 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRGB-D SLAM in Indoor Planar Environments with Multiple Large Dynamic Objects
Paper and Code
Mar 06, 2022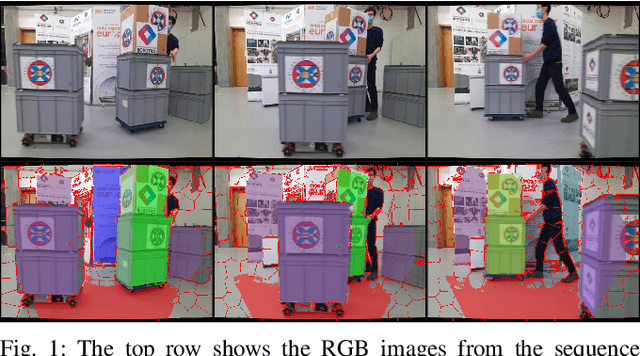
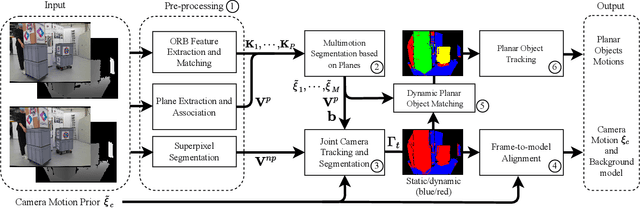
This work presents a novel dense RGB-D SLAM approach for dynamic planar environments that enables simultaneous multi-object tracking, camera localisation and background reconstruction. Previous dynamic SLAM methods either rely on semantic segmentation to directly detect dynamic objects; or assume that dynamic objects occupy a smaller proportion of the camera view than the static background and can, therefore, be removed as outliers. Our approach, however, enables dense SLAM when the camera view is largely occluded by multiple dynamic objects with the aid of camera motion prior. The dynamic planar objects are separated by their different rigid motions and tracked independently. The remaining dynamic non-planar areas are removed as outliers and not mapped into the background. The evaluation demonstrates that our approach outperforms the state-of-the-art methods in terms of localisation, mapping, dynamic segmentation and object tracking. We also demonstrate its robustness to large drift in the camera motion prior.