 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Study of Nonlinear MPC and Differential-Flatness-Based Control for Quadrotor Agile Flight
Paper and Code
Sep 06, 2021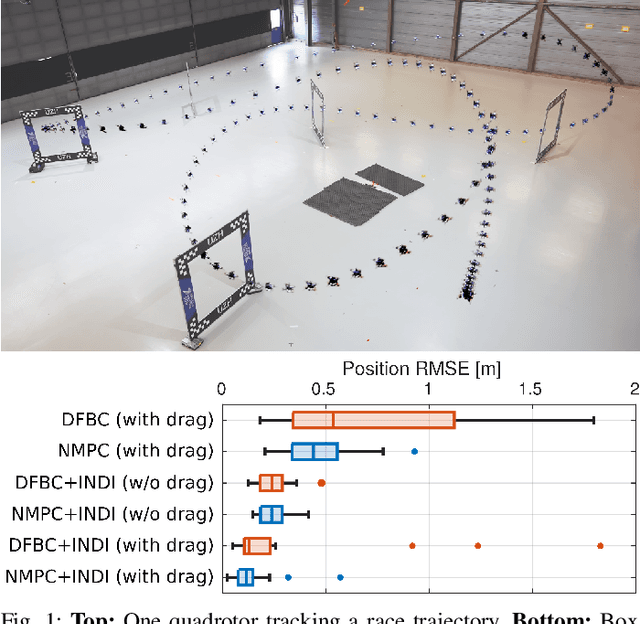


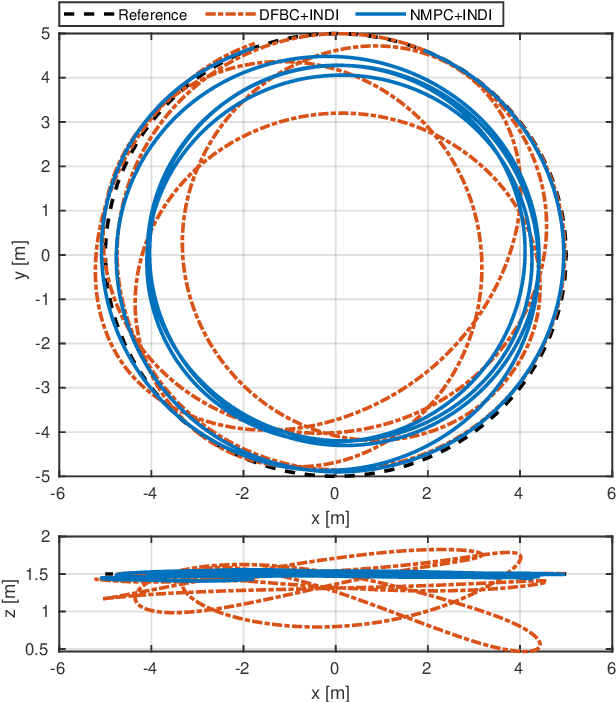
Accurate trajectory tracking control for quadrotors is essential for safe navigation in cluttered environments. However, this is challenging in agile flights due to nonlinear dynamics, complex aerodynamic effects, and actuation constraints. In this article, we empirically compare two state-of-the-art control frameworks: the nonlinear-model-predictive controller (NMPC) and the differential-flatness-based controller (DFBC), by tracking a wide variety of agile trajectories at speeds up to 72 km/h. The comparisons are performed in both simulation and real-world environments to systematically evaluate both methods from the aspect of tracking accuracy, robustness, and computational efficiency. We show the superiority of NMPC in tracking dynamically infeasible trajectories, at the cost of higher computation time and risk of numerical convergence issues. For both methods, we also quantitatively study the effect of adding an inner-loop controller using the incremental nonlinear dynamic inversion (INDI) method, and the effect of adding an aerodynamic drag model. Our real-world experiments, performed in one of the world's largest motion capture systems, demonstrate more than 78% tracking error reduction of both NMPC and DFBC, indicating the necessity of using an inner-loop controller and aerodynamic drag model for agile trajectory tracking.