 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-only UAV State Estimation for Fast Flights Without External Localization Systems: A2RL Drone Racing Finalist Approach
Feb 02, 2026Fast flights with aggressive maneuvers in cluttered GNSS-denied environments require fast, reliable, and accurate UAV state estimation. In this paper, we present an approach for onboard state estimation of a high-speed UAV using a monocular RGB camera and an IMU. Our approach fuses data from Visual-Inertial Odometry (VIO), an onboard landmark-based camera measurement system, and an IMU to produce an accurate state estimate. Using onboard measurement data, we estimate and compensate for VIO drift through a novel mathematical drift model. State-of-the-art approaches often rely on more complex hardware (e.g., stereo cameras or rangefinders) and use uncorrected drifting VIO velocities, orientation, and angular rates, leading to errors during fast maneuvers. In contrast, our method corrects all VIO states (position, orientation, linear and angular velocity), resulting in accurate state estimation even during rapid and dynamic motion. Our approach was thoroughly validated through 1600 simulations and numerous real-world experiments. Furthermore, we applied the proposed method in the A2RL Drone Racing Challenge 2025, where our team advanced to the final four out of 210 teams and earned a medal.
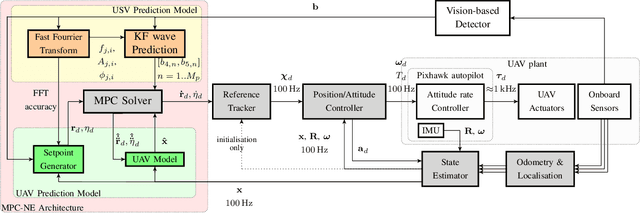
RVC-NMPC: Nonlinear Model Predictive Control with Reciprocal Velocity Constraints for Mutual Collision Avoidance in Agile UAV Flight
Dec 09, 2025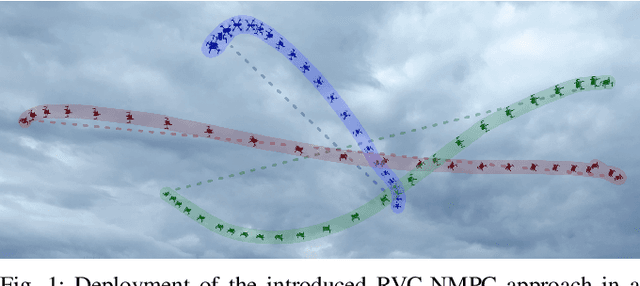



This paper presents an approach to mutual collision avoidance based on Nonlinear Model Predictive Control (NMPC) with time-dependent Reciprocal Velocity Constraints (RVCs). Unlike most existing methods, the proposed approach relies solely on observable information about other robots, eliminating the necessity of excessive communication use. The computationally efficient algorithm for computing RVCs, together with the direct integration of these constraints into NMPC problem formulation on a controller level, allows the whole pipeline to run at 100 Hz. This high processing rate, combined with modeled nonlinear dynamics of the controlled Uncrewed Aerial Vehicles (UAVs), is a key feature that facilitates the use of the proposed approach for an agile UAV flight. The proposed approach was evaluated through extensive simulations emulating real-world conditions in scenarios involving up to 10 UAVs and velocities of up to 25 m/s, and in real-world experiments with accelerations up to 30 m/s$^2$. Comparison with state of the art shows 31% improvement in terms of flight time reduction in challenging scenarios, while maintaining a collision-free navigation in all trials.
CurviTrack: Curvilinear Trajectory Tracking for High-speed Chase of a USV
Feb 28, 2025Heterogeneous robot teams used in marine environments incur time-and-energy penalties when the marine vehicle has to halt the mission to allow the autonomous aerial vehicle to land for recharging. In this paper, we present a solution for this problem using a novel drag-aware model formulation which is coupled with MPC, and therefore, enables tracking and landing during high-speed curvilinear trajectories of an USV without any communication. Compared to the state-of-the-art, our approach yields 40% decrease in prediction errors, and provides a 3-fold increase in certainty of predictions. Consequently, this leads to a 30% improvement in tracking performance and 40% higher success in landing on a moving USV even during aggressive turns that are unfeasible for conventional marine missions. We test our approach in two different real-world scenarios with marine vessels of two different sizes and further solidify our results through statistical analysis in simulation to demonstrate the robustness of our method.
Model predictive control-based trajectory generation for agile landing of unmanned aerial vehicle on a moving boat
Dec 10, 2024This paper proposes a novel trajectory generation method based on Model Predictive Control (MPC) for agile landing of an Unmanned Aerial Vehicle (UAV) onto an Unmanned Surface Vehicle (USV)'s deck in harsh conditions. The trajectory generation exploits the state predictions of the USV to create periodically updated trajectories for a multirotor UAV to precisely land on the deck of a moving USV even in cases where the deck's inclination is continuously changing. We use an MPC-based scheme to create trajectories that consider both the UAV dynamics and the predicted states of the USV up to the first derivative of position and orientation. Compared to existing approaches, our method dynamically modifies the penalization matrices to precisely follow the corresponding states with respect to the flight phase. Especially during the landing maneuver, the UAV synchronizes attitude with the USV's, allowing for fast landing on a tilted deck. Simulations show the method's reliability in various sea conditions up to Rough sea (wave height 4 m), outperforming state-of-the-art methods in landing speed and accuracy, with twice the precision on average. Finally, real-world experiments validate the simulation results, demonstrating robust landings on a moving USV, while all computations are performed in real-time onboard the UAV.
* 18 pages, 17 figures, Ocean Engineering
Landing a UAV in Harsh Winds and Turbulent Open Waters
Dec 31, 2022


Landing an unmanned aerial vehicle unmanned aerial vehicle (UAV) on top of an unmanned surface vehicle (USV) in harsh open waters is a challenging problem, owing to forces that can damage the UAV due to a severe roll and/or pitch angle of the USV during touchdown. To tackle this, we propose a novel model predictive control (MPC) approach enabling a UAV to land autonomously on a USV in these harsh conditions. The MPC employs a novel objective function and an online decomposition of the oscillatory motion of the vessel to predict, attempt, and accomplish the landing during near-zero tilt of the landing platform. The nonlinear prediction of the motion of the vessel is performed using visual data from an onboard camera. Therefore, the system does not require any communication with the USV or a control station. The proposed method was analyzed in numerous robotics simulations in harsh and extreme conditions and further validated in various real-world scenarios.