 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysically Consistent Online Inertial Adaptation for Humanoid Loco-manipulation
May 13, 2024



The ability to accomplish manipulation and locomotion tasks in the presence of significant time-varying external loads is a remarkable skill of humans that has yet to be replicated convincingly by humanoid robots. Such an ability will be a key requirement in the environments we envision deploying our robots: dull, dirty, and dangerous. External loads constitute a large model bias, which is typically unaccounted for. In this work, we enable our humanoid robot to engage in loco-manipulation tasks in the presence of significant model bias due to external loads. We propose an online estimation and control framework involving the combination of a physically consistent extended Kalman filter for inertial parameter estimation coupled to a whole-body controller. We showcase our results both in simulation and in hardware, where weights are mounted on Nadia's wrist links as a proxy for engaging in tasks where large external loads are applied to the robot.
Efficient, Dynamic Locomotion through Step Placement with Straight Legs and Rolling Contacts
Oct 19, 2023For humans, fast, efficient walking over flat ground represents the vast majority of locomotion that an individual experiences on a daily basis, and for an effective, real-world humanoid robot the same will likely be the case. In this work, we propose a locomotion controller for efficient walking over near-flat ground using a relatively simple, model-based controller that utilizes a novel combination of several interesting design features including an ALIP-based step adjustment strategy, stance leg length control as an alternative to center of mass height control, and rolling contact for heel-to-toe motion of the stance foot. We then present the results of this controller on our robot Nadia, both in simulation and on hardware. These results include validation of this controller's ability to perform fast, reliable forward walking at 0.75 m/s along with backwards walking, side-stepping, turning in place, and push recovery. We also present an efficiency comparison between the proposed control strategy and our baseline walking controller over three steady-state walking speeds. Lastly, we demonstrate some of the benefits of utilizing rolling contact in the stance foot, specifically the reduction of necessary positive and negative work throughout the stride.
Design, Modeling, and Evaluation of Separable Tendon-Driven Robotic Manipulator with Long, Passive, Flexible Proximal Section
Jan 01, 2023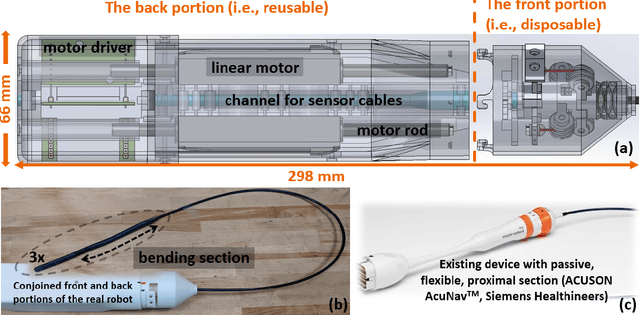

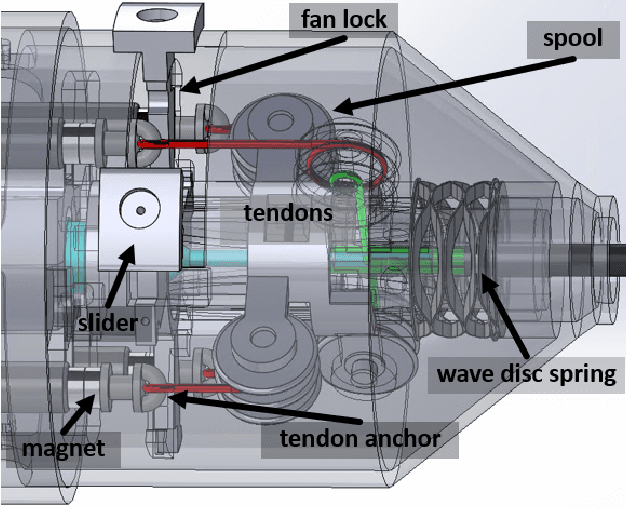

The purpose of this work was to tackle practical issues which arise when using a tendon-driven robotic manipulator with a long, passive, flexible proximal section in medical applications. A separable robot which overcomes difficulties in actuation and sterilization is introduced, in which the body containing the electronics is reusable and the remainder is disposable. A control input which resolves the redundancy in the kinematics and a physical interpretation of this redundancy are provided. The effect of a static change in the proximal section angle on bending angle error was explored under four testing conditions for a sinusoidal input. Bending angle error increased for increasing proximal section angle for all testing conditions with an average error reduction of 41.48% for retension, 4.28% for hysteresis, and 52.35% for re-tension + hysteresis compensation relative to the baseline case. Two major sources of error in tracking the bending angle were identified: time delay from hysteresis and DC offset from the proximal section angle. Examination of these error sources revealed that the simple hysteresis compensation was most effective for removing time delay and re-tension compensation for removing DC offset, which was the primary source of increasing error. The re-tension compensation was also tested for dynamic changes in the proximal section and reduced error in the final configuration of the tip by 89.14% relative to the baseline case.