 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning Meets Visual Odometry
Paper and Code
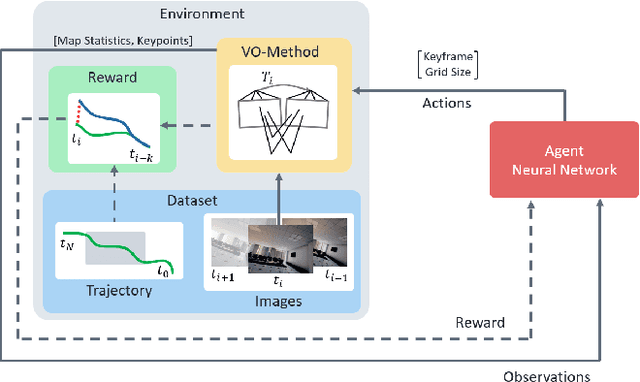

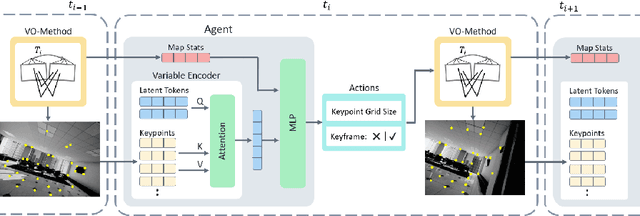

Visual Odometry (VO) is essential to downstream mobile robotics and augmented/virtual reality tasks. Despite recent advances, existing VO methods still rely on heuristic design choices that require several weeks of hyperparameter tuning by human experts, hindering generalizability and robustness. We address these challenges by reframing VO as a sequential decision-making task and applying Reinforcement Learning (RL) to adapt the VO process dynamically. Our approach introduces a neural network, operating as an agent within the VO pipeline, to make decisions such as keyframe and grid-size selection based on real-time conditions. Our method minimizes reliance on heuristic choices using a reward function based on pose error, runtime, and other metrics to guide the system. Our RL framework treats the VO system and the image sequence as an environment, with the agent receiving observations from keypoints, map statistics, and prior poses. Experimental results using classical VO methods and public benchmarks demonstrate improvements in accuracy and robustness, validating the generalizability of our RL-enhanced VO approach to different scenarios. We believe this paradigm shift advances VO technology by eliminating the need for time-intensive parameter tuning of heuristics.