 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Multi-Contact Receding Horizon Planning via Value Function Approximation
Jun 12, 2023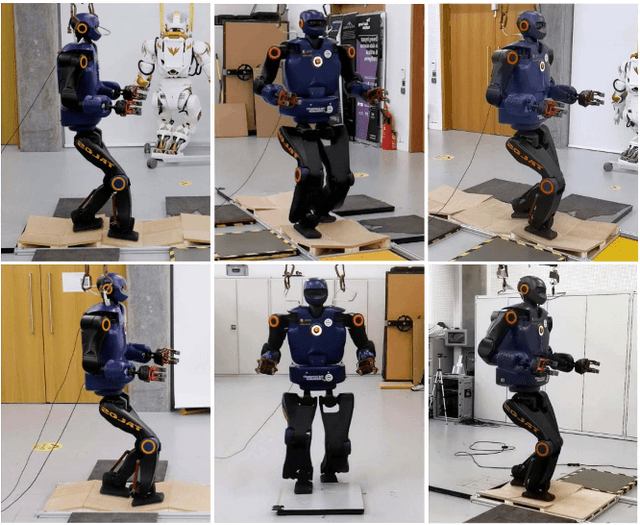
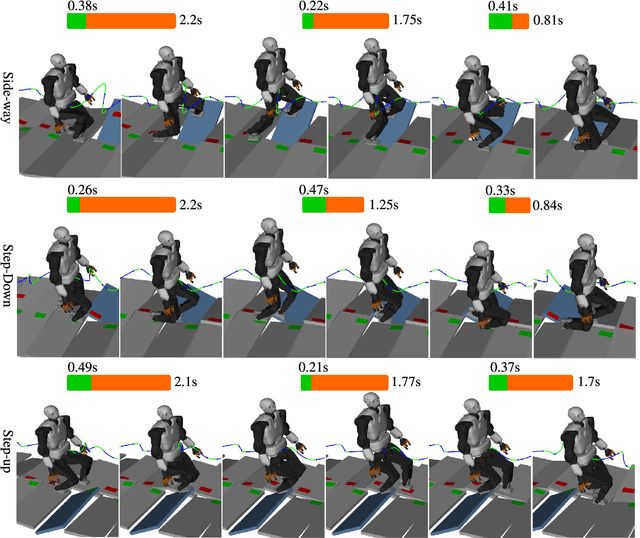
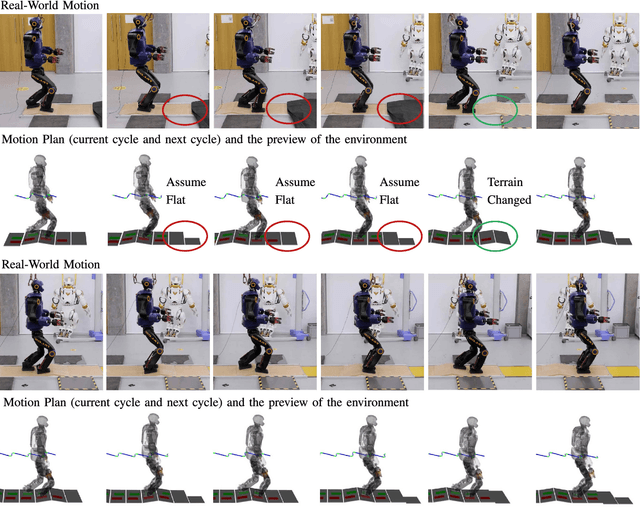
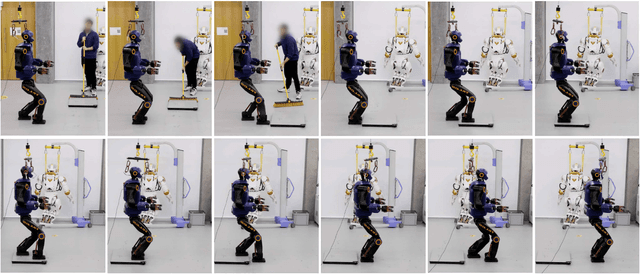
Planning multi-contact motions in a receding horizon fashion requires a value function to guide the planning with respect to the future, e.g., building momentum to traverse large obstacles. Traditionally, the value function is approximated by computing trajectories in a prediction horizon (never executed) that foresees the future beyond the execution horizon. However, given the non-convex dynamics of multi-contact motions, this approach is computationally expensive. To enable online Receding Horizon Planning (RHP) of multi-contact motions, we find efficient approximations of the value function. Specifically, we propose a trajectory-based and a learning-based approach. In the former, namely RHP with Multiple Levels of Model Fidelity, we approximate the value function by computing the prediction horizon with a convex relaxed model. In the latter, namely Locally-Guided RHP, we learn an oracle to predict local objectives for locomotion tasks, and we use these local objectives to construct local value functions for guiding a short-horizon RHP. We evaluate both approaches in simulation by planning centroidal trajectories of a humanoid robot walking on moderate slopes, and on large slopes where the robot cannot maintain static balance. Our results show that locally-guided RHP achieves the best computation efficiency (95\%-98.6\% cycles converge online). This computation advantage enables us to demonstrate online receding horizon planning of our real-world humanoid robot Talos walking in dynamic environments that change on-the-fly.
Topology-Based MPC for Automatic Footstep Placement and Contact Surface Selection
Mar 24, 2023



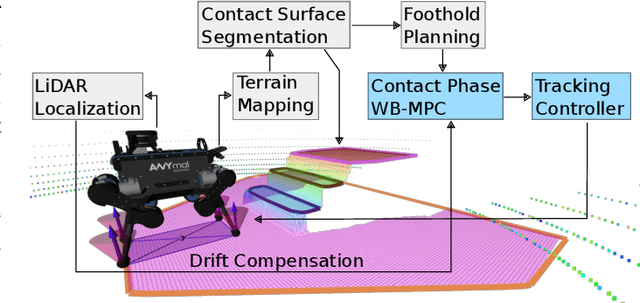
State-of-the-art approaches to footstep planning assume reduced-order dynamics when solving the combinatorial problem of selecting contact surfaces in real time. However, in exchange for computational efficiency, these approaches ignore joint torque limits and limb dynamics. In this work, we address these limitations by presenting a topology-based approach that enables~\gls{mpc} to simultaneously plan full-body motions, torque commands, footstep placements, and contact surfaces in real time. To determine if a robot's foot is inside a contact surface, we borrow the winding number concept from topology. We then use this winding number and potential field to create a contact-surface penalty function. By using this penalty function,~\gls{mpc} can select a contact surface from all candidate surfaces in the vicinity and determine footstep placements within it. We demonstrate the benefits of our approach by showing the impact of considering full-body dynamics, which includes joint torque limits and limb dynamics, on the selection of footstep placements and contact surfaces. Furthermore, we validate the feasibility of deploying our topology-based approach in an~\gls{mpc} scheme and explore its potential capabilities through a series of experimental and simulation trials.
* 7 pages, 6 figures
Agile Maneuvers in Legged Robots: a Predictive Control Approach
Mar 14, 2022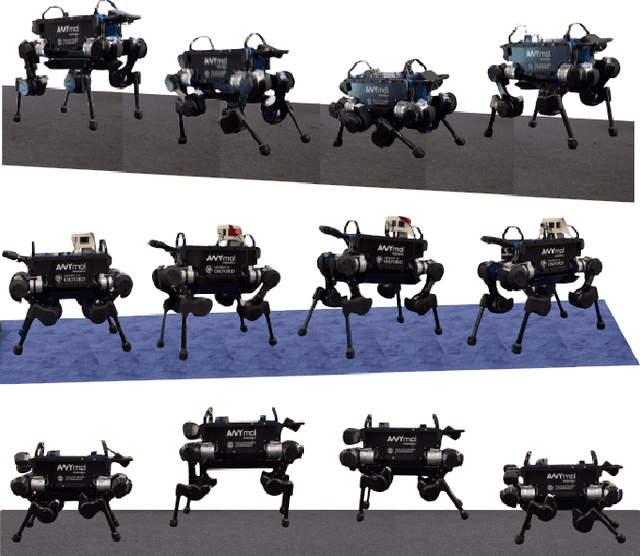
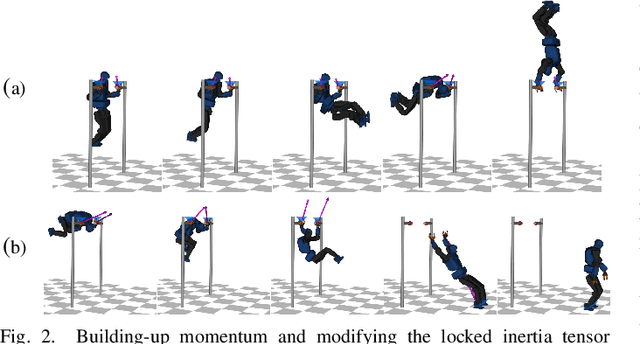
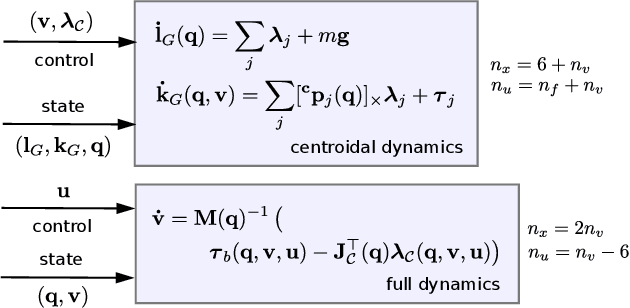
Achieving agile maneuvers through multiple contact phases has been a longstanding challenge in legged robotics. It requires to derive motion plans and local control feedback policies in real-time to handle the nonholonomy of the kinetic momenta. While a few recent predictive control approaches based on centroidal momentum have been able to generate dynamic motions, they assume unlimited actuation capabilities. This assumption is quite restrictive and does not hold for agile maneuvers on most robots. In this work, we present a contact-phase predictive and state-feedback controllers that enables legged robots to plan and perform agile locomotion skills. Our predictive controller models the contact phases using a hybrid paradigm that considers the robot's actuation limits and full dynamics. We demonstrate the benefits of our approach on agile maneuvers on ANYmal robots in realistic scenarios. To the best of our knowledge, our work is the first to show that predictive control can handle actuation limits, generate agile locomotion maneuvers and execute locally optimal feedback policies on hardware without the use of a separate whole-body controller.