 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Modeling, and Evaluation of Separable Tendon-Driven Robotic Manipulator with Long, Passive, Flexible Proximal Section
Paper and Code
Jan 01, 2023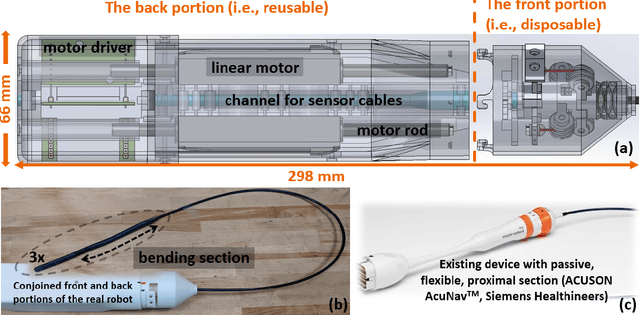


The purpose of this work was to tackle practical issues which arise when using a tendon-driven robotic manipulator with a long, passive, flexible proximal section in medical applications. A separable robot which overcomes difficulties in actuation and sterilization is introduced, in which the body containing the electronics is reusable and the remainder is disposable. A control input which resolves the redundancy in the kinematics and a physical interpretation of this redundancy are provided. The effect of a static change in the proximal section angle on bending angle error was explored under four testing conditions for a sinusoidal input. Bending angle error increased for increasing proximal section angle for all testing conditions with an average error reduction of 41.48% for retension, 4.28% for hysteresis, and 52.35% for re-tension + hysteresis compensation relative to the baseline case. Two major sources of error in tracking the bending angle were identified: time delay from hysteresis and DC offset from the proximal section angle. Examination of these error sources revealed that the simple hysteresis compensation was most effective for removing time delay and re-tension compensation for removing DC offset, which was the primary source of increasing error. The re-tension compensation was also tested for dynamic changes in the proximal section and reduced error in the final configuration of the tip by 89.14% relative to the baseline case.