 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Dense Reconstruction of Tissue Surface from Stereo Optical Video
Paper and Code
Jul 16, 2020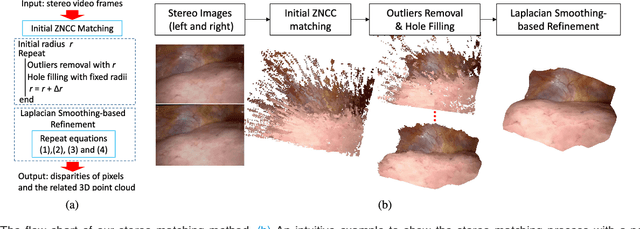
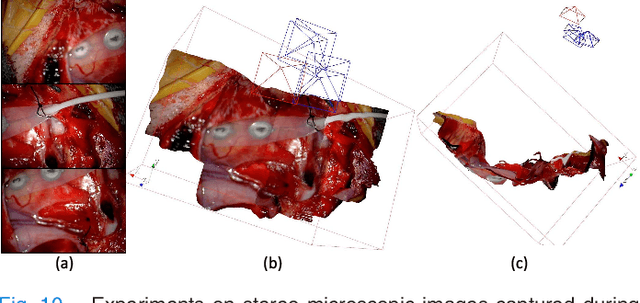
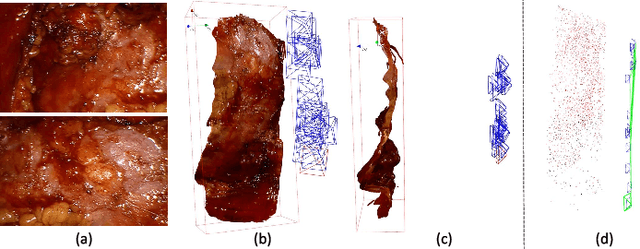
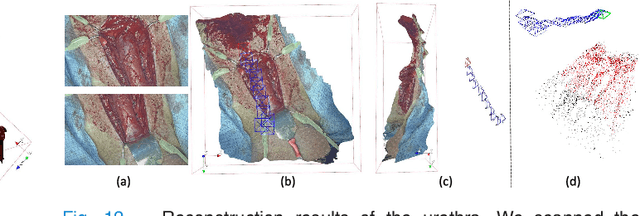
We propose an approach to reconstruct dense three-dimensional (3D) model of tissue surface from stereo optical videos in real-time, the basic idea of which is to first extract 3D information from video frames by using stereo matching, and then to mosaic the reconstructed 3D models. To handle the common low texture regions on tissue surfaces, we propose effective post-processing steps for the local stereo matching method to enlarge the radius of constraint, which include outliers removal, hole filling and smoothing. Since the tissue models obtained by stereo matching are limited to the field of view of the imaging modality, we propose a model mosaicking method by using a novel feature-based simultaneously localization and mapping (SLAM) method to align the models. Low texture regions and the varying illumination condition may lead to a large percentage of feature matching outliers. To solve this problem, we propose several algorithms to improve the robustness of SLAM, which mainly include (1) a histogram voting-based method to roughly select possible inliers from the feature matching results, (2) a novel 1-point RANSAC-based P$n$P algorithm called as DynamicR1PP$n$P to track the camera motion and (3) a GPU-based iterative closest points (ICP) and bundle adjustment (BA) method to refine the camera motion estimation results. Experimental results on ex- and in vivo data showed that the reconstructed 3D models have high resolution texture with an accuracy error of less than 2 mm. Most algorithms are highly parallelized for GPU computation, and the average runtime for processing one key frame is 76.3 ms on stereo images with 960x540 resolution.