 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergence of specialized Collective Behaviors in Evolving Heterogeneous Swarms
Feb 07, 2024



Natural groups of animals, such as swarms of social insects, exhibit astonishing degrees of task specialization, useful to address complex tasks and to survive. This is supported by phenotypic plasticity: individuals sharing the same genotype that is expressed differently for different classes of individuals, each specializing in one task. In this work, we evolve a swarm of simulated robots with phenotypic plasticity to study the emergence of specialized collective behavior during an emergent perception task. Phenotypic plasticity is realized in the form of heterogeneity of behavior by dividing the genotype into two components, with one different neural network controller associated to each component. The whole genotype, expressing the behavior of the whole group through the two components, is subject to evolution with a single fitness function. We analyse the obtained behaviors and use the insights provided by these results to design an online regulatory mechanism. Our experiments show three main findings: 1) The sub-groups evolve distinct emergent behaviors. 2) The effectiveness of the whole swarm depends on the interaction between the two sub-groups, leading to a more robust performance than with singular sub-group behavior. 3) The online regulatory mechanism enhances overall performance and scalability.
Environment induced emergence of collective behaviour in evolving swarms with limited sensing
Apr 11, 2022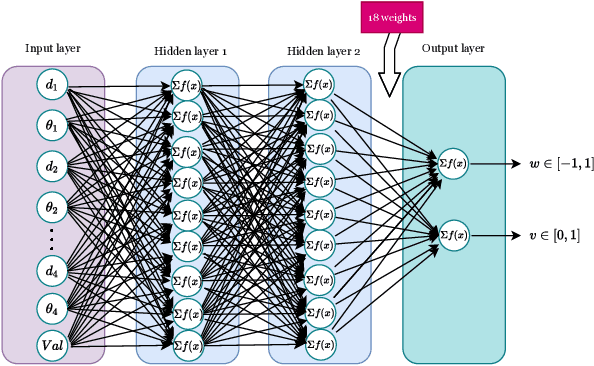
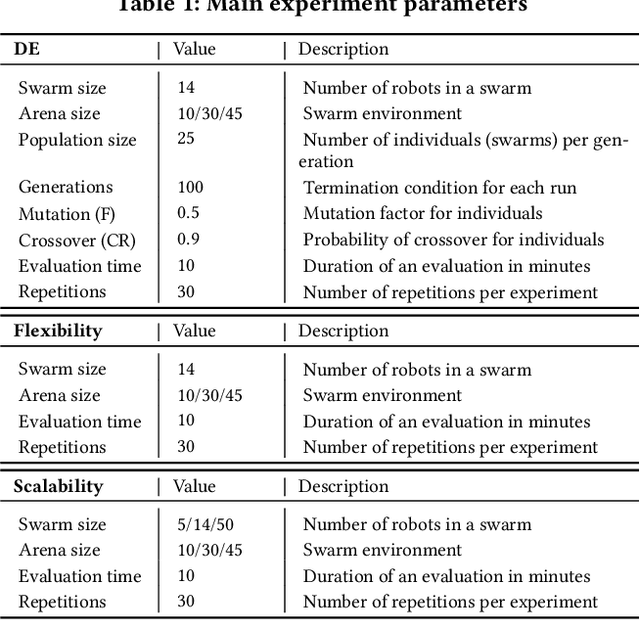
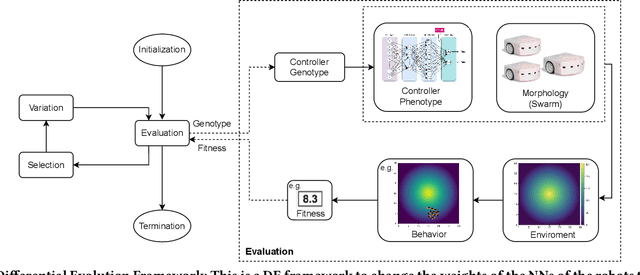
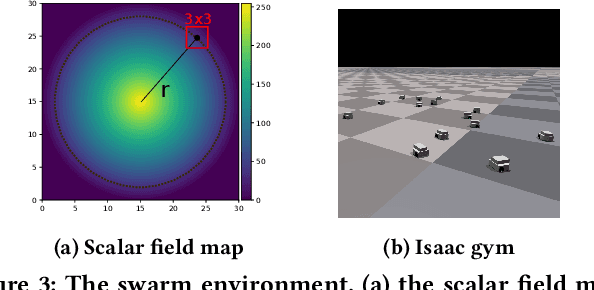
Designing controllers for robot swarms is challenging, because human developers have typically no good understanding of the link between the details of a controller that governs individual robots and the swarm behavior that is an indirect result of the interactions between swarm members and the environment. In this paper we investigate whether an evolutionary approach can mitigate this problem. We consider a very challenging task where robots with limited sensing and communication abilities must follow the gradient of an environmental feature and use Differential Evolution to evolve a neural network controller for simulated robots. We conduct a systematic study to measure the flexibility and scalability of the method by varying the size of the arena and number of robots in the swarm. The experiments confirm the feasibility of our approach, the evolved robot controllers induced swarm behavior that solved the task. We found that solutions evolved under the harshest conditions (where the environmental clues were the weakest) were the most flexible and that there is a sweet spot regarding the swarm size. Furthermore, we observed collective motion of the swarm, showcasing truly emergent behavior that was not represented in- and selected for during evolution.