 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgilicious: Open-Source and Open-Hardware Agile Quadrotor for Vision-Based Flight
Jul 12, 2023Autonomous, agile quadrotor flight raises fundamental challenges for robotics research in terms of perception, planning, learning, and control. A versatile and standardized platform is needed to accelerate research and let practitioners focus on the core problems. To this end, we present Agilicious, a co-designed hardware and software framework tailored to autonomous, agile quadrotor flight. It is completely open-source and open-hardware and supports both model-based and neural-network--based controllers. Also, it provides high thrust-to-weight and torque-to-inertia ratios for agility, onboard vision sensors, GPU-accelerated compute hardware for real-time perception and neural-network inference, a real-time flight controller, and a versatile software stack. In contrast to existing frameworks, Agilicious offers a unique combination of flexible software stack and high-performance hardware. We compare Agilicious with prior works and demonstrate it on different agile tasks, using both model-based and neural-network--based controllers. Our demonstrators include trajectory tracking at up to 5g and 70 km/h in a motion-capture system, and vision-based acrobatic flight and obstacle avoidance in both structured and unstructured environments using solely onboard perception. Finally, we demonstrate its use for hardware-in-the-loop simulation in virtual-reality environments. Thanks to its versatility, we believe that Agilicious supports the next generation of scientific and industrial quadrotor research.
* 14 pages, 5 figures, 2 tables
Nonlinear MPC for Quadrotor Fault-Tolerant Control
Sep 27, 2021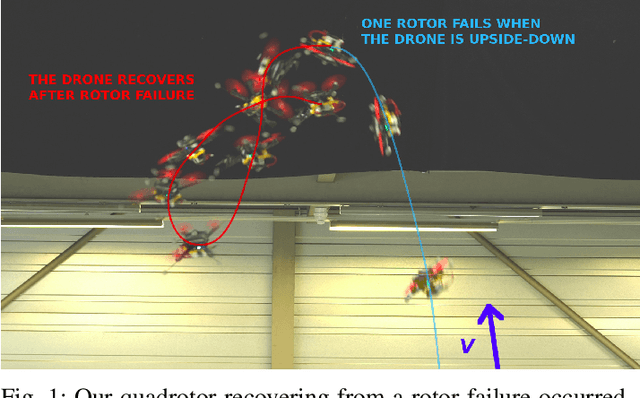
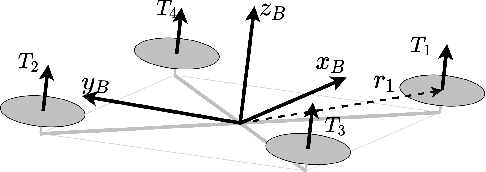
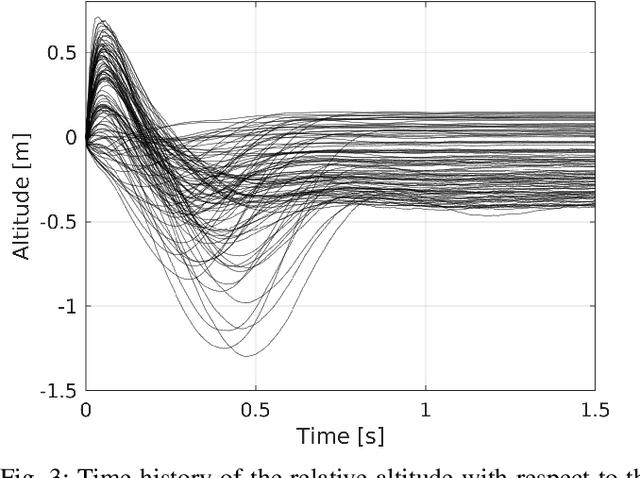
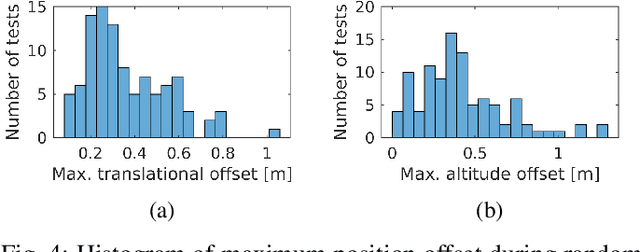
The mechanical simplicity, hover capabilities, and high agility of quadrotors lead to a fast adaption in the industry for inspection, exploration, and urban aerial mobility. On the other hand, the unstable and underactuated dynamics of quadrotors render them highly susceptible to system faults, especially rotor failures. In this work, we propose a fault-tolerant controller using the nonlinear model predictive control (NMPC) to stabilize and control a quadrotor subjected to the complete failure of a single rotor. Differently from existing works that either rely on linear assumptions or resort to cascaded structures neglecting input constraints in the outer-loop, our method leverages full nonlinear dynamics of the damaged quadrotor and considers the thrust constraint of each rotor. Hence, this method can seamlessly transition from nominal to rotor failure flights, and effectively perform upset recovery from extreme initial conditions. Extensive simulations and real-world experiments are conducted for validation, which demonstrates that the proposed NMPC method can effectively recover the damaged quadrotor even if the failure occurs during aggressive maneuvers, such as flipping and tracking agile trajectories.
Performance, Precision, and Payloads: Adaptive Nonlinear MPC for Quadrotors
Sep 09, 2021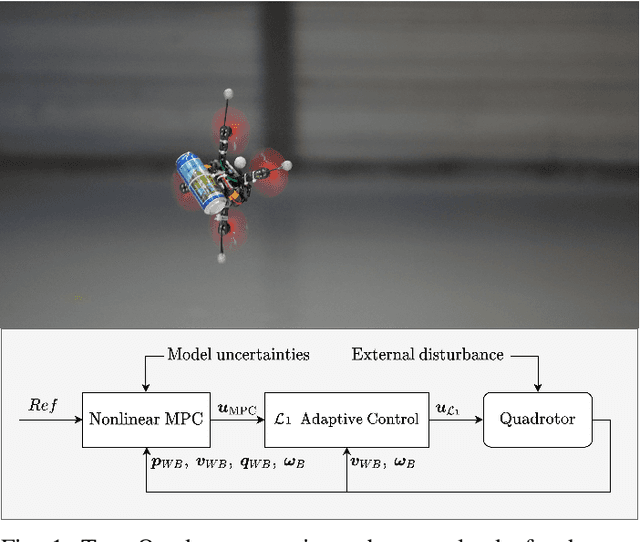
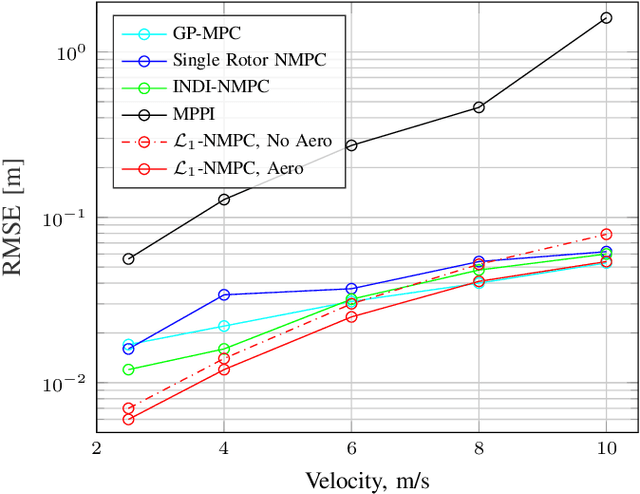
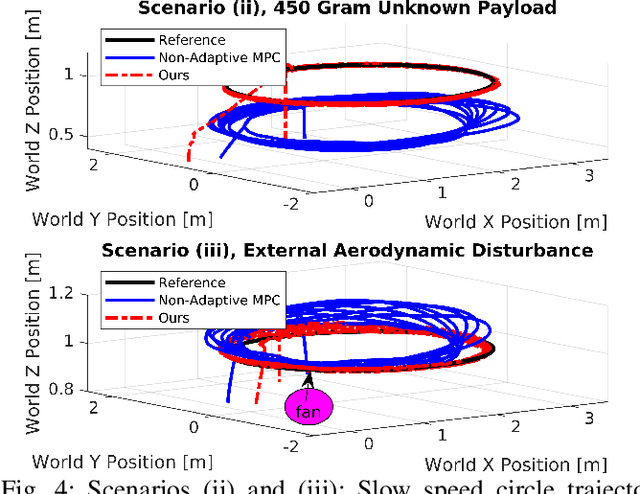
Agile quadrotor flight in challenging environments has the potential to revolutionize shipping, transportation, and search and rescue applications. Nonlinear model predictive control (NMPC) has recently shown promising results for agile quadrotor control, but relies on highly accurate models for maximum performance. Hence, model uncertainties in the form of unmodeled complex aerodynamic effects, varying payloads and parameter mismatch will degrade overall system performance. In this paper, we propose L1-NMPC, a novel hybrid adaptive NMPC to learn model uncertainties online and immediately compensate for them, drastically improving performance over the non-adaptive baseline with minimal computational overhead. Our proposed architecture generalizes to many different environments from which we evaluate wind, unknown payloads, and highly agile flight conditions. The proposed method demonstrates immense flexibility and robustness, with more than 90% tracking error reduction over non-adaptive NMPC under large unknown disturbances and without any gain tuning. In addition, the same controller with identical gains can accurately fly highly agile racing trajectories exhibiting top speeds of 70 km/h, offering tracking performance improvements of around 50% relative to the non-adaptive NMPC baseline. We will release our code fully open-sourced upon acceptance.
A Comparative Study of Nonlinear MPC and Differential-Flatness-Based Control for Quadrotor Agile Flight
Sep 06, 2021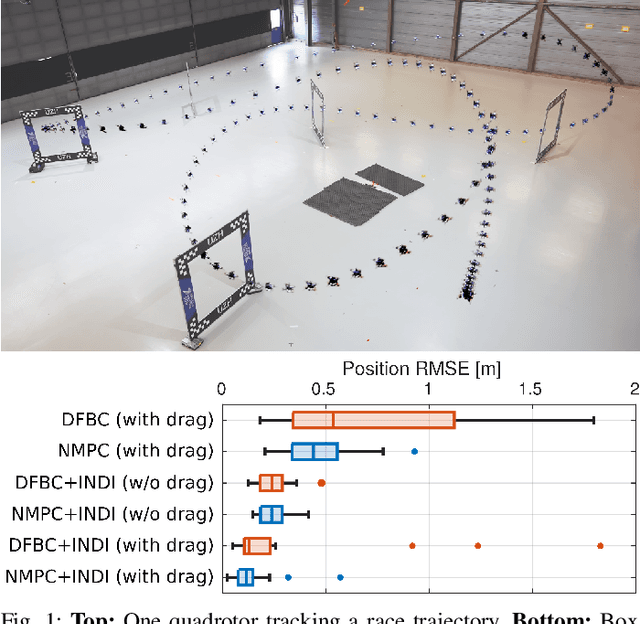


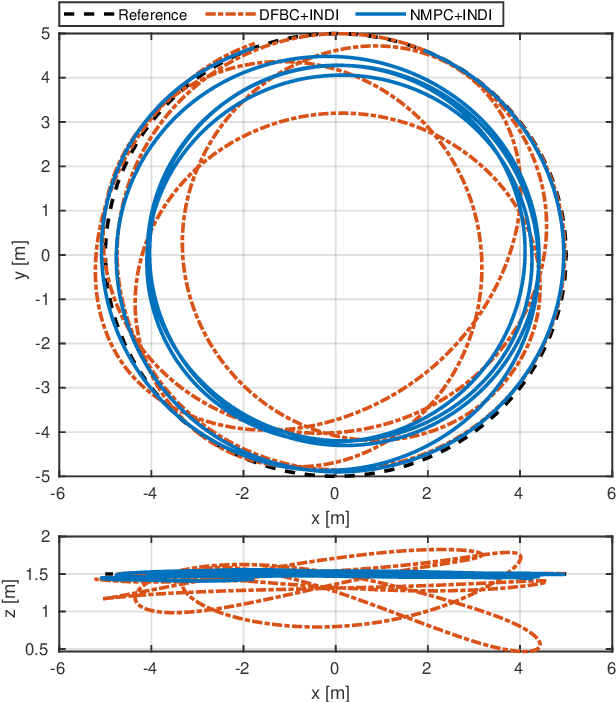
Accurate trajectory tracking control for quadrotors is essential for safe navigation in cluttered environments. However, this is challenging in agile flights due to nonlinear dynamics, complex aerodynamic effects, and actuation constraints. In this article, we empirically compare two state-of-the-art control frameworks: the nonlinear-model-predictive controller (NMPC) and the differential-flatness-based controller (DFBC), by tracking a wide variety of agile trajectories at speeds up to 72 km/h. The comparisons are performed in both simulation and real-world environments to systematically evaluate both methods from the aspect of tracking accuracy, robustness, and computational efficiency. We show the superiority of NMPC in tracking dynamically infeasible trajectories, at the cost of higher computation time and risk of numerical convergence issues. For both methods, we also quantitatively study the effect of adding an inner-loop controller using the incremental nonlinear dynamic inversion (INDI) method, and the effect of adding an aerodynamic drag model. Our real-world experiments, performed in one of the world's largest motion capture systems, demonstrate more than 78% tracking error reduction of both NMPC and DFBC, indicating the necessity of using an inner-loop controller and aerodynamic drag model for agile trajectory tracking.
Model Predictive Contouring Control for Near-Time-Optimal Quadrotor Flight
Aug 30, 2021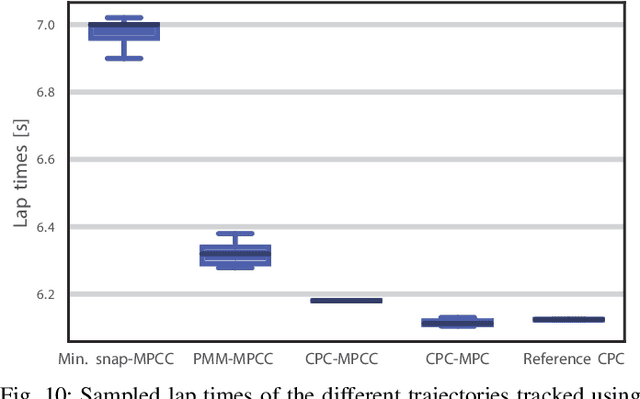
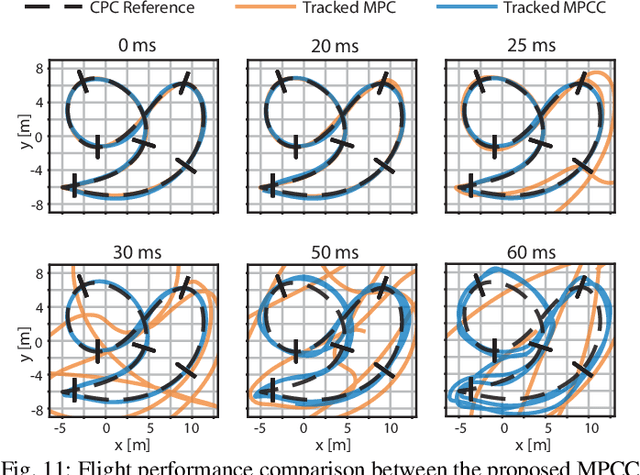

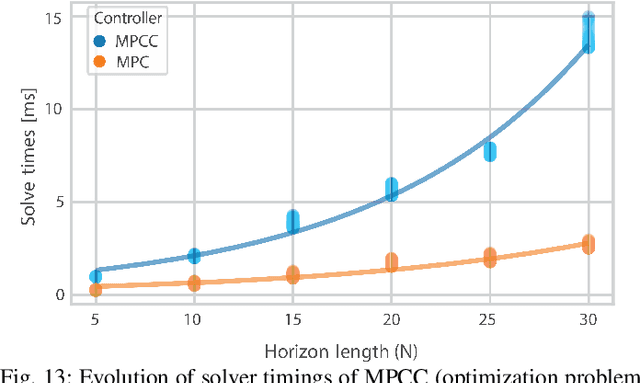
We tackle the problem of flying time-optimal trajectories through multiple waypoints with quadrotors. State-of-the-art solutions split the problem into a planning task - where a global, time-optimal trajectory is generated - and a control task - where this trajectory is accurately tracked. However, at the current state, generating a time-optimal trajectory that takes the full quadrotor model into account is computationally demanding (in the order of minutes or even hours). This is detrimental for replanning in presence of disturbances. We overcome this issue by solving the time-optimal planning and control problems concurrently via Model Predictive Contouring Control (MPCC). Our MPCC optimally selects the future states of the platform at runtime, while maximizing the progress along the reference path and minimizing the distance to it. We show that, even when tracking simplified trajectories, the proposed MPCC results in a path that approaches the true time-optimal one, and which can be generated in real-time. We validate our approach in the real-world, where we show that our method outperforms both the current state-of-the-art and a world-class human pilot in terms of lap time achieving speeds of up to 60 km/h.
Time-Optimal Planning for Quadrotor Waypoint Flight
Aug 26, 2021Quadrotors are among the most agile flying robots. However, planning time-optimal trajectories at the actuation limit through multiple waypoints remains an open problem. This is crucial for applications such as inspection, delivery, search and rescue, and drone racing. Early works used polynomial trajectory formulations, which do not exploit the full actuator potential because of their inherent smoothness. Recent works resorted to numerical optimization but require waypoints to be allocated as costs or constraints at specific discrete times. However, this time allocation is a priori unknown and renders previous works incapable of producing truly time-optimal trajectories. To generate truly time-optimal trajectories, we propose a solution to the time allocation problem while exploiting the full quadrotor's actuator potential. We achieve this by introducing a formulation of progress along the trajectory, which enables the simultaneous optimization of the time allocation and the trajectory itself. We compare our method against related approaches and validate it in real-world flights in one of the world's largest motion-capture systems, where we outperform human expert drone pilots in a drone-racing task.
* Narrated video footage available at https://youtu.be/ZPI8U1uSJUs. arXiv admin note: text overlap with arXiv:2007.06255
NeuroBEM: Hybrid Aerodynamic Quadrotor Model
Jun 15, 2021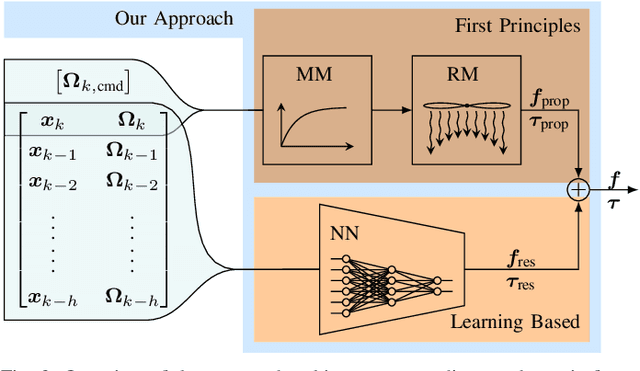
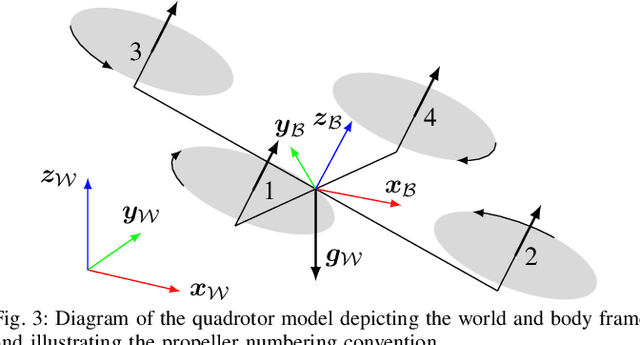

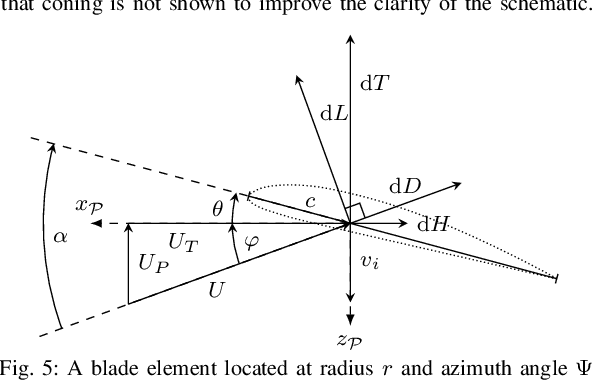
Quadrotors are extremely agile, so much in fact, that classic first-principle-models come to their limits. Aerodynamic effects, while insignificant at low speeds, become the dominant model defect during high speeds or agile maneuvers. Accurate modeling is needed to design robust high-performance control systems and enable flying close to the platform's physical limits. We propose a hybrid approach fusing first principles and learning to model quadrotors and their aerodynamic effects with unprecedented accuracy. First principles fail to capture such aerodynamic effects, rendering traditional approaches inaccurate when used for simulation or controller tuning. Data-driven approaches try to capture aerodynamic effects with blackbox modeling, such as neural networks; however, they struggle to robustly generalize to arbitrary flight conditions. Our hybrid approach unifies and outperforms both first-principles blade-element theory and learned residual dynamics. It is evaluated in one of the world's largest motion-capture systems, using autonomous-quadrotor-flight data at speeds up to 65km/h. The resulting model captures the aerodynamic thrust, torques, and parasitic effects with astonishing accuracy, outperforming existing models with 50% reduced prediction errors, and shows strong generalization capabilities beyond the training set.
* 9 pages + 1 pages references
Data-Driven MPC for Quadrotors
Mar 03, 2021

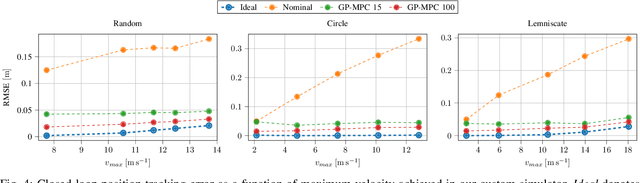
Aerodynamic forces render accurate high-speed trajectory tracking with quadrotors extremely challenging. These complex aerodynamic effects become a significant disturbance at high speeds, introducing large positional tracking errors, and are extremely difficult to model. To fly at high speeds, feedback control must be able to account for these aerodynamic effects in real-time. This necessitates a modelling procedure that is both accurate and efficient to evaluate. Therefore, we present an approach to model aerodynamic effects using Gaussian Processes, which we incorporate into a Model Predictive Controller to achieve efficient and precise real-time feedback control, leading to up to 70% reduction in trajectory tracking error at high speeds. We verify our method by extensive comparison to a state-of-the-art linear drag model in synthetic and real-world experiments at speeds of up to 14m/s and accelerations beyond 4g.
* 8 pages
CPC: Complementary Progress Constraints for Time-Optimal Quadrotor Trajectories
Aug 03, 2020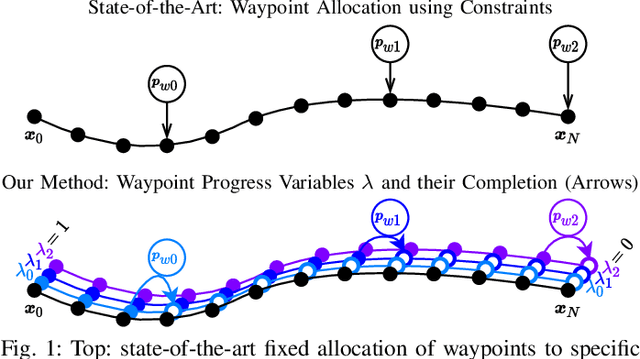



In many mobile robotics scenarios, such as drone racing, the goal is to generate a trajectory that passes through multiple waypoints in minimal time. This problem is referred to as time-optimal planning. State-of-the-art approaches either use polynomial trajectory formulations, which are suboptimal due to their smoothness, or numerical optimization, which requires waypoints to be allocated as costs or constraints to specific discrete-time nodes. For time-optimal planning, this time-allocation is a priori unknown and renders traditional approaches incapable of producing truly time-optimal trajectories. We introduce a novel formulation of progress bound to waypoints by a complementarity constraint. While the progress variables indicate the completion of a waypoint, change of this progress is only allowed in local proximity to the waypoint via complementarity constraints. This enables the simultaneous optimization of the trajectory and the time-allocation of the waypoints. To the best of our knowledge, this is the first approach allowing for truly time-optimal trajectory planning for quadrotors and other systems. We perform and discuss evaluations on optimality and convexity, compare to other related approaches, and qualitatively to an expert-human baseline.
AlphaPilot: Autonomous Drone Racing
May 26, 2020

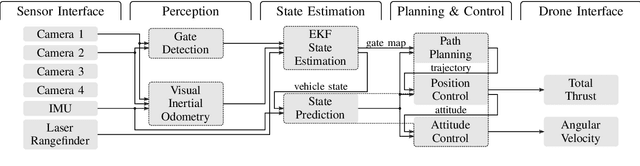
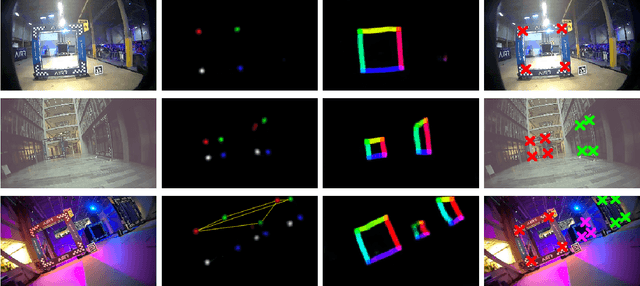
This paper presents a novel system for autonomous, vision-based drone racing combining learned data abstraction, nonlinear filtering, and time-optimal trajectory planning. The system has successfully been deployed at the first autonomous drone racing world championship: the 2019 AlphaPilot Challenge. Contrary to traditional drone racing systems, which only detect the next gate, our approach makes use of any visible gate and takes advantage of multiple, simultaneous gate detections to compensate for drift in the state estimate and build a global map of the gates. The global map and drift-compensated state estimate allow the drone to navigate through the race course even when the gates are not immediately visible and further enable to plan a near time-optimal path through the race course in real time based on approximate drone dynamics. The proposed system has been demonstrated to successfully guide the drone through tight race courses reaching speeds up to 8m/s and ranked second at the 2019 AlphaPilot Challenge.