 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Minimalistic 3D Self-Organized UAV Flocking Approach for Desert Exploration
Dec 03, 2024In this work, we propose a minimalistic swarm flocking approach for multirotor unmanned aerial vehicles (UAVs). Our approach allows the swarm to achieve cohesively and aligned flocking (collective motion), in a random direction, without externally provided directional information exchange (alignment control). The method relies on minimalistic sensory requirements as it uses only the relative range and bearing of swarm agents in local proximity obtained through onboard sensors on the UAV. Thus, our method is able to stabilize and control the flock of a general shape above a steep terrain without any explicit communication between swarm members. To implement proximal control in a three-dimensional manner, the Lennard-Jones potential function is used to maintain cohesiveness and avoid collisions between robots. The performance of the proposed approach was tested in real-world conditions by experiments with a team of nine UAVs. Experiments also present the usage of our approach on UAVs that are independent of external positioning systems such as the Global Navigation Satellite System (GNSS). Relying only on a relative visual localization through the ultraviolet direction and ranging (UVDAR) system, previously proposed by our group, the experiments verify that our system can be applied in GNSS-denied environments. The degree achieved of alignment and cohesiveness was evaluated using the metrics of order and steady-state value.
Fast Swarming of UAVs in GNSS-denied Feature-poor Environments without Explicit Communication
Apr 29, 2024



A decentralized swarm approach for the fast cooperative flight of Unmanned Aerial Vehicles (UAVs) in feature-poor environments without any external localization and communication is introduced in this paper. A novel model of a UAV neighborhood is proposed to achieve robust onboard mutual perception and flocking state feedback control, which is designed to decrease the inter-agent oscillations common in standard reactive swarm models employed in fast collective motion. The novel swarming methodology is supplemented with an enhanced Multi-Robot State Estimation (MRSE) strategy to increase the reliability of the purely onboard localization, which may be unreliable in real environments. Although MRSE and the neighborhood model may rely on information exchange between agents, we introduce a communication-less version of the swarming framework based on estimating communicated states to decrease dependence on the often unreliable communication networks of large swarms. The proposed solution has been verified by a set of complex real-world experiments to demonstrate its overall capability in different conditions, including a UAV interception-motivated task with a group velocity reaching the physical limits of the individual hardware platforms.
Emergence of specialized Collective Behaviors in Evolving Heterogeneous Swarms
Feb 07, 2024



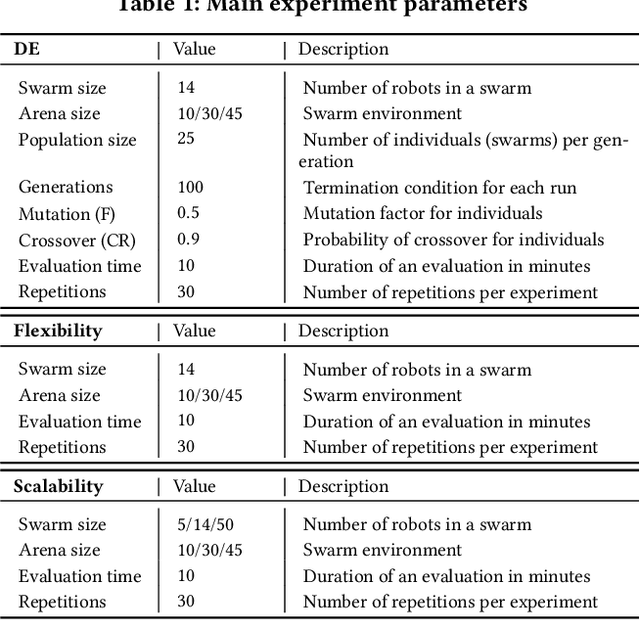
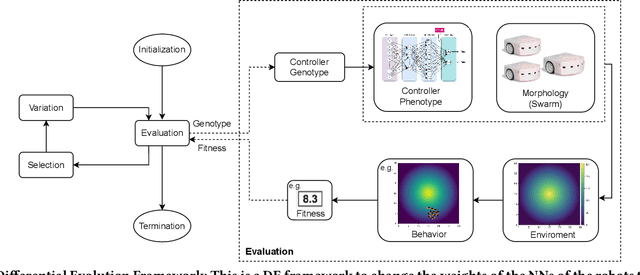
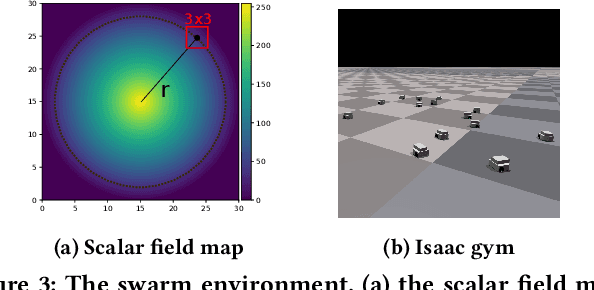
Natural groups of animals, such as swarms of social insects, exhibit astonishing degrees of task specialization, useful to address complex tasks and to survive. This is supported by phenotypic plasticity: individuals sharing the same genotype that is expressed differently for different classes of individuals, each specializing in one task. In this work, we evolve a swarm of simulated robots with phenotypic plasticity to study the emergence of specialized collective behavior during an emergent perception task. Phenotypic plasticity is realized in the form of heterogeneity of behavior by dividing the genotype into two components, with one different neural network controller associated to each component. The whole genotype, expressing the behavior of the whole group through the two components, is subject to evolution with a single fitness function. We analyse the obtained behaviors and use the insights provided by these results to design an online regulatory mechanism. Our experiments show three main findings: 1) The sub-groups evolve distinct emergent behaviors. 2) The effectiveness of the whole swarm depends on the interaction between the two sub-groups, leading to a more robust performance than with singular sub-group behavior. 3) The online regulatory mechanism enhances overall performance and scalability.
Land & Localize: An Infrastructure-free and Scalable Nano-Drones Swarm with UWB-based Localization
Jul 17, 2023



Relative localization is a crucial functional block of any robotic swarm. We address it in a fleet of nano-drones characterized by a 10 cm-scale form factor, which makes them highly versatile but also strictly limited in their onboard power envelope. State-of-the-Art solutions leverage Ultra-WideBand (UWB) technology, allowing distance range measurements between peer nano-drones and a stationary infrastructure of multiple UWB anchors. Therefore, we propose an UWB-based infrastructure-free nano-drones swarm, where part of the fleet acts as dynamic anchors, i.e., anchor-drones (ADs), capable of automatic deployment and landing. By varying the Ads' position constraint, we develop three alternative solutions with different trade-offs between flexibility and localization accuracy. In-field results, with four flying mission-drones (MDs), show a localization root mean square error (RMSE) spanning from 15.3 cm to 27.8 cm, at most. Scaling the number of MDs from 4 to 8, the RMSE marginally increases, i.e., less than 10 cm at most. The power consumption of the MDs' UWB module amounts to 342 mW. Ultimately, compared to a fixed-infrastructure commercial solution, our infrastructure-free system can be deployed anywhere and rapidly by taking 5.7 s to self-localize 4 ADs with a localization RMSE of up to 12.3% in the most challenging case with 8 MDs.
One-shot Learning for Autonomous Aerial Manipulation
Jun 03, 2022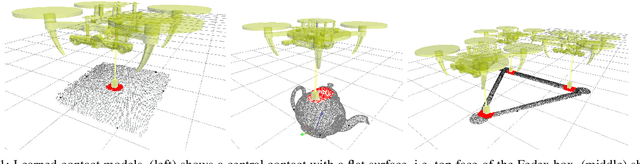
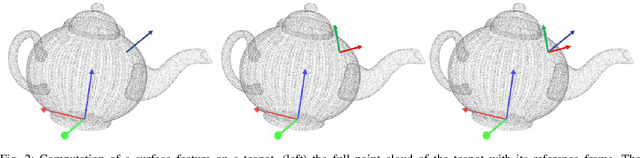
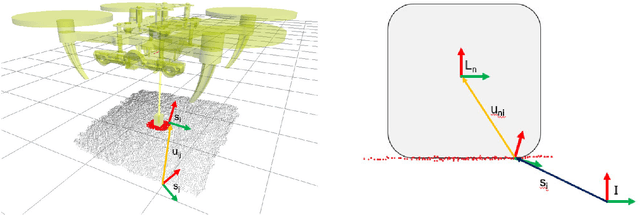
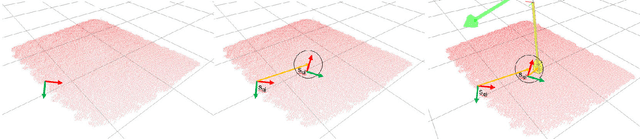
This paper is concerned with learning transferable contact models for aerial manipulation tasks. We investigate a contact-based approach for enabling unmanned aerial vehicles with cable-suspended passive grippers to compute the attach points on novel payloads for aerial transportation. This is the first time that the problem of autonomously generating contact points for such tasks has been investigated. Our approach builds on the underpinning idea that we can learn a probability density of contacts over objects' surfaces from a single demonstration. We enhance this formulation for encoding aerial transportation tasks while maintaining the one-shot learning paradigm without handcrafting task-dependent features or employing ad-hoc heuristics; the only prior is extrapolated directly from a single demonstration. Our models only rely on the geometrical properties of the payloads computed from a point cloud, and they are robust to partial views. The effectiveness of our approach is evaluated in simulation, in which one or three quadropters are requested to transport previously unseen payloads along a desired trajectory. The contact points and the quadroptors configurations are computed on-the-fly for each test by our apporach and compared with a baseline method, a modified grasp learning algorithm from the literature. Empirical experiments show that the contacts generated by our approach yield a better controllability of the payload for a transportation task. We conclude this paper with a discussion on the strengths and limitations of the presented idea, and our suggested future research directions.
Environment induced emergence of collective behaviour in evolving swarms with limited sensing
Apr 11, 2022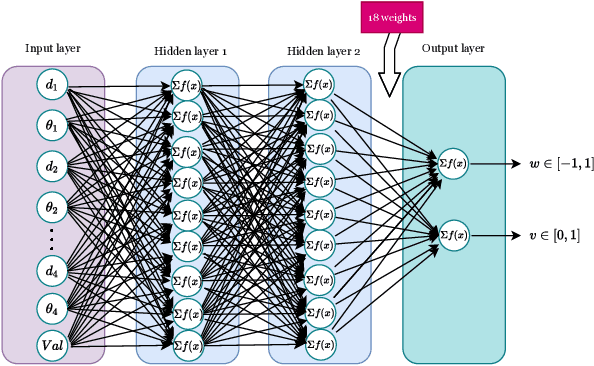
Designing controllers for robot swarms is challenging, because human developers have typically no good understanding of the link between the details of a controller that governs individual robots and the swarm behavior that is an indirect result of the interactions between swarm members and the environment. In this paper we investigate whether an evolutionary approach can mitigate this problem. We consider a very challenging task where robots with limited sensing and communication abilities must follow the gradient of an environmental feature and use Differential Evolution to evolve a neural network controller for simulated robots. We conduct a systematic study to measure the flexibility and scalability of the method by varying the size of the arena and number of robots in the swarm. The experiments confirm the feasibility of our approach, the evolved robot controllers induced swarm behavior that solved the task. We found that solutions evolved under the harshest conditions (where the environmental clues were the weakest) were the most flexible and that there is a sweet spot regarding the swarm size. Furthermore, we observed collective motion of the swarm, showcasing truly emergent behavior that was not represented in- and selected for during evolution.
Comparing lifetime learning methods for morphologically evolving robots
Mar 08, 2022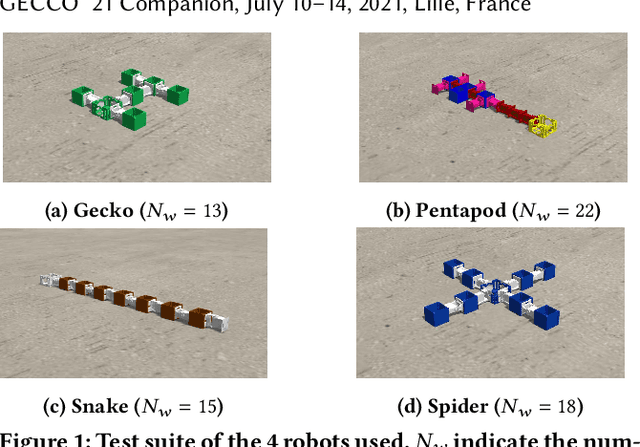
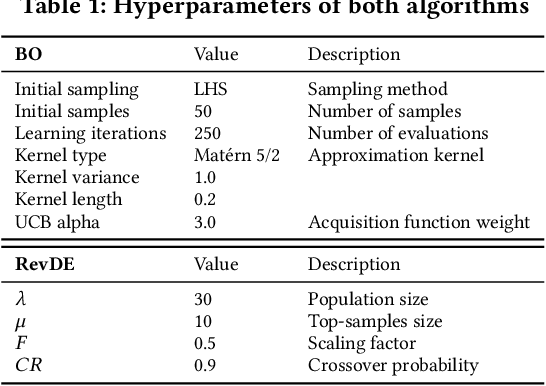
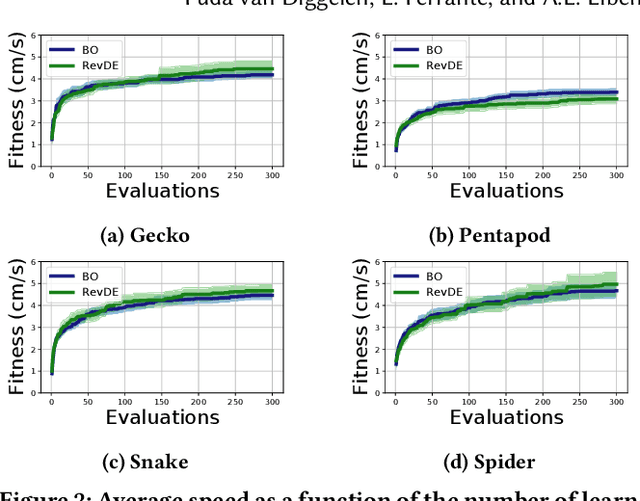
Evolving morphologies and controllers of robots simultaneously leads to a problem: Even if the parents have well-matching bodies and brains, the stochastic recombination can break this match and cause a body-brain mismatch in their offspring. We argue that this can be mitigated by having newborn robots perform a learning process that optimizes their inherited brain quickly after birth. We compare three different algorithms for doing this. To this end, we consider three algorithmic properties, efficiency, efficacy, and the sensitivity to differences in the morphologies of the robots that run the learning process.
Heritability in Morphological Robot Evolution
Oct 21, 2021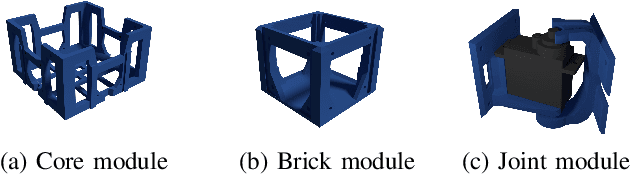
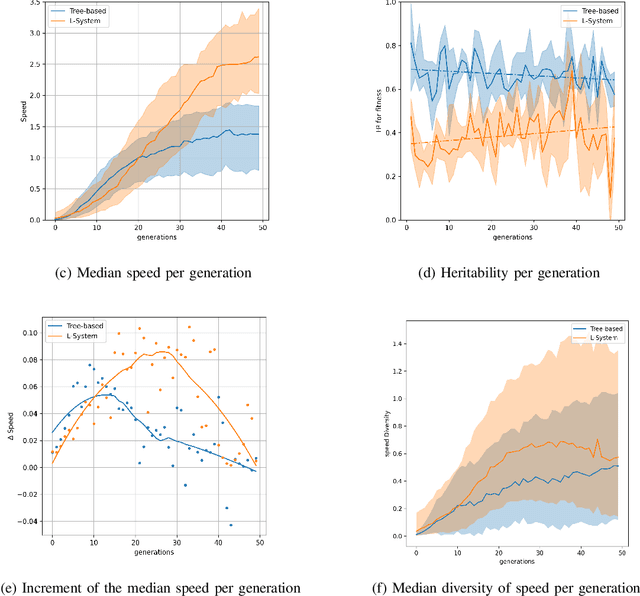
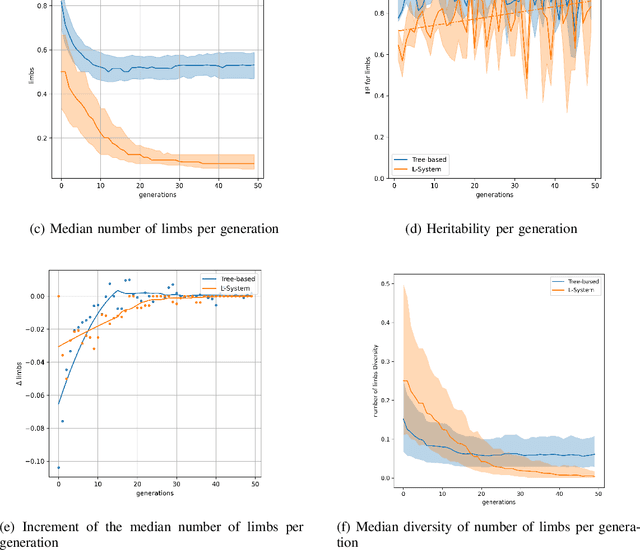
In the field of evolutionary robotics, choosing the correct encoding is very complicated, especially when robots evolve both behaviours and morphologies at the same time. With the objective of improving our understanding of the mapping process from encodings to functional robots, we introduce the biological notion of heritability, which captures the amount of phenotypic variation caused by genotypic variation. In our analysis we measure the heritability on the first generation of robots evolved from two different encodings, a direct encoding and an indirect encoding. In addition we investigate the interplay between heritability and phenotypic diversity through the course of an entire evolutionary process. In particular, we investigate how direct and indirect genotypes can exhibit preferences for exploration or exploitation throughout the course of evolution. We observe how an exploration or exploitation tradeoff can be more easily understood by examining patterns in heritability and phenotypic diversity. In conclusion, we show how heritability can be a useful tool to better understand the relationship between genotypes and phenotypes, especially helpful when designing more complicated systems where complex individuals and environments can adapt and influence each other.
Environmental regulation using Plasticoding for the evolution of robots
May 29, 2020
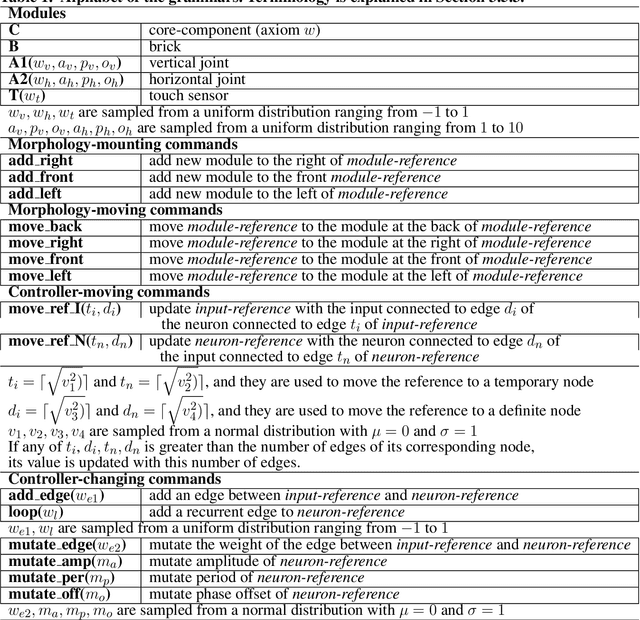
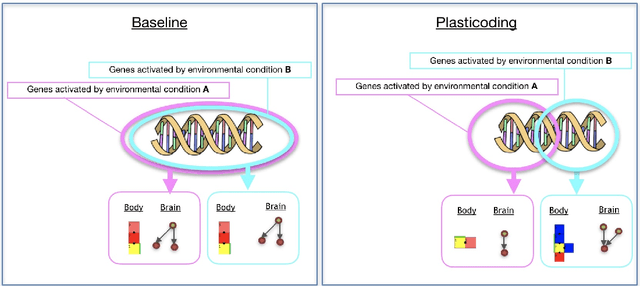
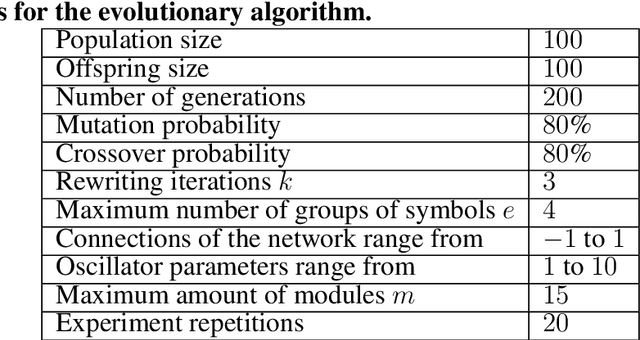
Evolutionary robot systems are usually affected by the properties of the environment indirectly through selection. In this paper, we present and investigate a system where the environment also has a direct effect: through regulation. We propose a novel robot encoding method where a genotype encodes multiple possible phenotypes, and the incarnation of a robot depends on the environmental conditions taking place in a determined moment of its life. This means that the morphology, controller, and behavior of a robot can change according to the environment. Importantly, this process of development can happen at any moment of a robot lifetime, according to its experienced environmental stimuli. We provide an empirical proof-of-concept, and the analysis of the experimental results shows that Plasticoding improves adaptation (task performance) while leading to different evolved morphologies, controllers, and behaviour.