 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient Representation of Whole-body Model Predictive Control for Online Compliant Dual-arm Mobile Manipulation
Oct 30, 2024



Dual-arm mobile manipulators can transport and manipulate large-size objects with simple end-effectors. To interact with dynamic environments with strict safety and compliance requirements, achieving whole-body motion planning online while meeting various hard constraints for such highly redundant mobile manipulators poses a significant challenge. We tackle this challenge by presenting an efficient representation of whole-body motion trajectories within our bilevel model-based predictive control (MPC) framework. We utilize B\'ezier-curve parameterization to represent the optimized collision-free trajectories of two collaborating end-effectors in the first MPC, facilitating fast long-horizon object-oriented motion planning in SE(3) while considering approximated feasibility constraints. This approach is further applied to parameterize whole-body trajectories in the second MPC for whole-body motion generation with predictive admittance control in a relatively short horizon while satisfying whole-body hard constraints. This representation enables two MPCs with continuous properties, thereby avoiding inaccurate model-state transition and dense decision-variable settings in existing MPCs using the discretization method. It strengthens the online execution of the bilevel MPC framework in high-dimensional space and facilitates the generation of consistent commands for our hybrid position/velocity-controlled robot. The simulation comparisons and real-world experiments demonstrate the efficiency and robustness of this approach in various scenarios for static and dynamic obstacle avoidance, and compliant interaction control with the manipulated object and external disturbances.
Enabling robots to follow abstract instructions and complete complex dynamic tasks
Jun 17, 2024



Completing complex tasks in unpredictable settings like home kitchens challenges robotic systems. These challenges include interpreting high-level human commands, such as "make me a hot beverage" and performing actions like pouring a precise amount of water into a moving mug. To address these challenges, we present a novel framework that combines Large Language Models (LLMs), a curated Knowledge Base, and Integrated Force and Visual Feedback (IFVF). Our approach interprets abstract instructions, performs long-horizon tasks, and handles various uncertainties. It utilises GPT-4 to analyse the user's query and surroundings, then generates code that accesses a curated database of functions during execution. It translates abstract instructions into actionable steps. Each step involves generating custom code by employing retrieval-augmented generalisation to pull IFVF-relevant examples from the Knowledge Base. IFVF allows the robot to respond to noise and disturbances during execution. We use coffee making and plate decoration to demonstrate our approach, including components ranging from pouring to drawer opening, each benefiting from distinct feedback types and methods. This novel advancement marks significant progress toward a scalable, efficient robotic framework for completing complex tasks in uncertain environments. Our findings are illustrated in an accompanying video and supported by an open-source GitHub repository (released upon paper acceptance).
Online Multi-Contact Receding Horizon Planning via Value Function Approximation
Jun 12, 2023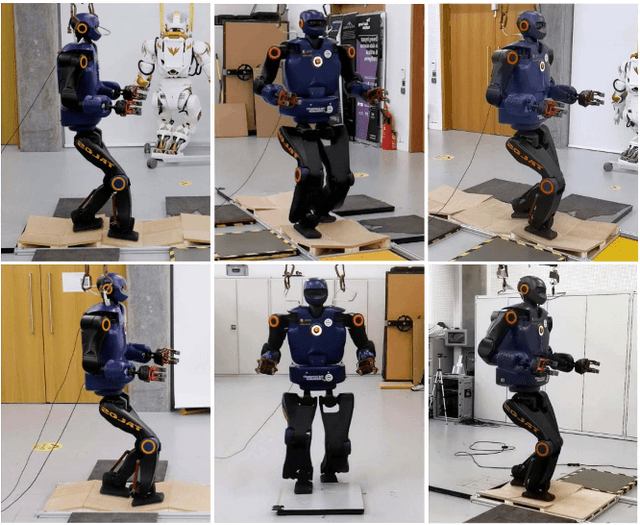
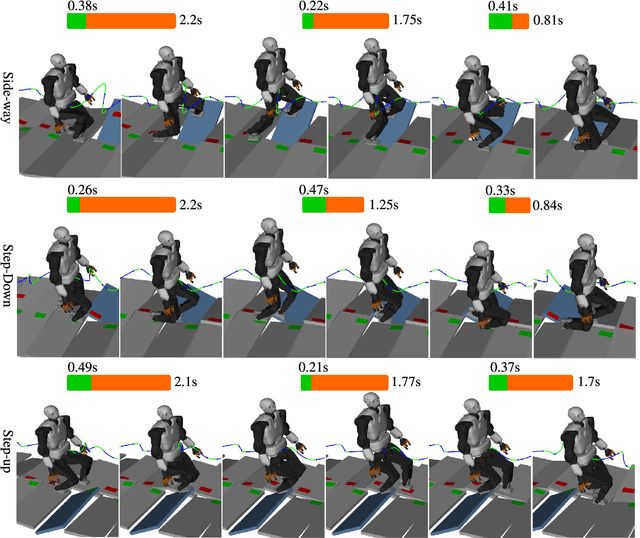
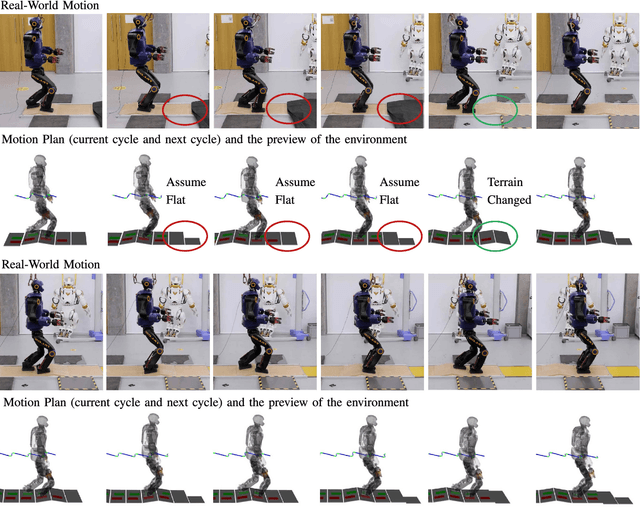
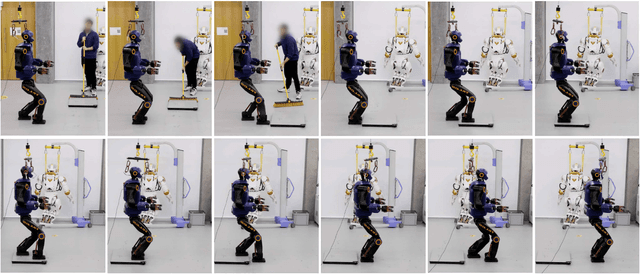
Planning multi-contact motions in a receding horizon fashion requires a value function to guide the planning with respect to the future, e.g., building momentum to traverse large obstacles. Traditionally, the value function is approximated by computing trajectories in a prediction horizon (never executed) that foresees the future beyond the execution horizon. However, given the non-convex dynamics of multi-contact motions, this approach is computationally expensive. To enable online Receding Horizon Planning (RHP) of multi-contact motions, we find efficient approximations of the value function. Specifically, we propose a trajectory-based and a learning-based approach. In the former, namely RHP with Multiple Levels of Model Fidelity, we approximate the value function by computing the prediction horizon with a convex relaxed model. In the latter, namely Locally-Guided RHP, we learn an oracle to predict local objectives for locomotion tasks, and we use these local objectives to construct local value functions for guiding a short-horizon RHP. We evaluate both approaches in simulation by planning centroidal trajectories of a humanoid robot walking on moderate slopes, and on large slopes where the robot cannot maintain static balance. Our results show that locally-guided RHP achieves the best computation efficiency (95\%-98.6\% cycles converge online). This computation advantage enables us to demonstrate online receding horizon planning of our real-world humanoid robot Talos walking in dynamic environments that change on-the-fly.