 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
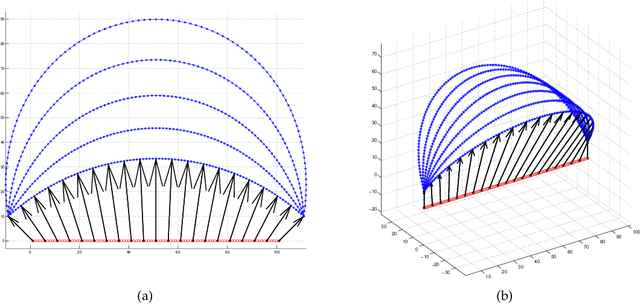
Add to EdgeFew-Shot Physics-Informed Neural Network for Shape Reconstruction of Concentric-Tube Robots
May 12, 2026Modeling concentric tube robots (CTRs) involves complex nonlinear continuum mechanics, and despite recent progress, physics-based models often lack an accurate representation of the experimental setups. To overcome these limitations, deep neural network-based models have been explored as alternatives with superior accuracy; however, they often overlook known mechanics, require large training datasets, and typically discard shape estimation of the robot. We present a physics-informed neural network (PINN) for kinematic modeling of a 6-DoF CTR with three pre-curved tubes that embeds the Cosserat rod differential equations and learns from few-shot observational data, balancing physics priors with data-driven fitting. PINN enables full-state estimation of shape, twist angle, torsional strain, bending moment, and orientation. Benchmark tests show a mean shape error below 1% of the robot length and accurately recovered other kinematic states, outperforming a purely physics-based Cosserat rod model baseline while using a minimal training set. The resulting model is also computationally efficient and robust, making it well-suited for real-time control applications.
Design, Modeling, and Evaluation of Separable Tendon-Driven Robotic Manipulator with Long, Passive, Flexible Proximal Section
Jan 01, 2023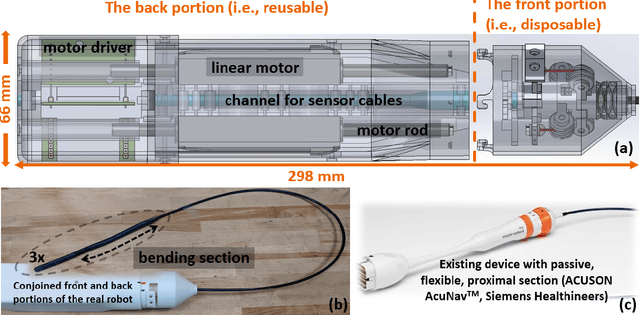

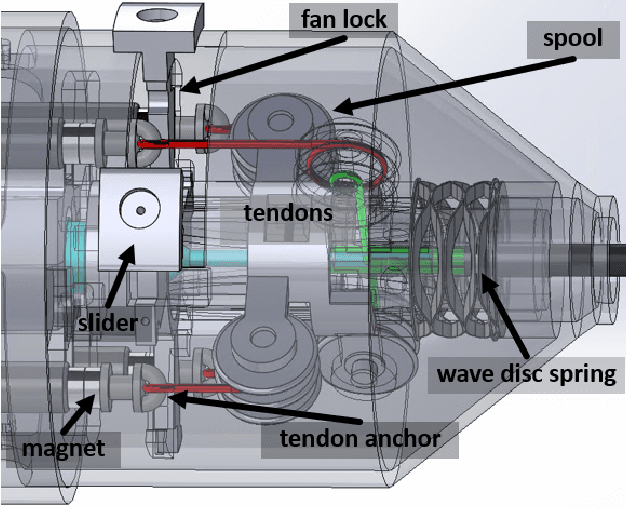

The purpose of this work was to tackle practical issues which arise when using a tendon-driven robotic manipulator with a long, passive, flexible proximal section in medical applications. A separable robot which overcomes difficulties in actuation and sterilization is introduced, in which the body containing the electronics is reusable and the remainder is disposable. A control input which resolves the redundancy in the kinematics and a physical interpretation of this redundancy are provided. The effect of a static change in the proximal section angle on bending angle error was explored under four testing conditions for a sinusoidal input. Bending angle error increased for increasing proximal section angle for all testing conditions with an average error reduction of 41.48% for retension, 4.28% for hysteresis, and 52.35% for re-tension + hysteresis compensation relative to the baseline case. Two major sources of error in tracking the bending angle were identified: time delay from hysteresis and DC offset from the proximal section angle. Examination of these error sources revealed that the simple hysteresis compensation was most effective for removing time delay and re-tension compensation for removing DC offset, which was the primary source of increasing error. The re-tension compensation was also tested for dynamic changes in the proximal section and reduced error in the final configuration of the tip by 89.14% relative to the baseline case.
Real-time Nonrigid Mosaicking of Laparoscopy Images
Mar 12, 2021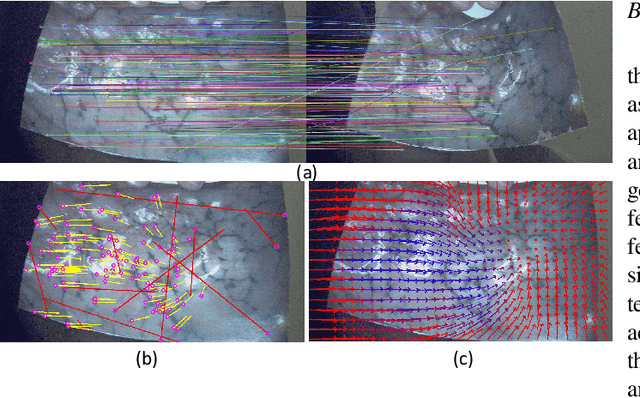
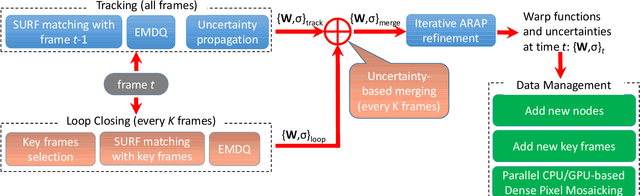
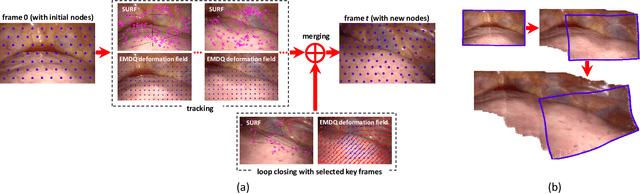
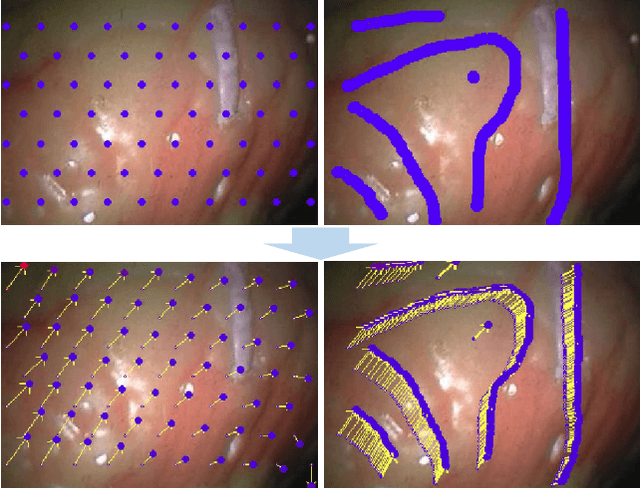
The ability to extend the field of view of laparoscopy images can help the surgeons to obtain a better understanding of the anatomical context. However, due to tissue deformation, complex camera motion and significant three-dimensional (3D) anatomical surface, image pixels may have non-rigid deformation and traditional mosaicking methods cannot work robustly for laparoscopy images in real-time. To solve this problem, a novel two-dimensional (2D) non-rigid simultaneous localization and mapping (SLAM) system is proposed in this paper, which is able to compensate for the deformation of pixels and perform image mosaicking in real-time. The key algorithm of this 2D non-rigid SLAM system is the expectation maximization and dual quaternion (EMDQ) algorithm, which can generate smooth and dense deformation field from sparse and noisy image feature matches in real-time. An uncertainty-based loop closing method has been proposed to reduce the accumulative errors. To achieve real-time performance, both CPU and GPU parallel computation technologies are used for dense mosaicking of all pixels. Experimental results on \textit{in vivo} and synthetic data demonstrate the feasibility and accuracy of our non-rigid mosaicking method.
F3RNet: Full-Resolution Residual Registration Network for Multimodal Image Registration
Sep 15, 2020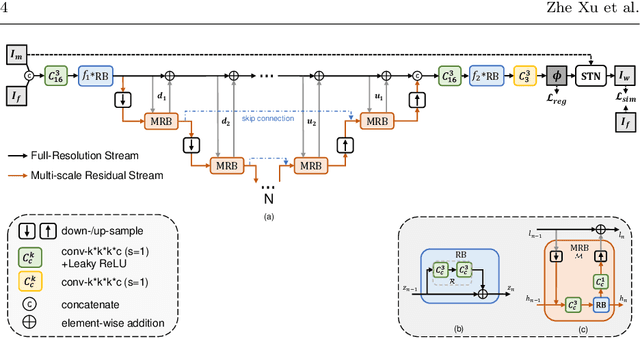
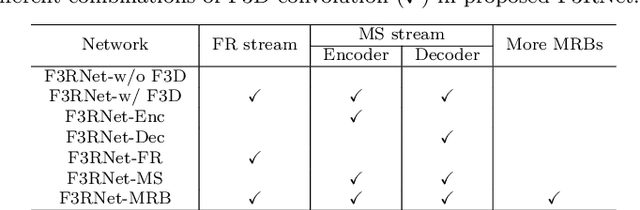
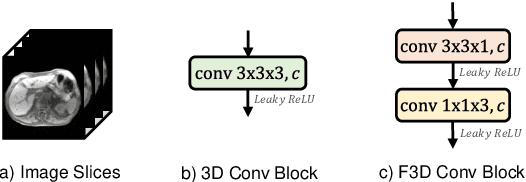
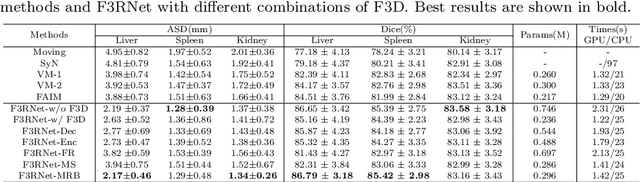
Multimodal deformable image registration is essential for many image-guided therapies. Recently, deep learning approaches have gained substantial popularity and success in deformable image registration. Most deep learning approaches use the so-called mono-stream "high-to-low, low-to-high" network structure, and can achieve satisfactory overall registration results. However, accurate alignments for some severely deformed local regions, which are crucial for pinpointing surgical targets, are often overlooked, especially for multimodal inputs with vast intensity differences. Consequently, these approaches are not sensitive to some hard-to-align regions, e.g., intra-patient registration of deformed liver lobes. In this paper, we propose a novel unsupervised registration network, namely Full-Resolution Residual Registration Network (F3RNet), for multimodal registration of severely deformed organs. The proposed method combines two parallel processing streams in a residual learning fashion. One stream takes advantage of the full-resolution information that facilitates accurate voxel-level registration. The other stream learns the deep multi-scale residual representations to obtain robust recognition. We also factorize the 3D convolution to reduce the training parameters and enhance network efficiency. We validate the proposed method on 50 sets of clinically acquired intra-patient abdominal CT-MRI data. Experiments on both CT-to-MRI and MRI-to-CT registration demonstrate promising results compared to state-of-the-art approaches.
Re-weighting and 1-Point RANSAC-Based PnP Solution to Handle Outliers
Jul 16, 2020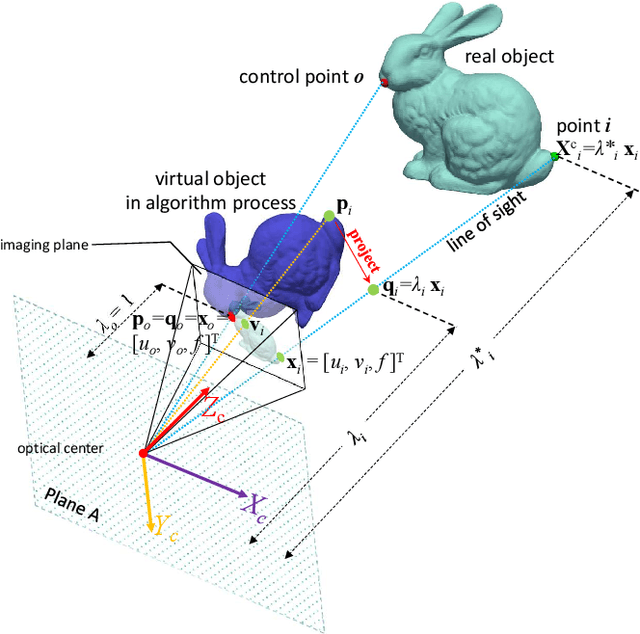
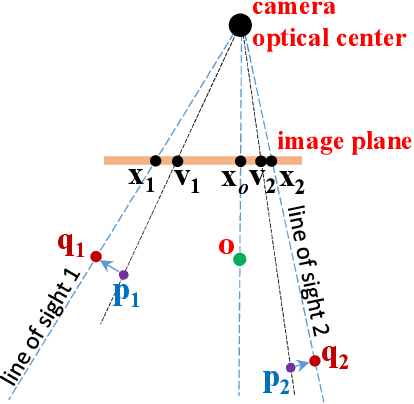
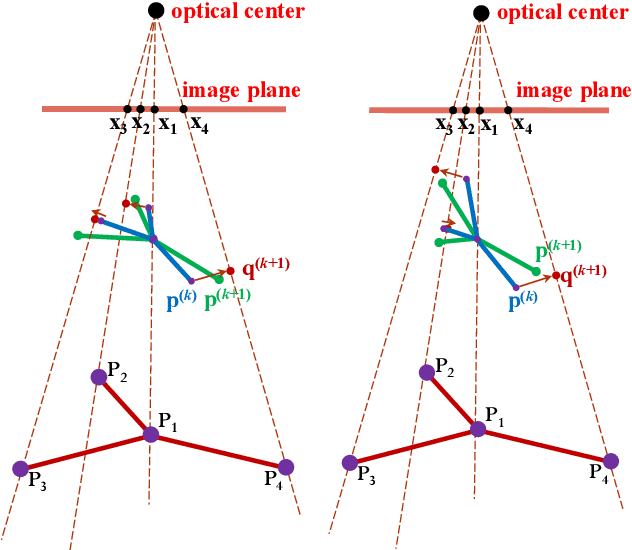
The ability to handle outliers is essential for performing the perspective-n-point (PnP) approach in practical applications, but conventional RANSAC+P3P or P4P methods have high time complexities. We propose a fast PnP solution named R1PPnP to handle outliers by utilizing a soft re-weighting mechanism and the 1-point RANSAC scheme. We first present a PnP algorithm, which serves as the core of R1PPnP, for solving the PnP problem in outlier-free situations. The core algorithm is an optimal process minimizing an objective function conducted with a random control point. Then, to reduce the impact of outliers, we propose a reprojection error-based re-weighting method and integrate it into the core algorithm. Finally, we employ the 1-point RANSAC scheme to try different control points. Experiments with synthetic and real-world data demonstrate that R1PPnP is faster than RANSAC+P3P or P4P methods especially when the percentage of outliers is large, and is accurate. Besides, comparisons with outlier-free synthetic data show that R1PPnP is among the most accurate and fast PnP solutions, which usually serve as the final refinement step of RANSAC+P3P or P4P. Compared with REPPnP, which is the state-of-the-art PnP algorithm with an explicit outliers-handling mechanism, R1PPnP is slower but does not suffer from the percentage of outliers limitation as REPPnP.
* https://github.com/haoyinzhou/PnP_Toolbox
Real-time Surface Deformation Recovery from Stereo Videos
Jul 16, 2020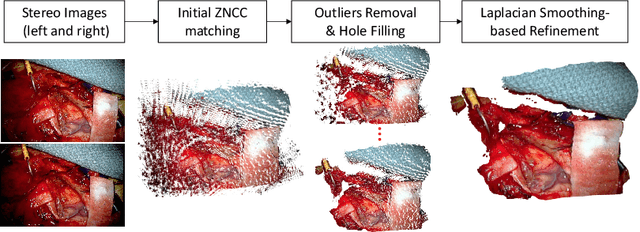
Tissue deformation during the surgery may significantly decrease the accuracy of surgical navigation systems. In this paper, we propose an approach to estimate the deformation of tissue surface from stereo videos in real-time, which is capable of handling occlusion, smooth surface and fast deformation. We first use a stereo matching method to extract depth information from stereo video frames and generate the tissue template, and then estimate the deformation of the obtained template by minimizing ICP, ORB feature matching and as-rigid-as-possible (ARAP) costs. The main novelties are twofold: (1) Due to non-rigid deformation, feature matching outliers are difficult to be removed by traditional RANSAC methods; therefore we propose a novel 1-point RANSAC and reweighting method to preselect matching inliers, which handles smooth surfaces and fast deformations. (2) We propose a novel ARAP cost function based on dense connections between the control points to achieve better smoothing performance with limited number of iterations. Algorithms are designed and implemented for GPU parallel computing. Experiments on ex- and in vivo data showed that this approach works at an update rate of 15Hz with an accuracy of less than 2.5 mm on a NVIDIA Titan X GPU.
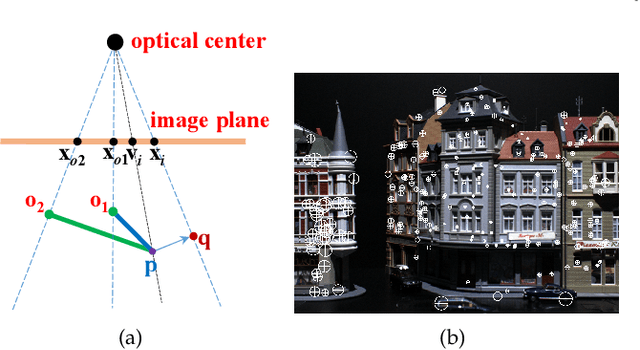
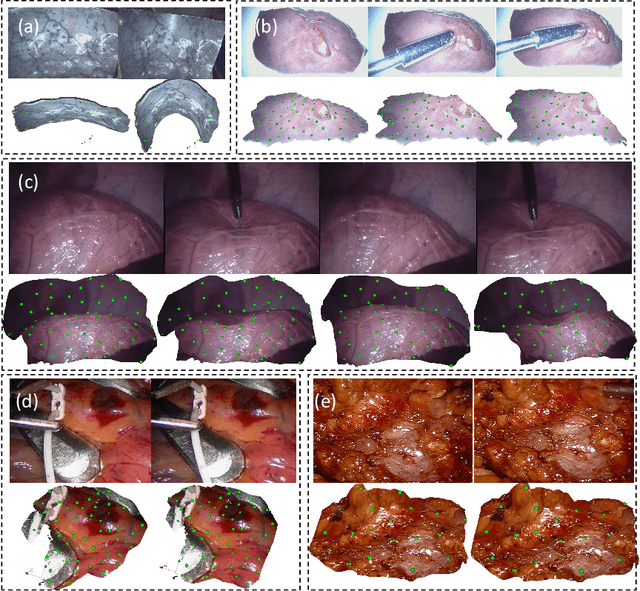
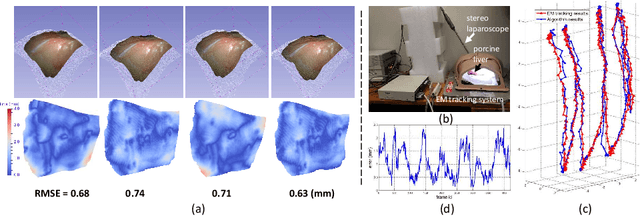
Real-time Dense Reconstruction of Tissue Surface from Stereo Optical Video
Jul 16, 2020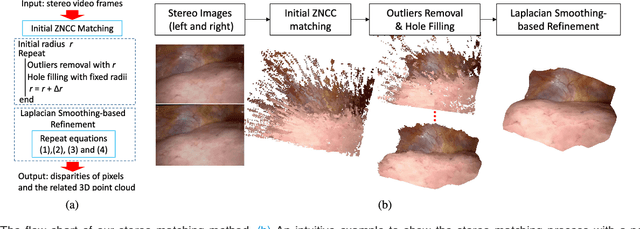
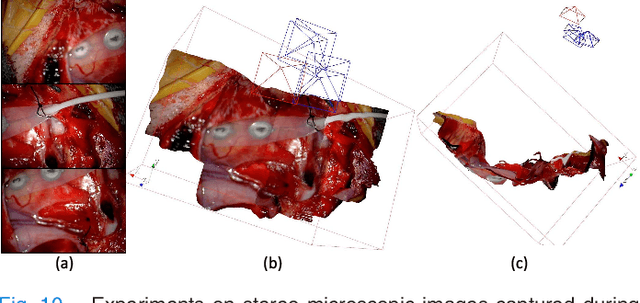
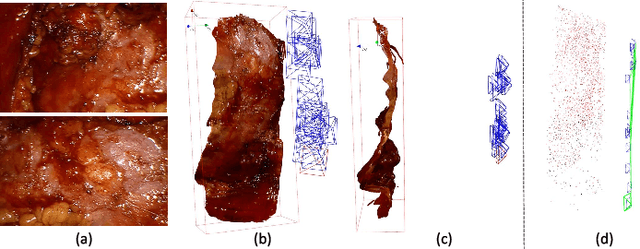
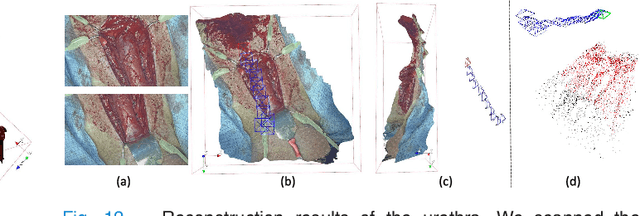
We propose an approach to reconstruct dense three-dimensional (3D) model of tissue surface from stereo optical videos in real-time, the basic idea of which is to first extract 3D information from video frames by using stereo matching, and then to mosaic the reconstructed 3D models. To handle the common low texture regions on tissue surfaces, we propose effective post-processing steps for the local stereo matching method to enlarge the radius of constraint, which include outliers removal, hole filling and smoothing. Since the tissue models obtained by stereo matching are limited to the field of view of the imaging modality, we propose a model mosaicking method by using a novel feature-based simultaneously localization and mapping (SLAM) method to align the models. Low texture regions and the varying illumination condition may lead to a large percentage of feature matching outliers. To solve this problem, we propose several algorithms to improve the robustness of SLAM, which mainly include (1) a histogram voting-based method to roughly select possible inliers from the feature matching results, (2) a novel 1-point RANSAC-based P$n$P algorithm called as DynamicR1PP$n$P to track the camera motion and (3) a GPU-based iterative closest points (ICP) and bundle adjustment (BA) method to refine the camera motion estimation results. Experimental results on ex- and in vivo data showed that the reconstructed 3D models have high resolution texture with an accuracy error of less than 2 mm. Most algorithms are highly parallelized for GPU computation, and the average runtime for processing one key frame is 76.3 ms on stereo images with 960x540 resolution.
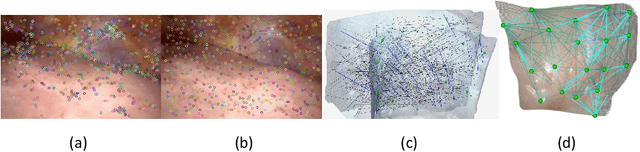
Smooth Deformation Field-based Mismatch Removal in Real-time
Jul 16, 2020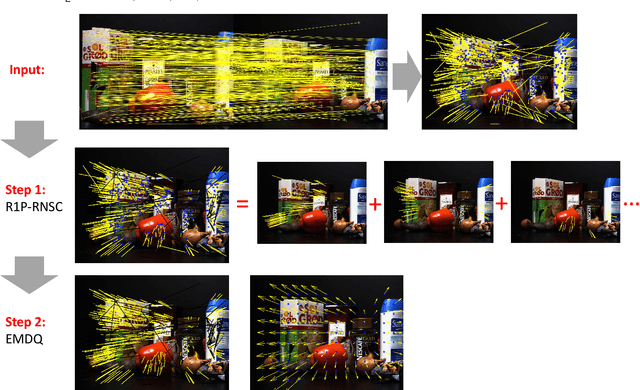

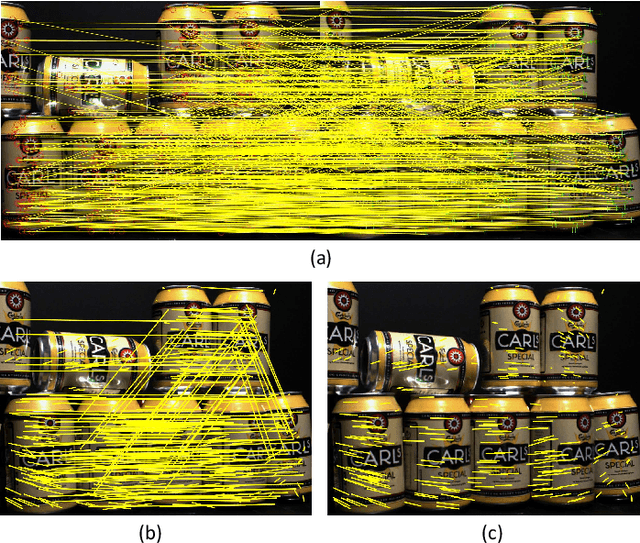
This paper studies the mismatch removal problem, which may serve as the subsequent step of feature matching. Non-rigid deformation makes it difficult to remove mismatches because no parametric transformation can be found. To solve this problem, we first propose an algorithm based on the re-weighting and 1-point RANSAC strategy (R1P-RNSC), which is a parametric method under a reasonable assumption that the non-rigid deformation can be approximately represented by multiple locally rigid transformations. R1P-RNSC is fast but suffers from a drawback that the local smoothing information cannot be taken into account. Then, we propose a non-parametric algorithm based on the expectation maximization algorithm and dual quaternion (EMDQ) representation to generate the smooth deformation field. The two algorithms compensate for the drawbacks of each other. Specifically, EMDQ needs good initial values provided by R1P-RNSC, and R1P-RNSC needs EMDQ for refinement. Experimental results with real-world data demonstrate that the combination of the two algorithms has the best accuracy compared to other state-of-the-art methods, which can handle up to 85% of outliers in real-time. The ability to generate dense deformation field from sparse matches with outliers in real-time makes the proposed algorithms have many potential applications, such as non-rigid registration and SLAM.
Mixed-Supervised Dual-Network for Medical Image Segmentation
Aug 26, 2019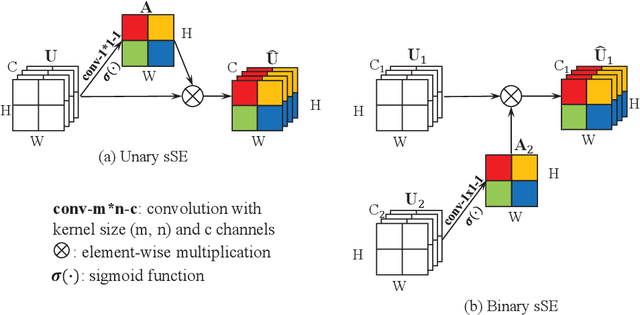

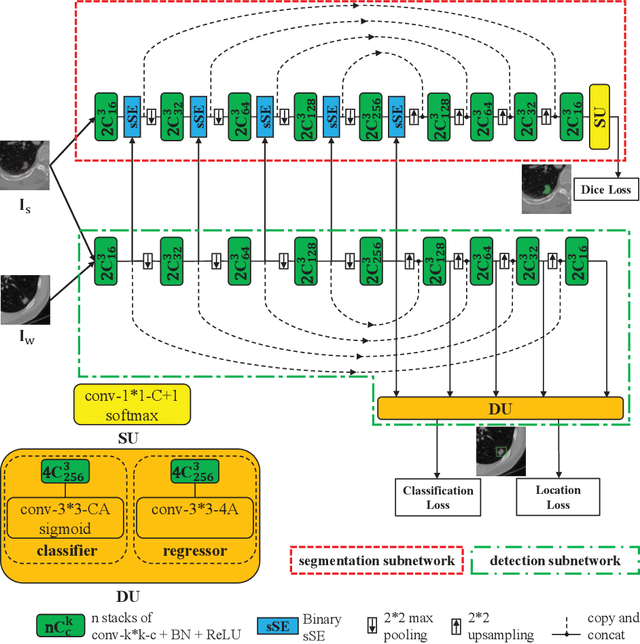
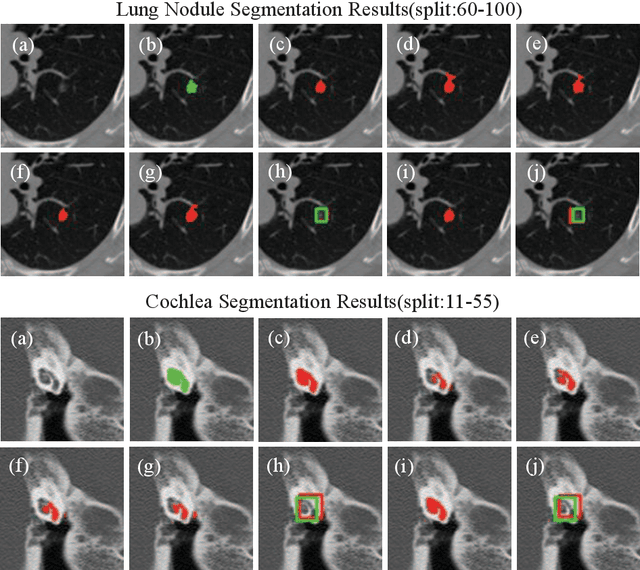
Deep learning based medical image segmentation models usually require large datasets with high-quality dense segmentations to train, which are very time-consuming and expensive to prepare. One way to tackle this challenge is by using the mixed-supervised learning framework, in which only a part of data is densely annotated with segmentation label and the rest is weakly labeled with bounding boxes. The model is trained jointly in a multi-task learning setting. In this paper, we propose Mixed-Supervised Dual-Network (MSDN), a novel architecture which consists of two separate networks for the detection and segmentation tasks respectively, and a series of connection modules between the layers of the two networks. These connection modules are used to transfer useful information from the auxiliary detection task to help the segmentation task. We propose to use a recent technique called "Squeeze and Excitation" in the connection module to boost the transfer. We conduct experiments on two medical image segmentation datasets. The proposed MSDN model outperforms multiple baselines.