 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRADRON: Cooperative Localization of Ionizing Radiation Sources by MAVs with Compton Cameras
Oct 29, 2025We present a novel approach to localizing radioactive material by cooperating Micro Aerial Vehicles (MAVs). Our approach utilizes a state-of-the-art single-detector Compton camera as a highly sensitive, yet miniature detector of ionizing radiation. The detector's exceptionally low weight (40 g) opens up new possibilities of radiation detection by a team of cooperating agile MAVs. We propose a new fundamental concept of fusing the Compton camera measurements to estimate the position of the radiation source in real time even from extremely sparse measurements. The data readout and processing are performed directly onboard and the results are used in a dynamic feedback to drive the motion of the vehicles. The MAVs are stabilized in a tightly cooperating swarm to maximize the information gained by the Compton cameras, rapidly locate the radiation source, and even track a moving radiation source.
CAT-ORA: Collision-Aware Time-Optimal Formation Reshaping for Efficient Robot Coordination in 3D Environments
Nov 30, 2024In this paper, we introduce an algorithm designed to address the problem of time-optimal formation reshaping in three-dimensional environments while preventing collisions between agents. The utility of the proposed approach is particularly evident in mobile robotics, where agents benefit from being organized and navigated in formation for a variety of real-world applications requiring frequent alterations in formation shape for efficient navigation or task completion. Given the constrained operational time inherent to battery-powered mobile robots, the time needed to complete the formation reshaping process is crucial for their efficient operation, especially in case of multi-rotor Unmanned Aerial Vehicles (UAVs). The proposed Collision-Aware Time-Optimal formation Reshaping Algorithm (CAT-ORA) builds upon the Hungarian algorithm for the solution of the robot-to-goal assignment implementing the inter-agent collision avoidance through direct constraints on mutually exclusive robot-goal pairs combined with a trajectory generation approach minimizing the duration of the reshaping process. Theoretical validations confirm the optimality of CAT-ORA, with its efficacy further showcased through simulations, and a real-world outdoor experiment involving 19 UAVs. Thorough numerical analysis shows the potential of CAT-ORA to decrease the time required to perform complex formation reshaping tasks by up to 49%, and 12% on average compared to commonly used methods in randomly generated scenarios.
MRS Drone: A Modular Platform for Real-World Deployment of Aerial Multi-Robot Systems
Jun 12, 2023This paper presents a modular autonomous Unmanned Aerial Vehicle (UAV) platform called the Multi-robot Systems (MRS) Drone that can be used in a large range of indoor and outdoor applications. The MRS Drone features unique modularity with respect to changes in actuators, frames, and sensory configuration. As the name suggests, the platform is specially tailored for deployment within a MRS group. The MRS Drone contributes to the state-of-the-art of UAV platforms by allowing smooth real-world deployment of multiple aerial robots, as well as by outperforming other platforms with its modularity. For real-world multi-robot deployment in various applications, the platform is easy to both assemble and modify. Moreover, it is accompanied by a realistic simulator to enable safe pre-flight testing and a smooth transition to complex real-world experiments. In this manuscript, we present mechanical and electrical designs, software architecture, and technical specifications to build a fully autonomous multi UAV system. Finally, we demonstrate the full capabilities and the unique modularity of the MRS Drone in various real-world applications that required a diverse range of platform configurations.
MRS Modular UAV Hardware Platforms for Supporting Research in Real-World Outdoor and Indoor Environments
Feb 09, 2023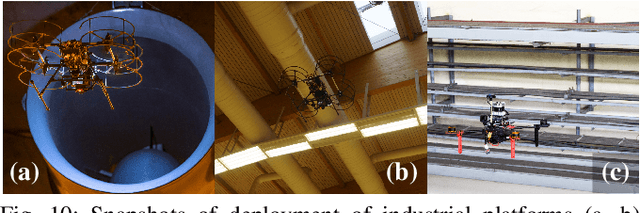
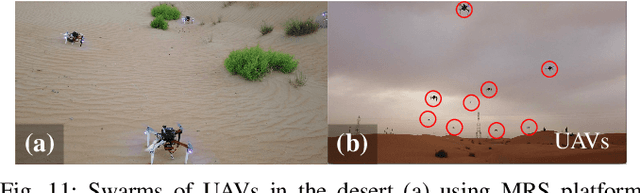
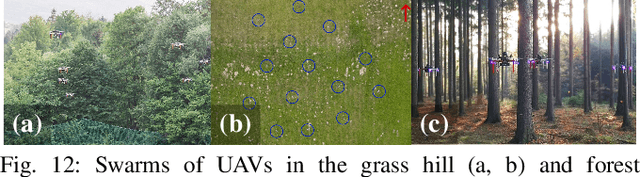
This paper presents a family of autonomous Unmanned Aerial Vehicles (UAVs) platforms designed for a diverse range of indoor and outdoor applications. The proposed UAV design is highly modular in terms of used actuators, sensor configurations, and even UAV frames. This allows to achieve, with minimal effort, a proper experimental setup for single, as well as, multi robot scenarios. Presented platforms are intended to facilitate the transition from simulations, and simplified laboratory experiments, into the deployment of aerial robots into uncertain and hard-to-model real-world conditions. We present mechanical designs, electric configurations, and dynamic models of the UAVs, followed by numerous recommendations and technical details required for building such a fully autonomous UAV system for experimental verification of scientific achievements. To show strength and high variability of the proposed system, we present results of tens of completely different real-robot experiments in various environments using distinct actuator and sensory configurations.
* 10 pages, 17 figures, conference
Autonomous Cooperative Wall Building by a Team of Unmanned Aerial Vehicles in the MBZIRC 2020 Competition
Dec 10, 2020

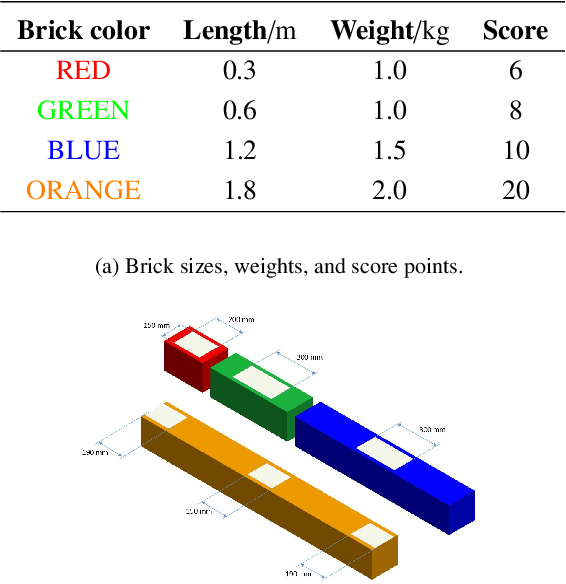
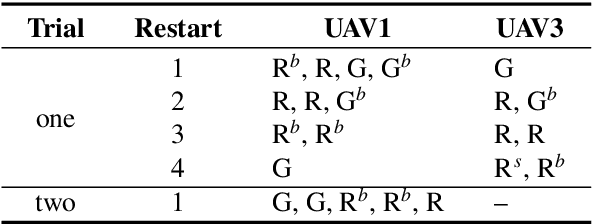
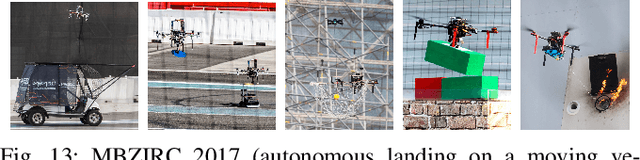
This paper presents a system for autonomous cooperative wall building with a team of Unmanned Aerial Vehicles (UAVs). The system was developed for Challenge 2 of the Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2020. The wall-building scenario of Challenge 2 featured an initial stack of bricks and wall structure where the individual bricks had to be placed by a team of three UAVs. The objective of the task was to maximize collected points for placing the bricks within the restricted construction time while following the prescribed wall pattern. The proposed approach uses initial scanning to find a priori unknown locations of the bricks and the wall structure. Each UAV is then assigned to individual bricks and wall placing locations and further perform grasping and placement using onboard resources only. The developed system consists of methods for scanning a given area, RGB-D detection of bricks and wall placement locations, precise grasping and placing of bricks, and coordination of multiple UAVs. The paper describes the overall system, individual components, experimental verification in demanding outdoor conditions, the achieved results in the competition, and lessons learned. The presented CTU-UPenn-NYU approach achieved the overall best performance among all participants to won the MBZIRC competition by collecting the highest number of points by correct placement of a high number of bricks.