 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient Representation of Whole-body Model Predictive Control for Online Compliant Dual-arm Mobile Manipulation
Oct 30, 2024



Dual-arm mobile manipulators can transport and manipulate large-size objects with simple end-effectors. To interact with dynamic environments with strict safety and compliance requirements, achieving whole-body motion planning online while meeting various hard constraints for such highly redundant mobile manipulators poses a significant challenge. We tackle this challenge by presenting an efficient representation of whole-body motion trajectories within our bilevel model-based predictive control (MPC) framework. We utilize B\'ezier-curve parameterization to represent the optimized collision-free trajectories of two collaborating end-effectors in the first MPC, facilitating fast long-horizon object-oriented motion planning in SE(3) while considering approximated feasibility constraints. This approach is further applied to parameterize whole-body trajectories in the second MPC for whole-body motion generation with predictive admittance control in a relatively short horizon while satisfying whole-body hard constraints. This representation enables two MPCs with continuous properties, thereby avoiding inaccurate model-state transition and dense decision-variable settings in existing MPCs using the discretization method. It strengthens the online execution of the bilevel MPC framework in high-dimensional space and facilitates the generation of consistent commands for our hybrid position/velocity-controlled robot. The simulation comparisons and real-world experiments demonstrate the efficiency and robustness of this approach in various scenarios for static and dynamic obstacle avoidance, and compliant interaction control with the manipulated object and external disturbances.
Enabling robots to follow abstract instructions and complete complex dynamic tasks
Jun 17, 2024



Completing complex tasks in unpredictable settings like home kitchens challenges robotic systems. These challenges include interpreting high-level human commands, such as "make me a hot beverage" and performing actions like pouring a precise amount of water into a moving mug. To address these challenges, we present a novel framework that combines Large Language Models (LLMs), a curated Knowledge Base, and Integrated Force and Visual Feedback (IFVF). Our approach interprets abstract instructions, performs long-horizon tasks, and handles various uncertainties. It utilises GPT-4 to analyse the user's query and surroundings, then generates code that accesses a curated database of functions during execution. It translates abstract instructions into actionable steps. Each step involves generating custom code by employing retrieval-augmented generalisation to pull IFVF-relevant examples from the Knowledge Base. IFVF allows the robot to respond to noise and disturbances during execution. We use coffee making and plate decoration to demonstrate our approach, including components ranging from pouring to drawer opening, each benefiting from distinct feedback types and methods. This novel advancement marks significant progress toward a scalable, efficient robotic framework for completing complex tasks in uncertain environments. Our findings are illustrated in an accompanying video and supported by an open-source GitHub repository (released upon paper acceptance).
RGB-D-Inertial SLAM in Indoor Dynamic Environments with Long-term Large Occlusion
Mar 23, 2023This work presents a novel RGB-D-inertial dynamic SLAM method that can enable accurate localisation when the majority of the camera view is occluded by multiple dynamic objects over a long period of time. Most dynamic SLAM approaches either remove dynamic objects as outliers when they account for a minor proportion of the visual input, or detect dynamic objects using semantic segmentation before camera tracking. Therefore, dynamic objects that cause large occlusions are difficult to detect without prior information. The remaining visual information from the static background is also not enough to support localisation when large occlusion lasts for a long period. To overcome these problems, our framework presents a robust visual-inertial bundle adjustment that simultaneously tracks camera, estimates cluster-wise dense segmentation of dynamic objects and maintains a static sparse map by combining dense and sparse features. The experiment results demonstrate that our method achieves promising localisation and object segmentation performance compared to other state-of-the-art methods in the scenario of long-term large occlusion.
Sparse-Dense Motion Modelling and Tracking for Manipulation without Prior Object Models
Apr 25, 2022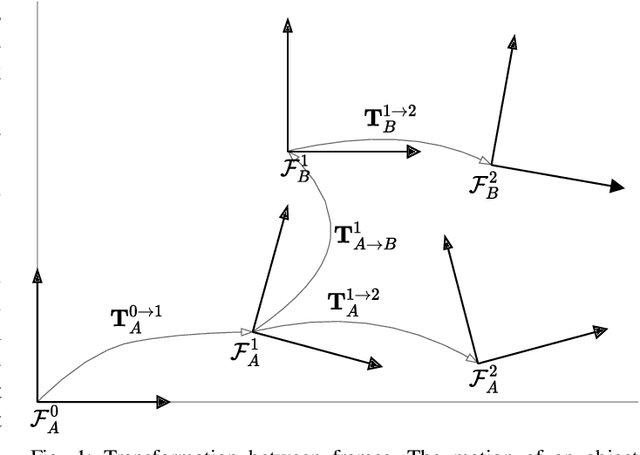
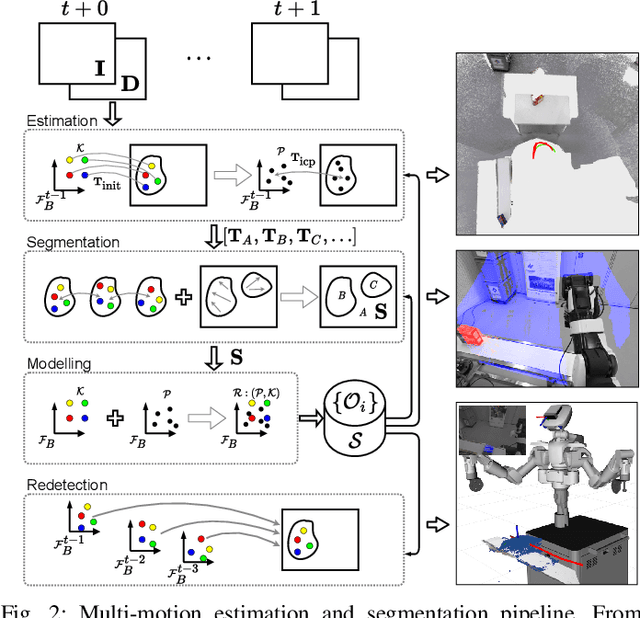
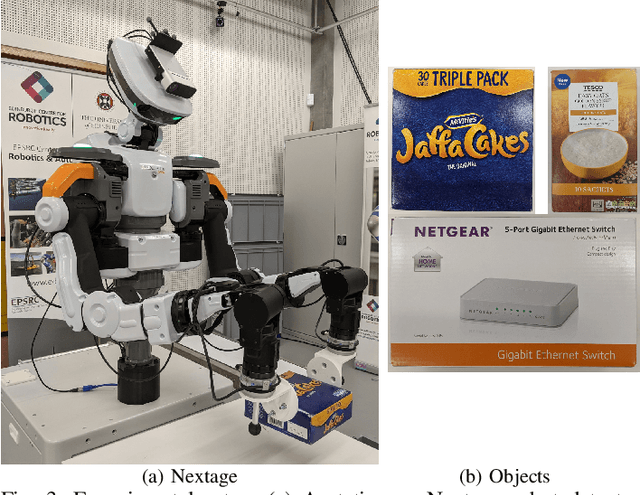
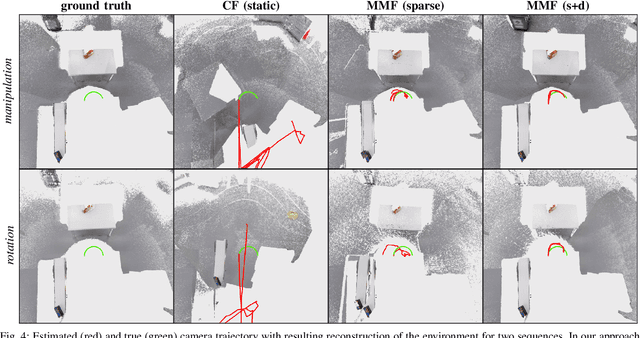
This work presents an approach for modelling and tracking previously unseen objects for robotic grasping tasks. Using the motion of objects in a scene, our approach segments rigid entities from the scene and continuously tracks them to create a dense and sparse model of the object and the environment. While the dense tracking enables interaction with these models, the sparse tracking makes this robust against fast movements and allows to redetect already modelled objects. The evaluation on a dual-arm grasping task demonstrates that our approach 1) enables a robot to detect new objects online without a prior model and to grasp these objects using only a simple parameterisable geometric representation, and 2) is much more robust compared to the state of the art methods.
RGB-D SLAM in Indoor Planar Environments with Multiple Large Dynamic Objects
Mar 06, 2022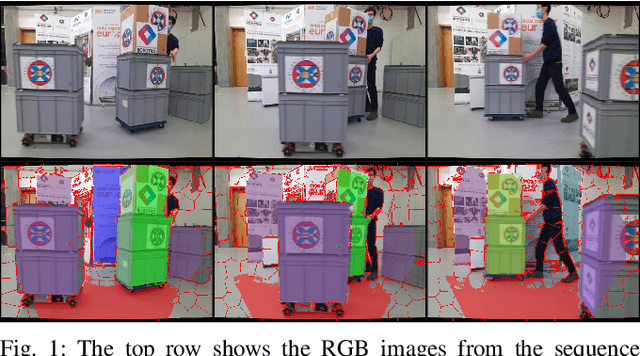
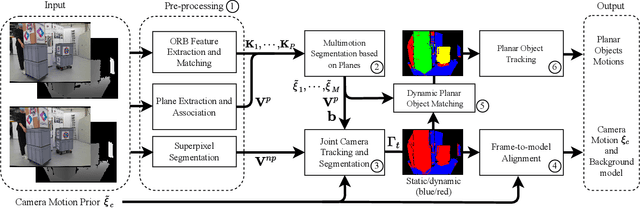
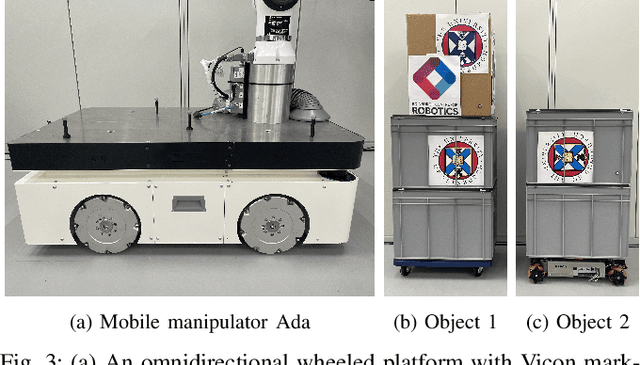
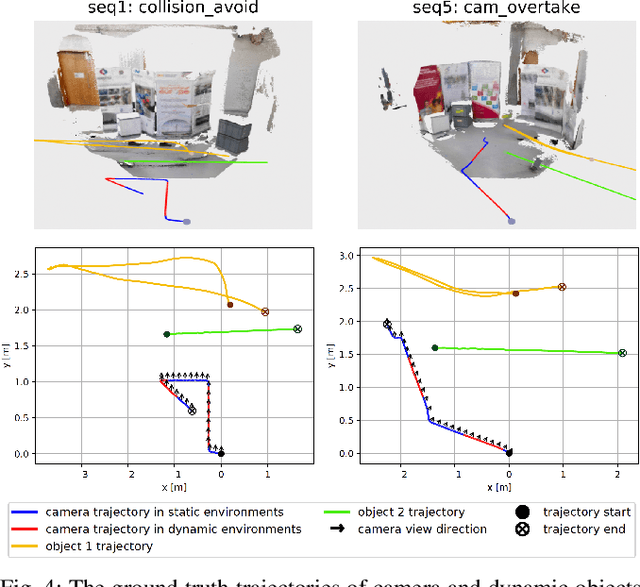
This work presents a novel dense RGB-D SLAM approach for dynamic planar environments that enables simultaneous multi-object tracking, camera localisation and background reconstruction. Previous dynamic SLAM methods either rely on semantic segmentation to directly detect dynamic objects; or assume that dynamic objects occupy a smaller proportion of the camera view than the static background and can, therefore, be removed as outliers. Our approach, however, enables dense SLAM when the camera view is largely occluded by multiple dynamic objects with the aid of camera motion prior. The dynamic planar objects are separated by their different rigid motions and tracked independently. The remaining dynamic non-planar areas are removed as outliers and not mapped into the background. The evaluation demonstrates that our approach outperforms the state-of-the-art methods in terms of localisation, mapping, dynamic segmentation and object tracking. We also demonstrate its robustness to large drift in the camera motion prior.
RigidFusion: Robot Localisation and Mapping in Environments with Large Dynamic Rigid Objects
Oct 21, 2020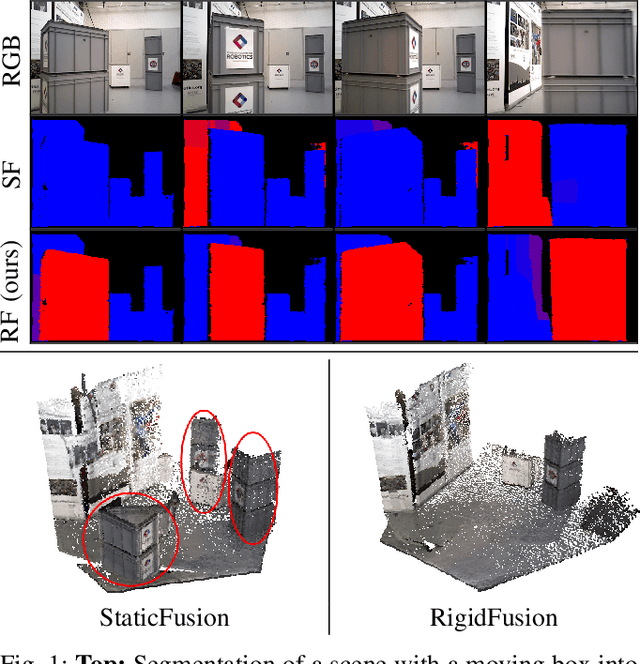

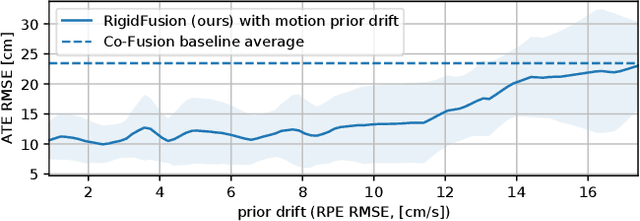
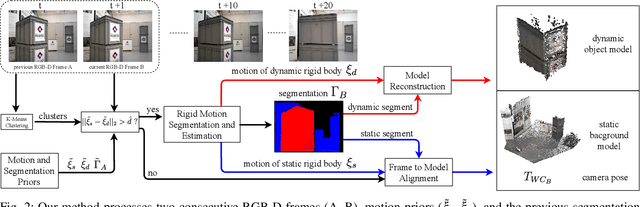
This work presents a novel approach to simultaneously track a robot with respect to multiple rigid entities, including the environment and additional dynamic objects in a scene. Previous approaches treat dynamic parts of a scene as outliers and are thus limited to small amount of dynamics, or rely on prior information for all objects in the scene to enable robust camera tracking. Here, we propose to formulate localisation and object tracking as the same underlying problem and simultaneously track multiple rigid transformations, therefore enabling simultaneous localisation and object tracking for mobile manipulators in dynamic scenes. We evaluate our approach on multiple challenging dynamic scenes with large occlusions. The evaluation demonstrates that our approach achieves better scene segmentation and camera pose tracking in highly dynamic scenes without requiring knowledge of the dynamic object's appearance.