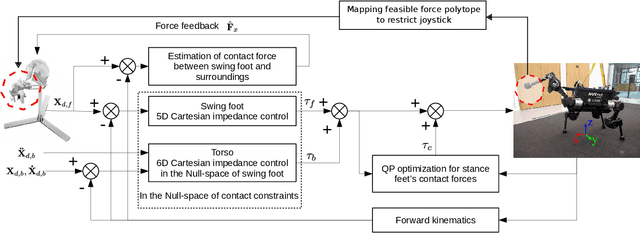
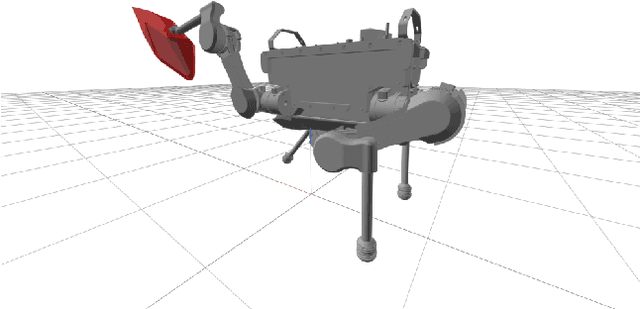
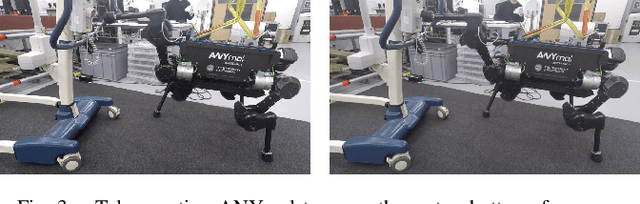

This paper presents a control framework to teleoperate a quadruped robot's foot for operator-guided haptic exploration of the environment. Since one leg of a quadruped robot typically only has 3 actuated degrees of freedom (DoFs), the torso is employed to assist foot posture control via a hierarchical whole-body controller. The foot and torso postures are controlled by two analytical Cartesian impedance controllers cascaded by a null space projector. The contact forces acting on supporting feet are optimized by quadratic programming (QP). The foot's Cartesian impedance controller may also estimate contact forces from trajectory tracking errors, and relay the force-feedback to the operator. A 7D haptic joystick, Sigma.7, transmits motion commands to the quadruped robot ANYmal, and renders the force feedback. Furthermore, the joystick's motion is bounded by mapping the foot's feasible force polytope constrained by the friction cones and torque limits in order to prevent the operator from driving the robot to slipping or falling over. Experimental results demonstrate the efficiency of the proposed framework.